
mdeming1
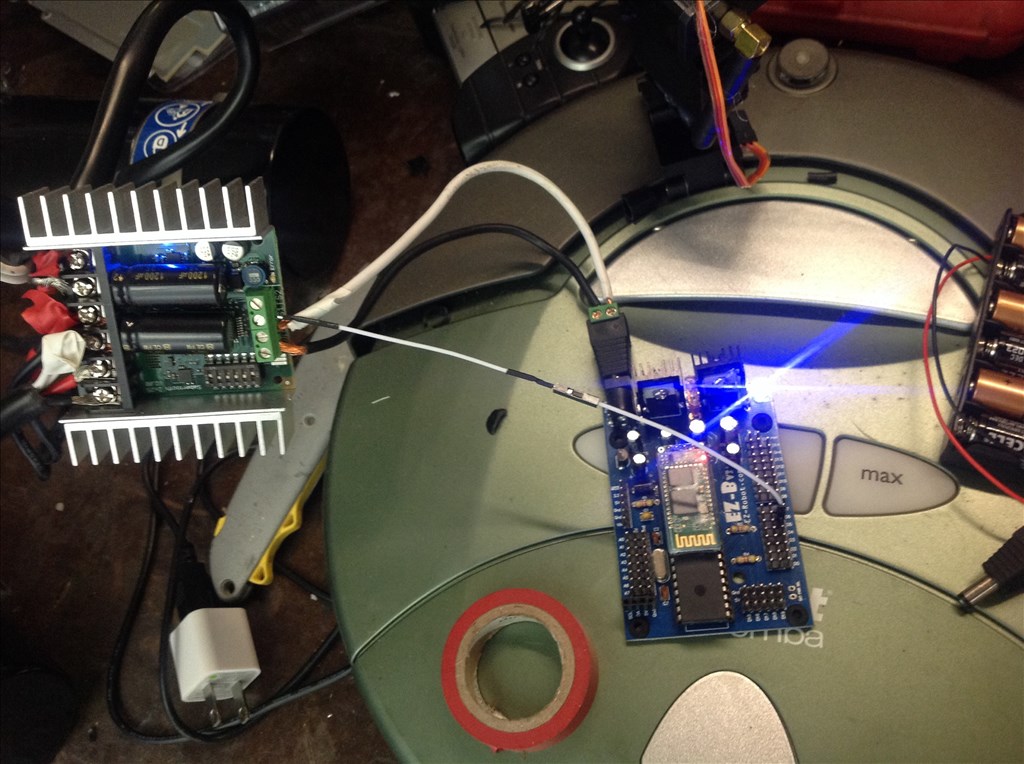
Hi all. First post. I got my ezb two Christmases ago to build a robot idea I had. Life happened and now I'm finally ready to build. I feel a bit daft as I'm able to get a few things right and others I'm not having success with. Here is the plan: a custom frame robot with two jazzy wheel chair motors and a third dead wheel for balance, the robot will follow a set path at a set time and return on the same path (assuming no obstacles) at a set time and plug itself in to charge. I rigged up a bare bones set up using the ez-b, a sabertooth 5x25 mc, two wheelchair motors with brakes removed and a 12 battery. I know my wires are currently sloppy but it was just a quick test. I got the ez-b connected wirelessly (using the gui)and powered from the 5v output on the sabertooth. I set the pins as described in other posts. I was able to get one motor turning forward and back using the ez-b virtual joystick (sabertooth) but it wouldn't stop turning. The other motor did not turn. Now, I know that I only had one signal wire connected to the ez-b but I'm not sure that it would support wires on different connectors. I also didn't see anyone else's diagrams powering the ezb via 5v from the mc. I've attached a basic diagram below. I guess my questions are: what would you recommend I change on my wiring? Can anyone advise as to what I need to add to accomplish the stated goals? I've read a ton of posts and forums and they've been helpful but I also really could use some friendly guidance from someone who's been there. I hope this made sense and really appreciate any and all assistance. Matt
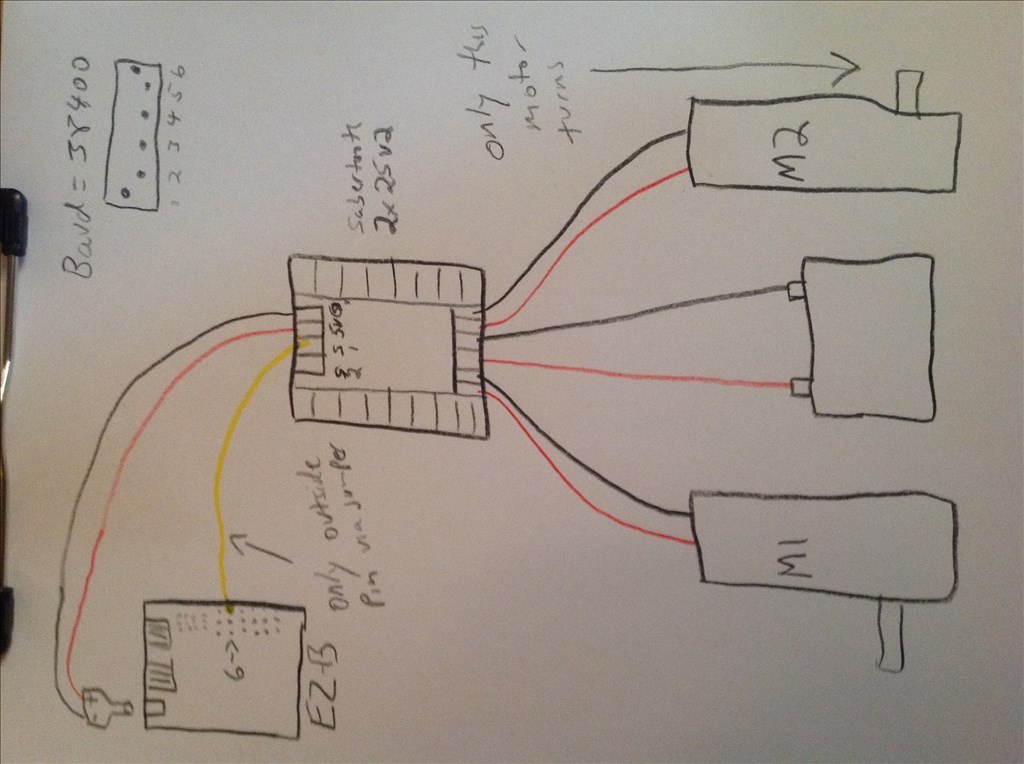

Ok so here is the update. Set switches to 1,3 & 6 on, the rest off. The ez-b gui has the correct settings on the sabertooth motor controller relating to two motors forward, rev, right, and left using 1-127 & 128-255 respectively there are no boxes for stop however. This may not be a problem but I cannot get the motor to stop turning (again, mine is a modified servo full 360 either direction) I plugged motor two into motor one slot and it worked couldn't get both to work together. It may be the sabertooth and in don't mind sending it back, I'd just like to be sure there is nothing I'm missing on ez-b before I do. I'm not utilizing signal 2 on the sabertooth, just s1 jumping to d6 on the ez. Since this is two motors am I supposed to use both? If so I only have the option to use one ez-b connection in the drop down. Hope this makes sense. I'm using Bluetooth if this matters. M
Sounds like you have everything correct (you confused me by calling your motors "modified servos". they are not. A modified servo is a different animal entirely, they are just motors).
Only thing you might want to try (and this doesn't really make sense with the symptoms) is to power your EZ-B independently rather than using the 5v BEC of the Sabertooth. The 5V BEC is only 1 Amp which is a little low for the EZ-B (although with nothing else being controlled should be sufficient) and the EZ-B actually runs a lot better on 7.5 volts than 5 (although again, shouldn't really be an issue with only one connection). If you do this, be sure to tie your grounds together or it definitely won't work.
The S2 is used when using the Sabertooth in R/C mode (you connect one signal to S1 and 1 to S2 and treat them as servos with a regular movement panel) but Serial mode has been much more reliable for users since DJ created the Sabertooth control panel.
Alan
Are you using the modified servo Movement Panel or the sabertooth movement panel? To stop both motors in a script you would use sendserial(D6,38400,0)
Ok so I contacted sabertooth and the lady said to set all pins on except for #4 and voila both motors spun free (albeit independent of ez-b control and I got the proper voltage from the s1 connections so I've ruled out sabertooth broken. Should I use a ground &5v wire to d6 along with the signal jumper I have now? I'm using the sabertooth controller on ez-b for movement with pins 1,3&6 on the rest off. Is there another pin setting I can try? I have not independently powered the board, I have to dig up some fresh batteries tomorrow. I'm sure this is an easy something I'm missing. Both components have been really well made and easy to use.
Any additional ideas?
Thanks Matt
one more update. I powered the ez-b separate from the sabertooth 2x25 and grounded properly. I also used two much smaller motors for grins. Still the same thing. Only one motor turns, the other does not. I tried a few different baud pin settings. Some would have the one motor spin when I clicked on stop or similar.
Has anyone had luck with other pin settings? I'm sort of at a loss.
thanks Matt
Have you tried using EZ=Script commands to make the motors start and stop? Something like;
If that works correctly then the problem is in the config for the Sabertooth Movement Panel. If it doesn't work then the problem is with the wiring or the setup of the Sabertooth.
The pin settings should be as shown on the Sabertooth help page. This should put the sabertooth in Simplified Serial mode with a baud rate of 38400.
It shouldn't make any difference but you could also try on a different digital pin, D0 for instance.
I thought that on the V3 board that only D0 was the serial port.
I have 2 sabertooth 2 x 5 controllers running (via serial script commands) just fine from ports D1 and D7 on my EZb 3 board...