
Asked
— Edited
Moving ARC And Robot To New Wifi Network.
I'm moving a robot with 3 EZB's controlled through ARC on a laptop to a completely different WIFI network. I had everything running correctly on the first network with ARC on the laptop communicating nicely to the EZB's in the robot. They are in Client mode.
My question, Is there a simple way to get the EZB's to attach to a new WIFI network without doing a reset on them? I'd like to be able to get into their web interface and make the network name and password changes directly if possable.
The reason I don't want to do an ezb reset is because two of them are hard to access.
Thanks!
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

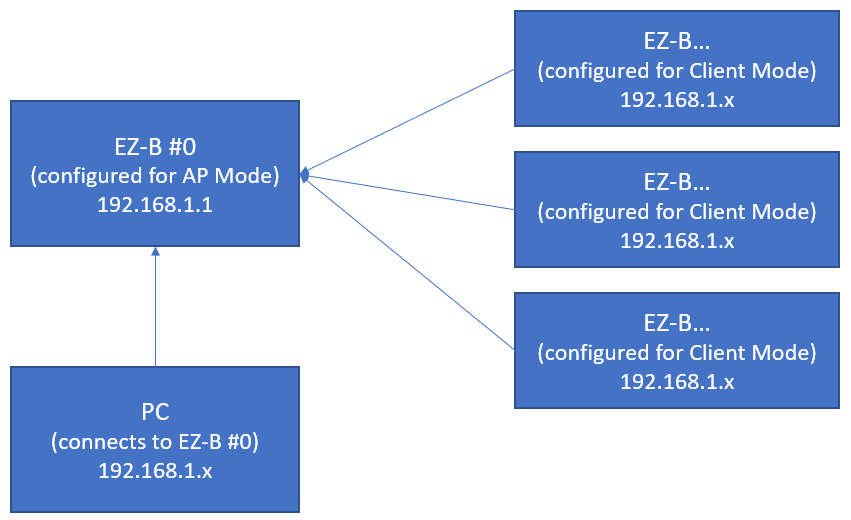
If you have one EZB in AP Mode and the other EZB's in client mode and pointing to the first as a connection point (access point) your home network router is no longer in the picture. If this is the case the home router will not handle the EZB's even if you have previously set them up in it with a static IP addresses. The EZB does not remember IP addresses of devices continually connecting to it or has the ability to set static IP addresses.
To get EZBs set in client mode to connect to a AP mode EZB you needed to go into the client mode EZBs Web interface and point them to the AP mode EZB's SSID.
Like mentioned before a V4 EZB or IoTiny set in AP mode can't remember IP addresses between shutdowns so each time a set of devices connect to the AP mode EZB it will reassign new IP addresses. This mucks up how the client mode EZB's are handled in ARC because it uses set and stored IP addresses from the setup process to ID each EZB.
I have successfully set up three EZB v4/2's and one IoTiny in my B9 like I had planned in post #14 above. It works beautifully. Only the Rock Pi X has access to my home network for internet connection. I shut down my internet connection for the ROCK Pi and everything still runs and connects perfectly between the EZB's, SBC and ARC. I'm thrilled. The only drawback is that if I ever lose internet connectivity the ARC Skills that depend on it like Bing Voice Recognition will not work. That sucks because VR is how I mostly control my robot.
By only having one EZB in client mode connect to the one EZB in AP mode there is no wrong IP assigning issues. The AP mode EZB will always assign a IP address to the client mode device connecting to it one number higher. For example the default IP AP mode address of a EZB is 192.168.1.1. The first device that connects to it at bootup will be assigned 192.168.1.2.
Wouldn't it be wonderful if EZ Robot would release a new version of the EZB with the ability to remember IP addresses of previously connected devices like a real router does? The ability to add static IP addresses would be a bonus. EZ Robot contacted me last week asking for money to help generate new revenue so they could expand and upgrade their offerings. They said in the email I could "Own a part of EZ Robot". Hopefully they will be successful in finding this needed revenue and implement a upgrade to the EZB to be able to remember IP addresses.
Thank you both for your feedback. I’m going to leave on EZB4 AP and one IoTiny in client mode. The rest will us an USB Arduino’s connected to my Rock Pi X.
Curious how much ez-robot would need ; maybe crowdfunding? Unless Dave was jesting.:)No not jesting. here's the text of th emessage:
Exclusive Invitation to Own a Piece of EZ-Robot Hello David,
I wanted to take a moment to offer you a unique opportunity - to own a piece of EZ-Robot.
EZ-Robot is the world’s most powerful, versatile, and easy-to-use robotics platform, and we’re giving our community, supporters and educators a chance to invest in the company.
Within the next couple of months, we’ll publicly announce a crowdfunding campaign to raise $1.2 Million. This capital will allow EZ-Robot to develop exciting new products and hardware, create new projects and curricula, as well as accelerate our impact worldwide. Forecasts are projecting very strong growth in the robotics industry over the coming decade. By investing in EZ-Robot, you will own part of that growth.
If you’re interested in learning more about this exciting opportunity, register below, and we’ll send you more information.
LEARN MORE ABOUT OUR INVESTMENT OPPORTUNITY Thank you to all of you who have supported us with your enthusiasm and passion over the few years. On behalf of the entire EZ-Robot Team, I’m excited to provide you with an opportunity to share in our future.
Regards,
-Dennis
CEO
EZ-Robot
Please Note: We won’t be sending out additional emails about this investment opportunity, until we are about to launch so if you’re interested in learning more, it’s important to click the link above to receive more information.
@Dave I am guessing you answered yes to the question in the EZ-robot survey that went out 2 weeks ago. Are you interested in investing in ez-robot?
https://synthiam.com/Community/General/EZ-robot-building-a-new-platform-21135
I don't have any information about the survey or new products. I'm guessing Jeremie has some new hardware goodies planned?
I am guessing @jeremie is under NDA or he would have shared. We know he reads all the threads.
@DJ when you created ez-robot there was nothing on the market like it. Now the market is pretty flooded with educational robots. This will be a hard market to expand in now.
if I was going to jump in I would probably partner with someone who has a solid software robotics platform so I am not reinventing the wheel. From a hardware perspective there has been a lot of evolution.
Primary core I would probably base my design on a primary core on ESP chips and a low powered low cost CPU. They are cheap and DIY can always run basic arduino code on ESP if they want. Problem is they are hard to wire for a novice. Especially when you have device conflicts and spaghetti wiring on bread boards.
Secondary cores I would then have Secondary cores that are just ESPs and an interface to connect peripherals.
No wires I would probably look at models like clic bots, these are garbage and break easily but the concept of no wires is good. Even today I still plug cables in back to front on an EZ-B and spend time finding and reconnecting wires that come unplugged.
Peripherals For peripherals I think a common bus backplane would be ideal with an open interface that any peripheral can connect with. Why do I have to wire in a sensor like a LIDAR it should just magnetic connect and all the wires are magnetic and only connects one way. For a servo same thing just magnetic attach and attach another one to the first one. Sure allow for thumb screws etc for a more permanent connection but this needs to just snap on to play.
Smart Peripherals I would put unique identifiers on each peripheral so the primary core knows what devices are installed and appropriate skills to load. we can also use this to know if we have genuine or fake components (blockchain)
Batteries Batteries are important and need to be sized for the project so I would give each core and peripheral a number. I would have a battery module with a number on it so you just add up the numbers on the peripherals and add battery modules so their total numbers are higher than all the peripherals. Since peripherals are smart we can have the core compute if we have enough battery modules to power robot.
Robot if you can make a primary core, secondary cores, magnetic battery / expansion modules so you just add additional sensors, actuators and peripherals as you need them. They all talk back via the bus (or wirelessly for simple robots) to the primary core.
open standard I would then publish an open standard and 3D printed connectors so third party companies can join my eco system. Yeah others will copy your primary and secondary cores but the software could be locked down to only work with your core devices.
I was today years old when I finally understood the whole connect to one EZ-B in AP mode and others can be connected through it via client mode. This is an amazing option!
I agree. I just wish there were a way to use this option with more then one EZB in client mode attaching to the AP mode EZB. Like mentioned above the AP mode EZB cant remember previously attached devices and gets them mixed up at the next power up. Still it's a really cool feature although limited.