mdeming1
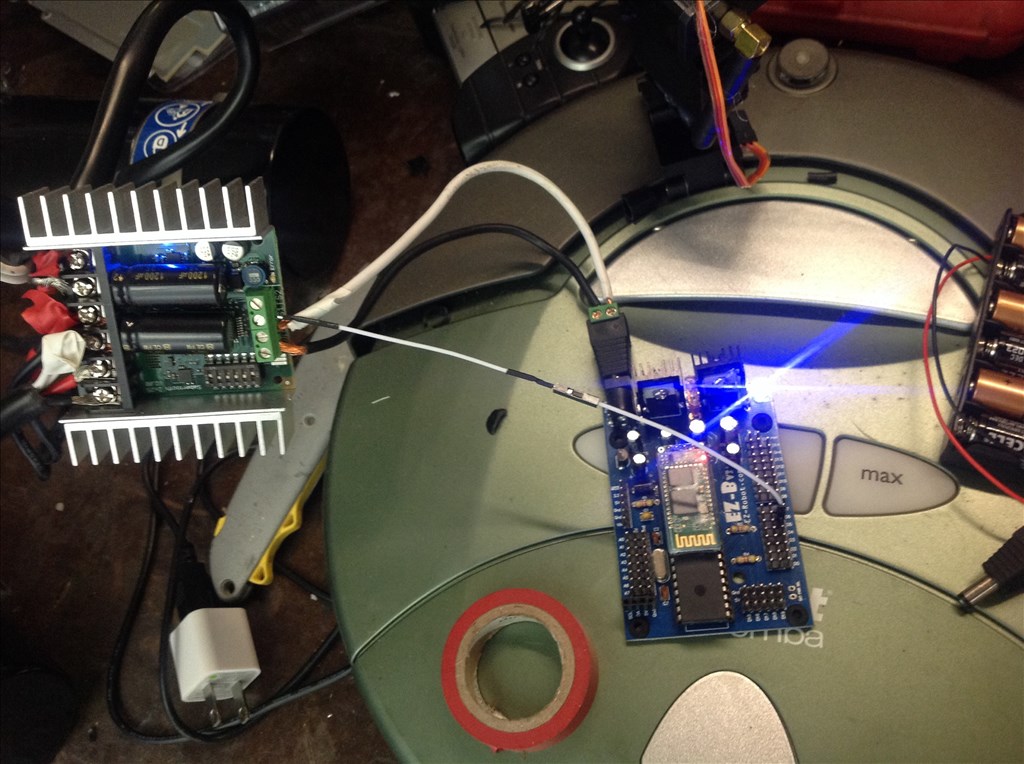
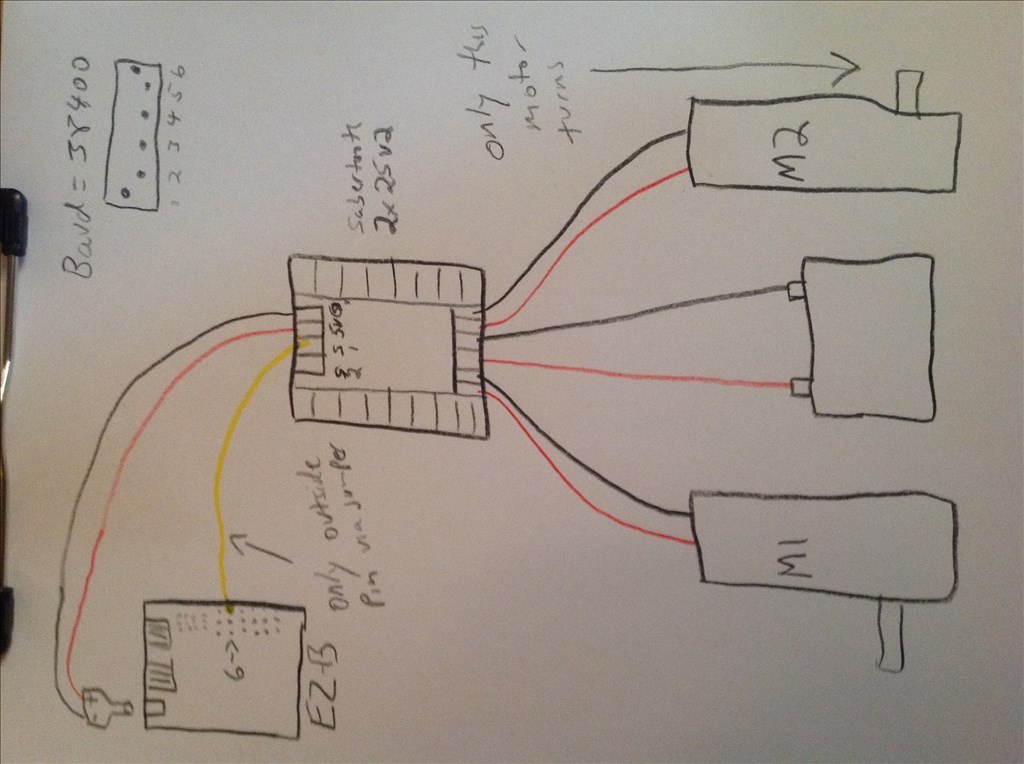
Hi all. First post. I got my ezb two Christmases ago to build a robot idea I had. Life happened and now I'm finally ready to build. I feel a bit daft as I'm able to get a few things right and others I'm not having success with. Here is the plan: a custom frame robot with two jazzy wheel chair motors and a third dead wheel for balance, the robot will follow a set path at a set time and return on the same path (assuming no obstacles) at a set time and plug itself in to charge. I rigged up a bare bones set up using the ez-b, a sabertooth 5x25 mc, two wheelchair motors with brakes removed and a 12 battery. I know my wires are currently sloppy but it was just a quick test. I got the ez-b connected wirelessly (using the gui)and powered from the 5v output on the sabertooth. I set the pins as described in other posts. I was able to get one motor turning forward and back using the ez-b virtual joystick (sabertooth) but it wouldn't stop turning. The other motor did not turn. Now, I know that I only had one signal wire connected to the ez-b but I'm not sure that it would support wires on different connectors. I also didn't see anyone else's diagrams powering the ezb via 5v from the mc. I've attached a basic diagram below. I guess my questions are: what would you recommend I change on my wiring? Can anyone advise as to what I need to add to accomplish the stated goals? I've read a ton of posts and forums and they've been helpful but I also really could use some friendly guidance from someone who's been there. I hope this made sense and really appreciate any and all assistance. Matt

Check the settings of the Sabertooth movement panel.
The Sabertooth uses 1-127 for motor 1 and 128-255 for motor 2 with 0 being used to stop both motors.
So set motor 1 full forward as 127, full reverse as 1, motor 2 full forward as 255 and full reverse as 128 with the relevant forward and reverse values for left and right turning.
Your wiring looks correct from what I can see.
I was never able to power my EZ3 board with 5V... Maybe I never had enough current? Not sure... Anyway, do you have the dip switches set right for serial communication on the Sabertooth? I am using 1,3 6 ON the rest off... I am also using a SLA batt and not a Lipo or Li-ion...
Ah good catch, I missed that part of his sketch.
Simple Serial is as so (according to the manual);
Yep, 1,3,6 on and the rest off give you 38400 baud not using a Lipo or Li-ion battery...
Besides setting the DIP switches correctly also keep in mind the BEC in the Sabertooth supports a max of 1 amp.
Also I noticed the EZB docs says:
EZ-Robot suggests connect Sabertooth Motor Controllers in R/C mode. This allows the user to control the motor speed and direction with the Modified servo Movement Panel.
Thank you for getting back to me. I had zero problems getting the ez-b to power from the 5v output, I was somewhat concerned about just using the one white wire jumper rather than a black,red,white connector but you're both saying that seems ok.
I simply set the switches according to this post in tutorials:
https://synthiam.com/Tutorials/Help.aspx?id=173
showing this image:
I will change to the 1,3,6 on settings you referred to. I do have a question for you Rich, your image seems to show just the 2 as being off. Is this an additional setting or do you both think 1,3,6 will run both motors assuming I check and confirm the motor settings as Rich mentioned in the first reply?
I have to tell you I've had a heck of a time with micro controllers in general and the ex-b and your responses have just been really user friendly and I appreciate it.
If the above are correct can I ask how i'd go about finding ez-b information about setting a path without a line then programing the robot to follow it at a certain time? It will always be the same path assuming no obstacles to skirt.
I have many other components I can use from the ez robot kit and other items I have around.
Matt
Sorry Darathian, I replied before reading your responses.
By removing the brakes on the large jazzy motors I understood that I have effectively made them continuous rotation servos, is this not correct?
The tutorials I saw mentioned simplified serial but if RC is the way to go over bluetooth I guess I can do that, would it change the above recommendations?
As for the BEC output. Would you advise I add an external BEC? I'd like to avoid another battery pack since there is plenty of power from the motor batteries.
I'm also over my head some so please correct me if I'm looking at anything incorrectly.
Thanks again. M
PS: I should add that the Roomba is there just by coincidence. I'm still having a time with the ps2 connector project for that.