
Asked
— Edited
Moving ARC And Robot To New Wifi Network.
I'm moving a robot with 3 EZB's controlled through ARC on a laptop to a completely different WIFI network. I had everything running correctly on the first network with ARC on the laptop communicating nicely to the EZB's in the robot. They are in Client mode.
My question, Is there a simple way to get the EZB's to attach to a new WIFI network without doing a reset on them? I'd like to be able to get into their web interface and make the network name and password changes directly if possable.
The reason I don't want to do an ezb reset is because two of them are hard to access.
Thanks!
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

@DJ. This maybe a dumb question; hoping you can help with my confusion about your post#4. using a mesh network. I’m using 2 Wi-Fi’s one on my rock pi x and USB wifi for my second wifi connection.
Can I use my second wifi to connect to the internet and can the wifi EZB’s also use my first wifi internet connection?
Hope this makes sense.
thanks in advance.
Yes, exactly. See this support manual document: https://synthiam.com/Support/Tips-to-Make-a-Robot/Multiple-EZ-B-over-WiFi
@Merne, I tried to use the mesh network as shown in post # 4 (and also suggested on EZ Robot's web site). I found that if more then one EZB is attached to the first EZB being used as a router the EZB's wont stay properly assigned to the proper slot in the connection control in ARC. To explain further, the original assigned IP address remains in the ARC's communication slot but a different EZB will be used there instead. The result is ARC will play the scripts for a different EZB rather then the one assigned to that slot (and EZB number).
DJ said this is because the EZB's don't have the ability to remember the ID's of multiple EZB's connected to it as a router like a real router can. He suggested just using a real router.
My comment is, using one EZB as a router to create a mesh network by connecting other EZB's to the first is awesome idea. However doing this is useless if they can't stay assigned to the proper scripts and controls in ARC.
EZ Robot should remove this ability from their website or at least describe the limits of using this feature.
Thanks DJ.
@Dave
I have not tried mesh network yet using WiFi on the 1st EZB in AP mode, then connecting my other 2 EZB’s in client mode connected to the 1st ESB. Then using my my 2nd WiFi to my home router for internet yet.@Dave. Thank you for your feedback it my save me a lot of headaches not to mention broken parts. I’m going to wait for more info from DJ.
I’m wondering if you can assign an IP address for each EZB in client mode so they will use the same IP address every time reconnecting to the EZB in AP mode?
Cheers
edit: never mind, you can’t assign an up address using client mode.:(
@Merne, When in client mode I think your network router assigns the IP addresses. I'm no network guru so don't take my word. LOL.
As of now, in my robot, I have two V4 EZB's connected to my onboard Rock Pi X through USB and an IoTiny in client mode connected to my home network. In ARC the two V4's are connected through COM 3 & 4 and the IoTiny is connected over my home Wifi network. All are working great together like this. I probably should get a WIFI dongle for the Rock Pi x and switch the IoTiny over to AP mode and get me totally off my home network. I still need to add one more v4 EZB down in the leg section of B9. I may connect this last EZB through USB also but I'd need to run the cable through sections of the robot that twist and turn.
What fun!! I love this stuff.
I woke up with another idea this morning.
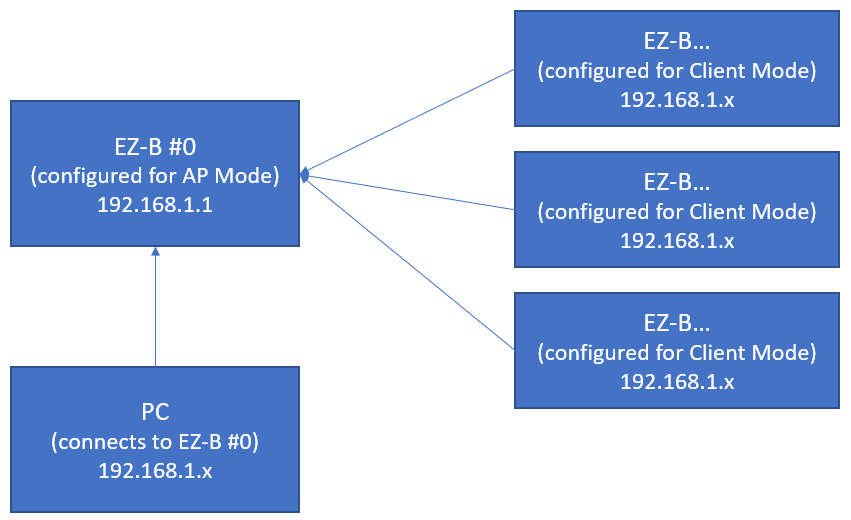
Since it seems like the V4 EZB can only keep track of one other EZB without losing track of them I think I'll try this with my 4 EZB's (three v4's and one IoTiny). This would keep the wiring limited between the Rock Pi X and the EZB's. Also it would keep wires from running through bobbing and weaving joints and everything off my home network router:
*I already have two V4's attached to the Rock Pi X through USB located at the top of my 6 foot B9 Robot. *I'll put the third v4 into AP mode and connect it to the Rock Pi X. I'll need a Wifi dongle so the Rock Pi X can still connect to the internet when needed. *I'll put the IoTiny into Client mode and connect it to the third EZB V4 that is in AP mode.
I'm looking forward to see how this configuration works.
@Dave
That is correct. However, on my route I can assign each IP address for each ezb so it uses the same ip for each ezb without having to discover them all over again.I did put one ezb in ap mode then connect the other EZBs to it using client mode other other EZBs. Even saved my ARC settings after a reboot the EZBs in client mode got the wrong ip’s for each ezb.
I’m going to replace them all and with Arduino’s. It’s a hassle but it should be more stable setup.
As you said, what fun.:)
You can use DHCP on most routers or a static IP thats assigned by MAC address.
I have a separate router for my robots with a different SSID than home mesh. This way when I take them out I can just set my SSID and password on my phone to same as router and robots all work.
I agree on hard wire as much as possible and only use one wifi connection to robot as you limit possible interference. I think robots should always be able to act autonomously when possible so if they do lose connection to outside they at least have enough smarts to shut down on their own.
arduinos are great cheap alternative to EZB just not as easy to wire up especially if you don’t have a shield. They don’t handle a lot of servos very well though so for my complex robots with large DoF I stick with EZBs and serial coms