mdeming1
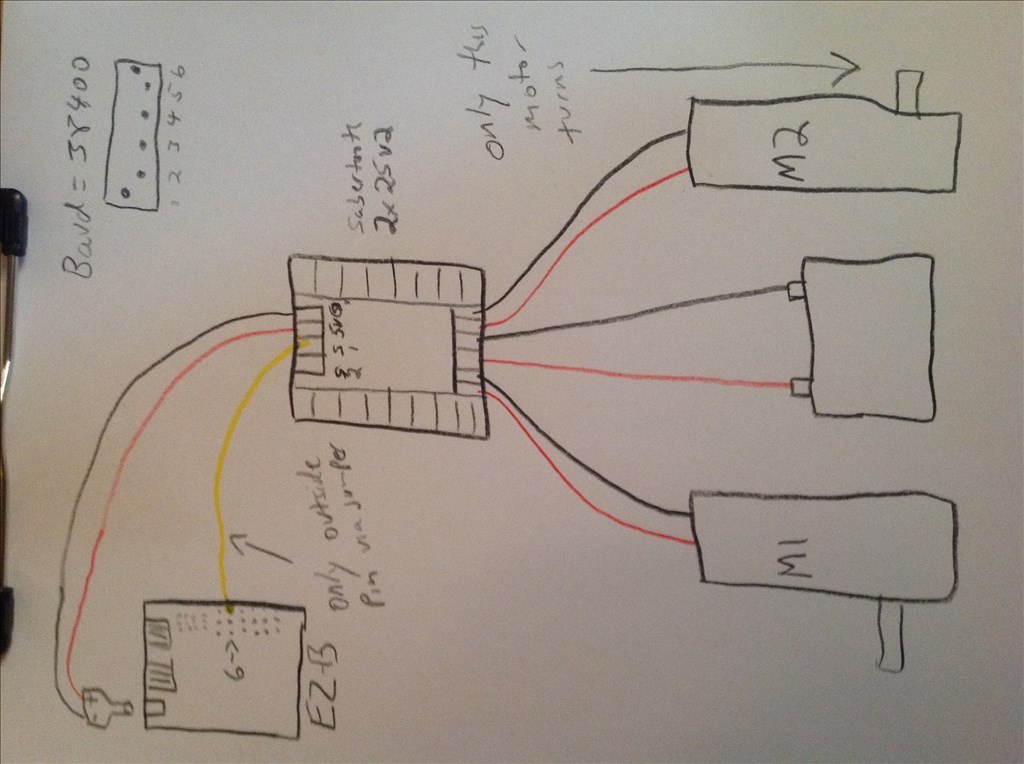
Hi all. First post. I got my ezb two Christmases ago to build a robot idea I had. Life happened and now I'm finally ready to build. I feel a bit daft as I'm able to get a few things right and others I'm not having success with. Here is the plan: a custom frame robot with two jazzy wheel chair motors and a third dead wheel for balance, the robot will follow a set path at a set time and return on the same path (assuming no obstacles) at a set time and plug itself in to charge. I rigged up a bare bones set up using the ez-b, a sabertooth 5x25 mc, two wheelchair motors with brakes removed and a 12 battery. I know my wires are currently sloppy but it was just a quick test. I got the ez-b connected wirelessly (using the gui)and powered from the 5v output on the sabertooth. I set the pins as described in other posts. I was able to get one motor turning forward and back using the ez-b virtual joystick (sabertooth) but it wouldn't stop turning. The other motor did not turn. Now, I know that I only had one signal wire connected to the ez-b but I'm not sure that it would support wires on different connectors. I also didn't see anyone else's diagrams powering the ezb via 5v from the mc. I've attached a basic diagram below. I guess my questions are: what would you recommend I change on my wiring? Can anyone advise as to what I need to add to accomplish the stated goals? I've read a ton of posts and forums and they've been helpful but I also really could use some friendly guidance from someone who's been there. I hope this made sense and really appreciate any and all assistance. Matt
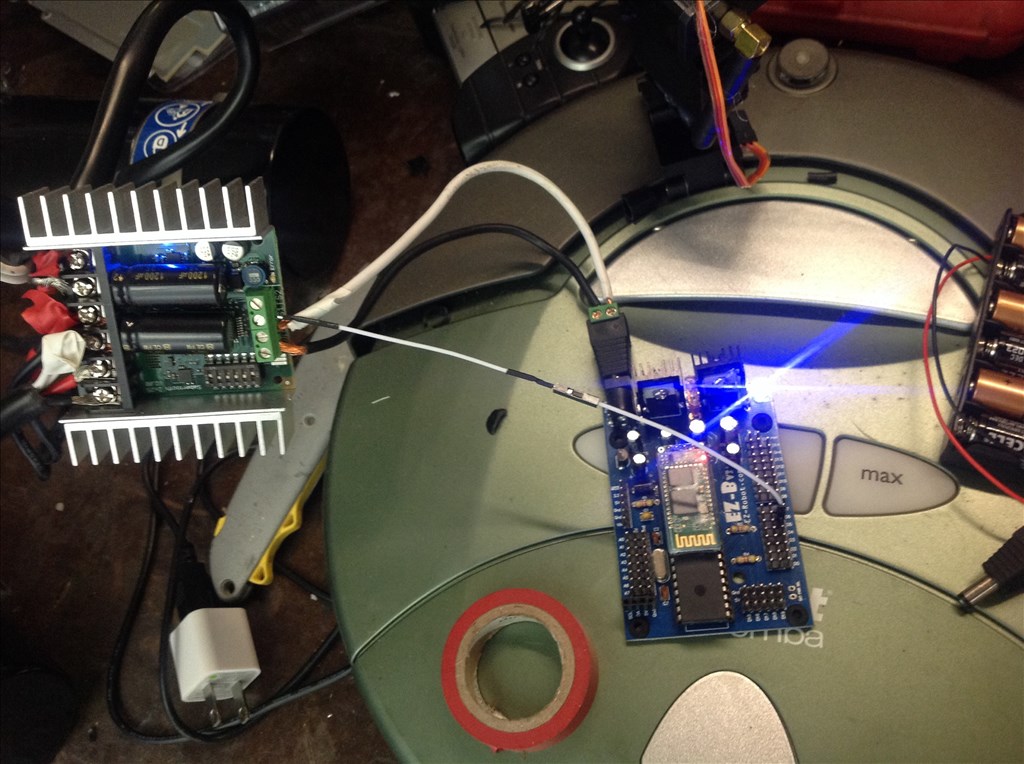

I don't know if you tried this, but you may want to try connecting each motor directly to the battery, one at a time to be sure that they both work. You might have a bad brush in the motor that is not turning. The wiring looks good from what I can see.
Good luck.
You know, I just blew up your picture and looked close at it; It looks like the second wire from the top isn't connected. It might just be the picture, but you may want to double check that.
@mdeming1
First I have neither the EZB or Sabertooth but here goes:
How you configure the Sabertooth depends on:
You have essentially 4 modes
Mode 1) Analogue Mode 2) RC mode Mode 3) Simplified serial Mode 4) Packetized serial
I believe and others can correct me that most people here use simplified serial or perhaps RC mode. I noticed that one entry on this page said https://synthiam.com/Tutorials/Hardware.aspx?id=26 said to use RC mode if you are using the Modified servo Movement Panel in ARC.
By RC mode I don't mean controlling the motors using an RC controller and receiver as apposed to serial or Bluetooth.
It really just means the Sabertooth will respond to RC type signals (pulses) just as if you were using servos. These RC type signals can come from a RC controller and receiver or a Microcontroller or anything else that could generate an RC type pulse.
If you use simplified serial you need to set the DIP switches correctly and based on the manual: 1,3,6 on rest off unless you use a lithium battery then 3 should be off it seems.
Per the manual:
"Switch 3 of the DIP switch block selects lithium cutoff. If switch 3 is in the down position as shown the Sabertooth will automatically detect the number of series lithium cellsat startup, and set a cutoff voltage of 3.0 volts per cell."
Also:
"Sending a character between 1 and 127 will control motor 1. 1 is full reverse, 64 is stop and 127 is full forward. Sending a character between 128 and 255 will control motor 2. 128 is full reverse, 192 is stop and 255 is full forward. Character 0 (hex 0x00) is a special case. Sending this character will shut down both motors."
Some of this information has been provided by others I just tried to combine it all.
Since I have neither devices currently I will let others who have used both provide more detailed answers.
One other thing:
Looking at your post again it says you used the joystick control.
Since I do not have an EZB or Sabertooth perhaps DJ or someone else can confirm but it looks to me like it might be sending servo pulses in that control.
If that is true I would think RC mode on the sabertooth would be needed.
The note to use RC mode is old. Use simplified serial for better EZ-B v3 support.
Alan
@thetechguru
Thanks for clarifying the RC versus simple serial question.
@mdeming1
If you set the sabertooth to simplified serial per the instructions and use just the sabertooth control in ARC does the motors work correctly then?
Hi all and thank you for all of your help. I was able to independently test the motor and it is good. I have not had the chance to get back to the robot to test the s.serial settings and probably won't until late tonight. I'll post back then and hopefully that will solve this particular issue. I'll let you know asap. Matt