Asked
— Edited
Moving ARC And Robot To New Wifi Network.
I'm moving a robot with 3 EZB's controlled through ARC on a laptop to a completely different WIFI network. I had everything running correctly on the first network with ARC on the laptop communicating nicely to the EZB's in the robot. They are in Client mode.
My question, Is there a simple way to get the EZB's to attach to a new WIFI network without doing a reset on them? I'd like to be able to get into their web interface and make the network name and password changes directly if possable.
The reason I don't want to do an ezb reset is because two of them are hard to access.
Thanks!
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

OK. maybe I'm slow or overthinking. LOL.
Maybe it will be as easy as clicking on the Discover button in the Connection control and letting ARC search for the EZB's broadcast signal.
An ez-robot ezb v4 can't be scanned for if it isn't connected to a wifi network
You'll have to keep the original wifi network online, connect to the web browser settings of each ezb, and change them to the new wifi network.
Connect to the web browser config of each ezb on the original network, and press the option to reset the ezb. There's a reset to defaults button in the newer /2 ezb's
Press the reset button on the ezb and start from scratch
The ez-robot ezb needs a wifi network to access the configuration screen because that's how the network works. It needs an IP address which requires a wifi connection, if that makes sense?
Thanks so much @ DJ. Just what I needed to know.
Attaching to the old network is not an option at this point. So, I guess a reset is called for.
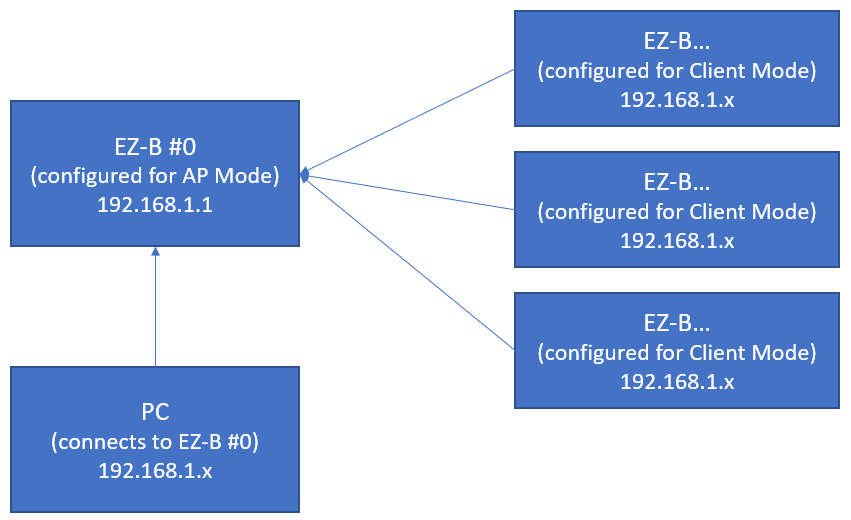
Have you thought of connecting the ezbs together in a mesh network? And then you only need to connect to one AP mode ezb. Check this: https://synthiam.com/Support/Tips-to-Make-a-Robot/Multiple-EZ-B-over-WiFi
I have been want to try this.
Instead of AP mode on the first EZB can I attach it directly with USB to an onboard Rock Pi X and still Wifi to the other EZB's with them in client mode?
No - that would be neat if you could.
If you're considering USB, then make them all usb. They'd each need a USB UART adapter, but that's easier to maintain than a bunch of wifi networks.
Ugh. After reading the EZ Robot site I figured this was the case. All my EZB's are in different levels of the robot that spin and bob. I really don't want to run cables through those areas. Wifi seemed like the best answer at the time. Then I kept reading about the USB connection directly to a computer being the fastest and most stable. I was hoping to take advantage.
Looks like I need to brainstorm this. Maybe an onboard router also but the EZB could do that from what I see.
Yeah, the ezb would do the same as an onboard router and use less power.