
mdeming1
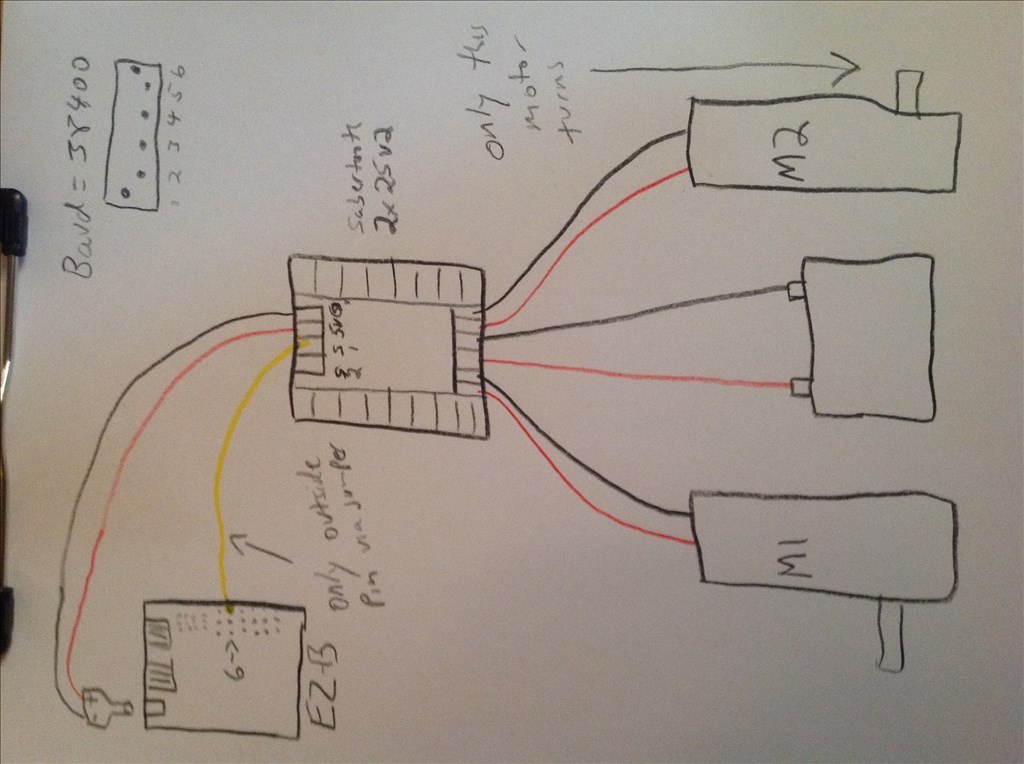
Hi all. First post. I got my ezb two Christmases ago to build a robot idea I had. Life happened and now I'm finally ready to build. I feel a bit daft as I'm able to get a few things right and others I'm not having success with. Here is the plan: a custom frame robot with two jazzy wheel chair motors and a third dead wheel for balance, the robot will follow a set path at a set time and return on the same path (assuming no obstacles) at a set time and plug itself in to charge. I rigged up a bare bones set up using the ez-b, a sabertooth 5x25 mc, two wheelchair motors with brakes removed and a 12 battery. I know my wires are currently sloppy but it was just a quick test. I got the ez-b connected wirelessly (using the gui)and powered from the 5v output on the sabertooth. I set the pins as described in other posts. I was able to get one motor turning forward and back using the ez-b virtual joystick (sabertooth) but it wouldn't stop turning. The other motor did not turn. Now, I know that I only had one signal wire connected to the ez-b but I'm not sure that it would support wires on different connectors. I also didn't see anyone else's diagrams powering the ezb via 5v from the mc. I've attached a basic diagram below. I guess my questions are: what would you recommend I change on my wiring? Can anyone advise as to what I need to add to accomplish the stated goals? I've read a ton of posts and forums and they've been helpful but I also really could use some friendly guidance from someone who's been there. I hope this made sense and really appreciate any and all assistance. Matt

I can confirm I have successfully used Port D14 for sending Serial commands to my LCD displays (my LCD examples project uses D14). These were at a baud rate of 9600.
I have also used D8 on my TellyMate examples, these were a baud rate of 57600.
While I don't have projects to confirm it, I do know (from memory) that I have used a whole range of digital ports for serial communications and not had any issues. To put it bluntly, I never really cared which port I plugged in to. The only serial issue I experienced was twitching servos (on other ports) when sending serial commands to my first LCD display (on both EZ-Bs I have and on multiple projects), I do not know if this was fixed as I changed the LCD to I2C so I didn't have to deal with the problem
I know D0 is the only port which had the ability to communicate at a specific baud rate...
Reading this post DJ explains baud rates a bit. Basically, the V3 maxes out at 57600 for all 20 ports with the exception of D0 which can do 115200. So if your baud rate was set to higher than 57600 this would explain why it wasn't working on anything but D0. If it was below 57600 then we are still none the wiser.
As mentioned earlier, my sabertooth(s) work on other pins (not just D0)... but I am only using 34800 as a baud rate...
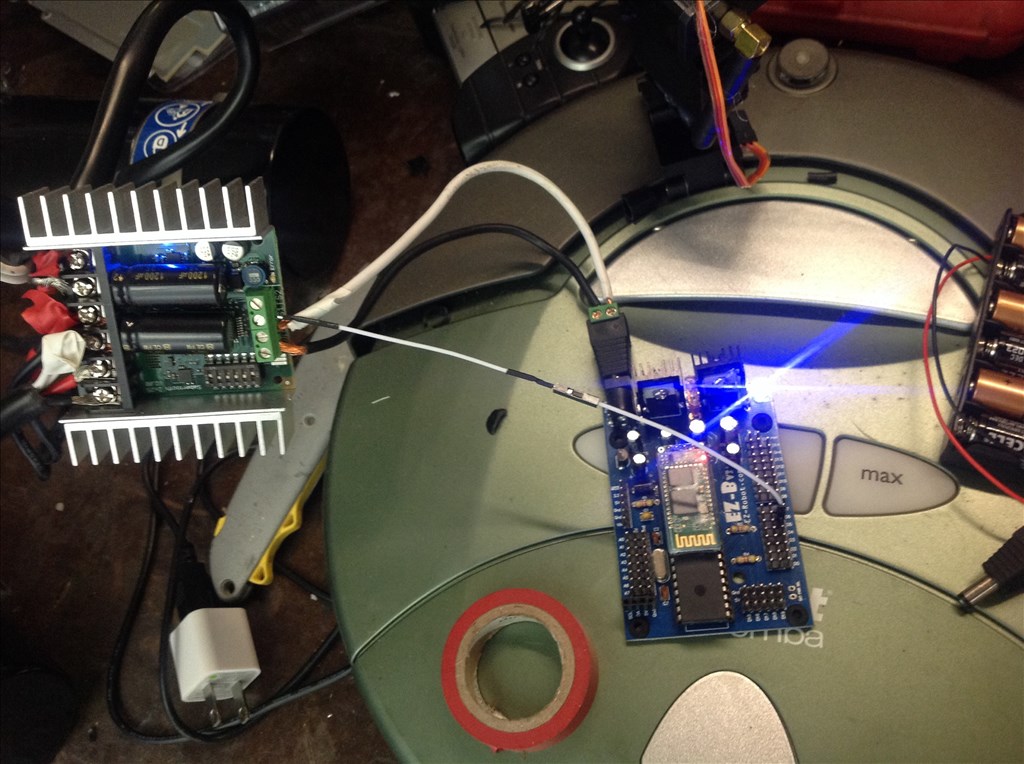
For reference I'm posting photos of my V3 board. I was using the 38400 baud rate with the ez-b sabertooth interface (for sabertooth 5x25). It wasn't working both motors until switching to DO. The ez updated says my firmware is up to date.
Sorry for the wires. After solving the issue I had I decided to do my other functionality experiments on a smaller platform first so I got out an rc car and a smaller sabertooth [edit, this is not a sabertooth! it is an L298N chipset 2.5 amp motor controller available from ez robot store] had ordered from ez-b way back when and never opened. Haven't tested it out yet.
@mdeming1... Good to hear... but that's not a sabertooth in the above picture... Looks like an H-bridge of some sort...
You're absolutely right, my mistake. There is a name for it, I bought it from EZ Robot and DJ has a control program for it. I'll find the name and edit. Thanks Matt
Edit here and above: the controller is an L298N chipset 2.5 amp motor controller available from the ez robot store