
CMC206
USA
Asked
— Edited
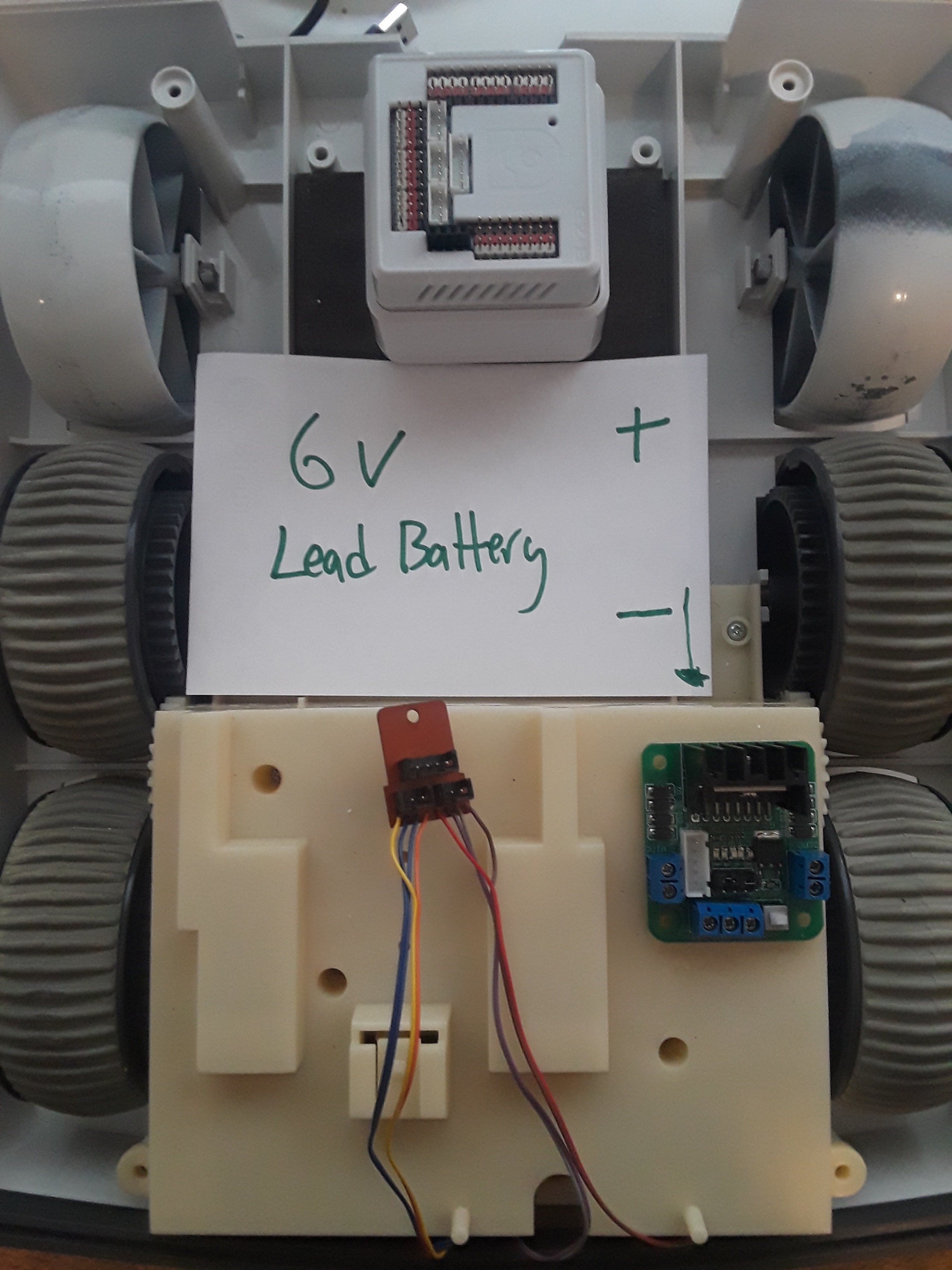
I have taken a couple of years off of this omnibot 2000 build. I kind of get stuck, frustrated and quit. Then every no and then I comeback and look at it again. I have watched a lot of the videos people/bot have recommended and I'm still stuck. Mostly this is because I'm not an electrical engineer...LOL I know how to take things apart and monkey with stuff. I can solder and follow instructions but this project has stalled. My main issue is that the videos go to fast and are not detailed enough for my limited knowledge. So here is where I'm at. How do I wire the hbridge to the ezb and battery and how do I wire the 8 motor wires to the hbridge? Here are a couple pictures to show what I have going. Thanks in advance for any advice.

Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skills (view all robot skills)

EZ-B V4 Info
by Synthiam
Displays EZ-B v4 internal temperature and battery voltage, shows built-in battery monitor and LiPo protection settings in Connection Control.

Dual Hbridge
by Synthiam
Two-channel Dual H-Bridge movement panel to control two DC motors (on/off) for forward, reverse, left, right via EZ-B digital ports; no PWM speed.

Wow. That's crazy. DJ you are a Genius! I shifted dude into second gear and now he mosies a lot better!
I got our omnibot moving really nice now. I have put the body back together as much as possible. I still have work to do with the eyes and getting some LEDs to blink is my next goal. Right now I decided to try the ultrasonic radar scanner. I have it hooked up right I'm assuming. It shows some red dots when things are in front of it. The other 2 collision avoidance and distance both show numbers going up and down so I'm assuming they are working as well. I have tried using all 3 together and each separately to no avail. When you put your hand in front of it the scanner stops moving. However, the bot doesn't stop or move or avoid anything. What could we be missing?
Thanks!
Thankks
Hi @CMC206,
A couple suggestions for you:
You can use the Ultrasonic "Collision Detection" control to stop the Omnibot if it detects an obstacle that meets the threshold value to you have setup in the control's settings. You will still have to initiate the move forward command, and then decide what you want it to do after it stops.
For the Ultrasonic "Distance" control, this is merely a readout of the distance value, it will be up to you to write a script using GetPing(D22, D23) to get the Ultrasonic distance value and decide what to do with it.
For the Ultrasonic "Radar" control, this is a readout of the distance value with a panning servo attached, it will be up to you to write a script using GetPing(D22, D23) to get the Ultrasonic distance value and decide what to do with it. You can also monitor where the servo is at with GetServo(D0) and make a decision based on where it's at.
For more information on these controls definitely click the '?' in the corner of each control or just search for the controls in the Product section
So I went back to the drawing board and realized I had more than a few pins and controls wrong. I worked on this all day today switching the pins and hbridge motor connections. When I pushed the forward button he would go backward. I figured it out when he went backward and the radar started working so I started flipping pins on the motor ports on the hbridge. After trying all different combinations on that with no success I reversed the 4 pin order on the hbridge and he went in the right direction and started to do collision avoidance. So now we are going to try and add in some voice control. We are still not sure how to go about the LEDs for his eyes. I was looking at the mblink leds but they are on backorder or 33 bucks a piece on Amazon. We need help with this. We would like to have the eyes blink every few seconds to give a life-like appearance and it doesn't matter if its just one color. We have tried hooking up LEDS and every time we do they burn out. If someone could point us in the right direction in VERY LEMANS TERMS ( what LEDS to buy, pins on the ezb to connect to, and what control to use) that would be great! We have searched all of the tutorials and manuals for this but still don't know what to do. We are pretty stoked to see him move about with a basic level of autonomy. Thanks again in advance for all of the suggestions and help. We are finally starting to achieve real progress on this project we started over 2 years ago and it is giving us the motivation to keep trying and go further.
Chris, Carson, OBA2K
You need to solder in a resistor on the led to avoid blowing it.
I just ordered a few of these:
https://www.parallax.com/product/28085
Says they are at 5 volts so I don't think I need a resistor?
I was thinking I could use the Ic2 ports and the RGB control?
Never used those. I can only speak from experience using 5v blue leds with some resistors.
@CMC206 Regarding https://www.parallax.com/product/28085 I don't see I2C anywhere, did you emailed/asked parallax ?