mdeming1
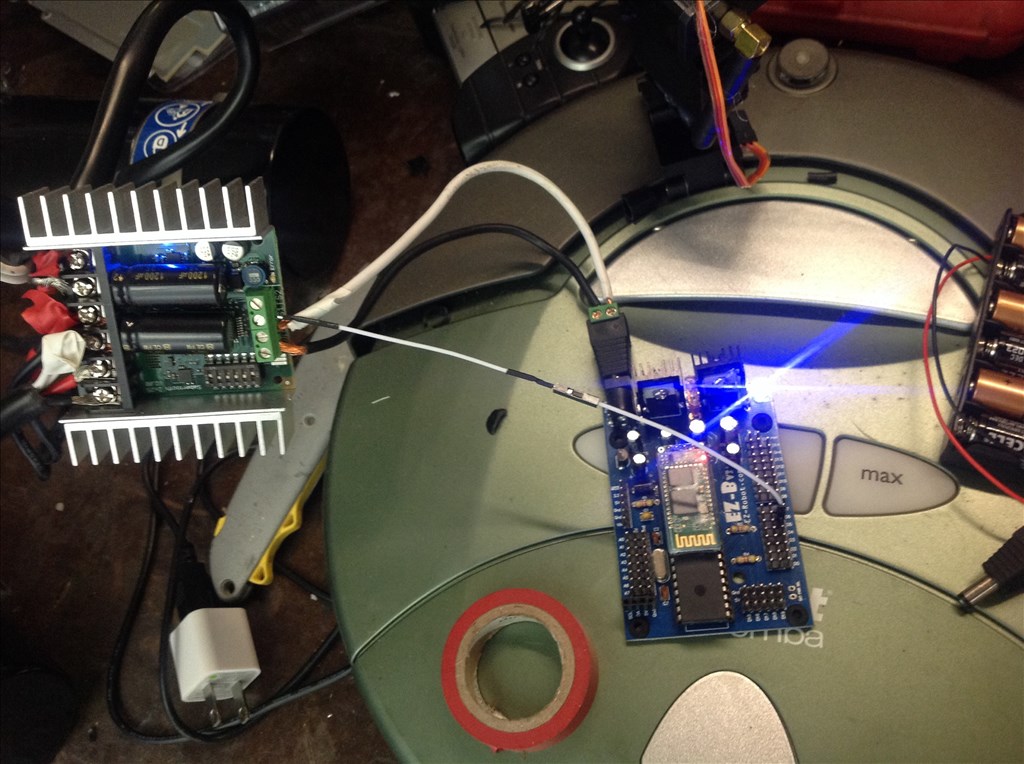
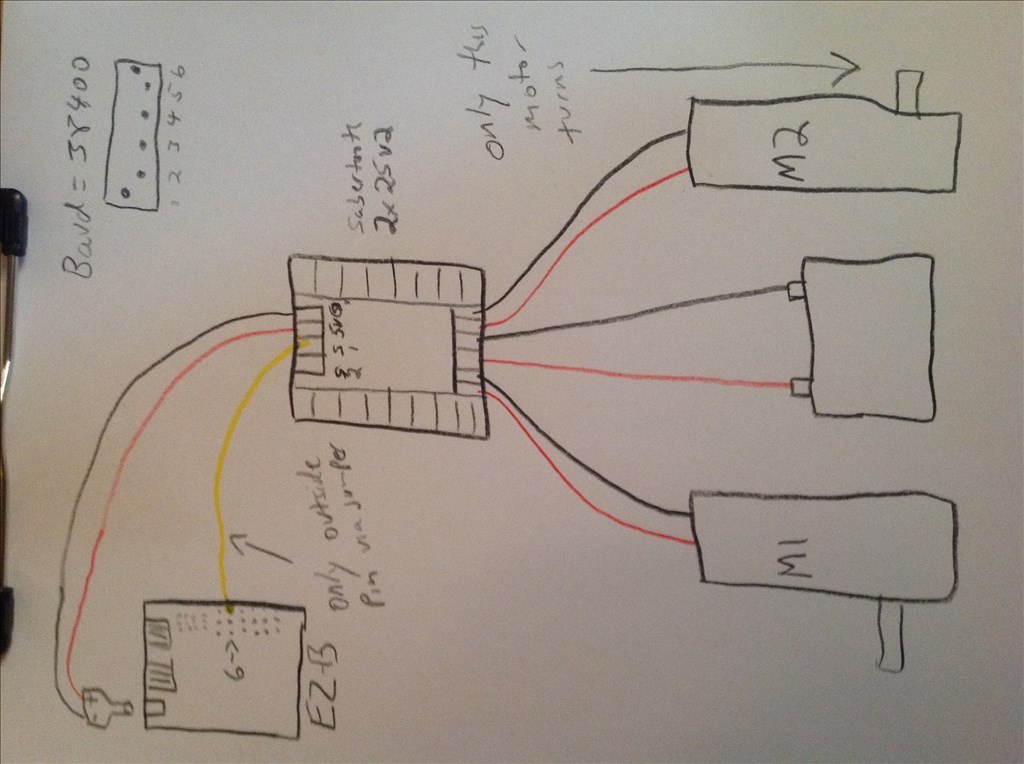
Hi all. First post. I got my ezb two Christmases ago to build a robot idea I had. Life happened and now I'm finally ready to build. I feel a bit daft as I'm able to get a few things right and others I'm not having success with. Here is the plan: a custom frame robot with two jazzy wheel chair motors and a third dead wheel for balance, the robot will follow a set path at a set time and return on the same path (assuming no obstacles) at a set time and plug itself in to charge. I rigged up a bare bones set up using the ez-b, a sabertooth 5x25 mc, two wheelchair motors with brakes removed and a 12 battery. I know my wires are currently sloppy but it was just a quick test. I got the ez-b connected wirelessly (using the gui)and powered from the 5v output on the sabertooth. I set the pins as described in other posts. I was able to get one motor turning forward and back using the ez-b virtual joystick (sabertooth) but it wouldn't stop turning. The other motor did not turn. Now, I know that I only had one signal wire connected to the ez-b but I'm not sure that it would support wires on different connectors. I also didn't see anyone else's diagrams powering the ezb via 5v from the mc. I've attached a basic diagram below. I guess my questions are: what would you recommend I change on my wiring? Can anyone advise as to what I need to add to accomplish the stated goals? I've read a ton of posts and forums and they've been helpful but I also really could use some friendly guidance from someone who's been there. I hope this made sense and really appreciate any and all assistance. Matt

Thanks for that info Richard R I will update my mental notes.....
D0 is the only port that can drive a particular H-bridge. I believe the BV1113 or something similar (it is the one EZ-Robot used to sell before they started selling the much better 2.5amp h-bridge listed in the store now).
Alan
Firmware updates have improved the EZ-B V3. Some were before my time with the EZ-B however I can confirm that all 20 digital ports are capable of Serial Communication.
I haven't used script. I'll try to paste that program in later and let you know what happens. I'll also post another photo just to be sure nothing on my end is being missed. i'm positive this is user error of some sort on my part. I really appreciate everyone's patience helping me out.
more later. Matt
Well, the script didn't work so I played with it some more and used D0 and everything worked fine, go figure. I initially used D6 because I think I saw someone elses project or maybe a tutorial using D6. Supposedly my firmware is up to date but I'm a pretty early adaptor of EZ-Robot so it is probably an old board. It's funny. I got the EZ-Robot kit for Christmas two years ago and set to work on the Roomba. Unfortunately I got a random bad battery pack. Ez-Robot replaced it straight away (great customer service) but I had other projects come up in the meantime and had a devil of a time with the ps2 connector because A) I'm a bad solderer and B) all the old mouse ps2 connectors I had were covered in epoxy that made it difficult. I'm proud to say that I ordered two custom ps2 wires to get that Roomba robot project going sometime! Meanwhile, this current robot is the whole reason I got the board in the first place. I'm hoping to implement:
Map following IR control Action to take a certain times (a clock or date time function)
I'm going to see what I can do to add these functionalities and I'm certain i'll need your assistance again. I really appreciate everything. Not sure why only D0 works but i'll take it.
best Matt
I can only choose one resolver but since this was a group effort i'll offer thanks for resolution to: Rich Richard R Darathian Danger! thetechguru RobotDoc
Thanks for not giving up on my issue.
Thanks for clearing this thread up. I've got 3 V3 boards and none of them will spew out sendSerial commands on any port but D0. Of course my V3 boards are somewhere between 2 and 3 years old.
EDIT*
The D0 port testing I did on all 3 EZ-Bs was confined to the 57,600 and 115,200 baud Roombas. The Roomba commands will not work on any other digital ports on any of my V3s. I have the latest firmware flash on all three boards.
Both of my V3s will send serial commands on any port, at least to my serial LCD displays.
I never looked in to it much as it is something I cannot afford to get interested in but D0 is the only port the Roomba can use and I believe it may be due to the baud rate (I can't afford to get in to the whole Roomba thing as they are ridiculous money over here). However, @Anthony is using multiple Sabertooth's (Saberteeth?) with Lexi and I believe @Dave may also be using multiple Saberteeth on his B9 (I may be wrong on that one) so they should work on any Digital port.
FYI, if you use the latest ARC you are forced to upgrade to the latest firmware too. As far as I know all V3s are pretty much the same (other than a few minor component changes) so all should use serial the same way. I will add checking serial and baud rates etc. on all 20 ports to my to-do list, it'll be a fun little project and be something to break up the mundane list of tasks I an fighting with currently
Glad it's sorted now though. As for the other questions, feel free to ask. Search the forums too, the time based one has been discussed/explained previously (however if you can't find it or need more specific help it's no issue, we are here to help).
Actually I'm only using one Sabertooth per EZB and I do have it attached to D0. Purely by chance. If I remember correctly I was having problems with the Sabertooth responding to serial commands at first and I had it connected to a different port. When I moved it to D0 I think that's when I started having success. I thought it was because I got the script right. It may have just been that I accidently plugged it into the only port that will send serial commands. blush However like @Rich I need to confirm this.