Asked
— Edited
Cosmetic Change
i wanna have that legs of six desame is as the right side. what is the degree then?and need i to change anything els.
its pure cosmetic
 Command Duplicator
— Duplicate and synchronize commands from one master EZ-B to multiple slave EZ-Bs for simultaneous, mirrored robot actions.
Try it →
Command Duplicator
— Duplicate and synchronize commands from one master EZ-B to multiple slave EZ-Bs for simultaneous, mirrored robot actions.
Try it →

If I understand you correctly, you will have to invert the servos in the software with the "Invert" option, and then take the servos off and put them on the way you want them, which should involve rotating them 180.
If a servo is opposite and therefore position 10 on servo 1 is the same position as position 170 on servo 2 it's simple to calculate.
Servo_2_Position = Max_Position - Servo_1_Position OR Servo_1_Position = Max_Position - Servo_2_Position
For ARC, Max_Position is 180 (on the V4).
Some quick examples; Servo_1_Position = 15 therefore Servo_2_Position = 180 - Servo_1_Position = 180 -15 = 165.
Servo_1_Position = 35 therefore Servo_2_Position = 180 - Servo_1_Position = 180 -35 = 145.
Servo_2_Position = 15 therefore Servo_1_Position = 180 - Servo_2_Position = 180 -15 = 165.
To confirm all positions are correct, Servo_1_Position + Servo_2_Position = 180.
This presumes the servos rotate 180 degrees. Should the servos rotate more or less then the above would require altering and, in some cases, it would not be possible to mirror servos.
However, with all that said, when using the Auto Position control I find it easier to align by eye. Servos are not 100% accurate and there may be instances where position 35 doesn't mirror position 145. It's also quicker than trying to calculate it.
hi bolt
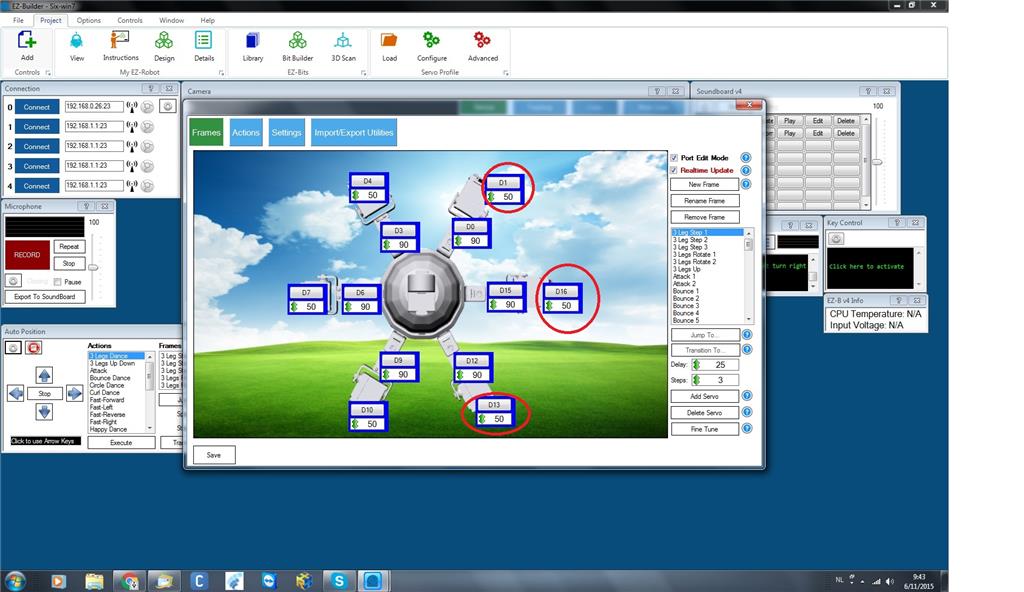
al 6 servo's stand on 50 degree in the pic.withs i dont understand eachter. servo D1= servoD16= servoD13= right side
As Techno said, take the right side servos off, then turn the servos around 180 degrees and reattach. Then you want to change the positions to the following values...
New right side servo positions. servo D1= 130 servo D16= 130 servo D13= 130.
thank you al for replaying.
steve g that i do understand.
It's basicly what Rich said. With a servo attached to a robot in reverse, just reverse the position numbers. So from centre 90 degrees...
80 is 100 70 is 110 60 is 120 50 is 130
And so on...
20 is 160 10 is 170 1 is 179 (or 180).
i made a note.
Hey @Nomad... I found a new avatar for you...
or this one....