
Bobsheaux
USA
Asked
I'm sorry for ANOTHER stupid question, but I'm having a REEEALLY hard time following the Tutorials and searching for help in the forums here. I've just attached my ultrasonic distance sensor to my EZ-B4, but I can't figure out how to do anything with it. At this point, I just want to have my robot navigate autonomously (which, to the best of my knowledge, should be a fairly simply process) before moving on to more complex tasks, but I've got no idea how to proceed from here. What do I need to do to figure this out?
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skills (view all robot skills)

Ultrasonic Distance
by Synthiam
Displays HC-SR04 ultrasonic distance readings in ARC; scriptable via GetPing(), pausable, sets a variable with multiplier, optional NMS output

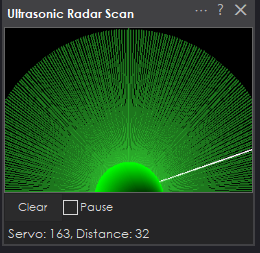
Ultrasonic Radar
by Synthiam
Ultrasonic on a servo sweeps 180°; radar shows distances and obstacles, integrates with movement panels for automatic avoidance, scriptable GetPing

Ultrasonic Collision Detection
by Synthiam
Stops robot movement (no steering) when an EZB-connected ultrasonic sensor detects an object within a set range; integrates with scripting and paused polling.

rechargble AA batteries are 1.2 volts. non rechargebles are 1.5 volts. so rechargebles are not so good for using robots . a servo is 7.4 volt .the batterie case has 6 x 1.2 volt=7.2 volts not enought.
what happens when you slow down the speed even more?
btw keep ranting and don be a chame for it.and you are not the only one. learn to be patients .you will live longer.:)
If you have questions about ezrobot products, they have a learn section with lots of info: https://synthiam.com/Tutorials/
Questions about their products and such can be asked on their website with their Contact Us page.
we’re not ezrobot. Ezrobot won’t see your messages or product feedback here.
as for using an ultrasonic distance sensor, there’s some info in the ARC manual in the docs section
Bobsheaux
witsh ARC are you using?
I've upgraded to the latest version of ARC, and the speed of robot has been reduced to half of what I had it at the last time.
Here are my current ultrasonic settings, and the only values here that I recognize are the EZB ports into which I've plugged the appropriate servos and ultrasonic sensor.
What's weird is that I didn't even need to hit the FORWARD command on the servo Movement Panel like I was doing before. As soon as I connected the robot, it was moving on its own. But it wasn't even MOVING on its own, it was... rocking to the left and right very faintly, and backing up slightly. Yes, I see that I have 'Reverse Before Turn' selected, I wanted to give it some room to clear whatever might be blocking its way. But now it's just looking back and forth slightly, not going anywhere, but backing away, and then it just STOPS before I tell it to stop. Hitting the Stop button myself doesn't work, and if the radar scan screen devoid of red dots is any indication, it wasn't detecting anything.
It seriously looked like it was AFRAID of doing anything, and it couldn't even see any reason TO be afraid of doing anything. :/can you take ARC from adventurebot to test your robot movements? ( arrow keys ) you can delete the camera window if you dont use a camera.
I can't connect my EZB to the Adventurebot, and the arrow key commands were already working fine before.
any ezbv4 can connect to any ez robot just saying.can you upload a chort video? what kind of wheels are you using? does your arrow keys work fine now?