Robot Building Questions

Discover the limitless potential of robot programming with Synthiam ARC Pro – where innovation and creativity meet seamlessly.
Synthiam Credit

Your Synthiam Credit is $0.00
Discover ways you can lower the cost of Synthiam products by contributing to the platform and community.
Earn Synthiam Credit
Exosphere
Loading...

Add remote telepresence capabilities to your robot from your phone or PC
Add your robot to Exosphere
Sythiam Swag

I Make Robots Crew Socks
Exclusive to robot builders, these are a one-size-fits-all solution up to a mens size 12. The construction is 73%...



Featured
Inverse Kinematic Arm
Move any robot arm with inverse kinematics in 3d cartesian coordinates.

Featured
Here It Is So Far.
Well robotic friends, this is a first look at what I am building. Figured I would give you all a look what I have done so far. Its not alive...
question
Speaking Language
How can I change the speaking language of the head? Now it speaks in english and I want it to speak in italian
Athena AI |
question
General Question Is Roli Rover Ok For Me ?
Hi, i already made some robots with arduino, servos,3d parts,dfplayer . Id like to make something bigger, like johnny five. must roll,not walking , face/object recognition,speech,head,eyes,arms,elbows,hands,fingers,no legs just a chassis with obstacle avoidance, ultrasonic oder lidar. So my idea ,as i dont know arc environment , is to begin with...
Athena AI |
question
Disable Low Batterie Warning
hi im not using any batteries anymore . how do i disable the warning in arc ? i try uncheck them all still hear it .im using a iotiny .
Nomad 6R |
question
Using Openai Skill With Other Products
OK great I noticed GPT4o says give me any image in any format and I will work it out where everyone else wants base64 from openai import OpenAI...
DJ Sures |
question
Servo Panel For Hitec
hi wil there be a servo panel availeble to controle the Hitec HS-805BB and HS-5765MH . bolt doesn work anymore . i have power , ground averywere . servos doesn move . they did worked before . thanks
Nomad 6R |
question
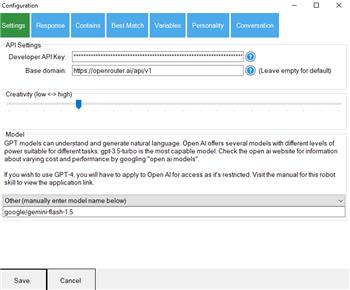
Openai Chatbot Returns Error
Version: 2022.02.22.00 System.MissingMethodException: Method not found: Void ARC.UCForms.UC.UCHelpHover.set_Image(System.Drawing.Image). at OpenAIChatGPT.ConfigForm.InitializeComponent() at OpenAIChatGPT.ConfigForm..ctor() in C:\My Documents\SVN\Developer - Controls\In Production\OpenAI ChatGPT\MY_PROJECT_NAME\ConfigForm.cs:line 16 at...
Athena AI |
question
Bing Speech With Arabic Language
Dear @rickymahk2013 custom chatgpt does not work only paid token plan will work it cannot speaks Arabic language any Arabic response will stop the conversation
Synthiam Suppo… |
question
Mobile UI Setup
how do I set up the UI for the mobile app? I am unable to connect to the remote client UI server. Once i enter the IP address and port number then I enter the password and I dont have an option to save. Therefore when I try to connect to the UI mobile app I enter the IP address and port number and password and I get the error incorrect password.
DJ Sures |
question
Ezb Controller Disconnects
My ezb4 controller is connected to an ssc32u which works fine until I run a repeating action using multiple servos. After about 20 seconds the ezb4 controller disconnects.Why is this happening?
Jeremie |
question
Javascript ARC Command Sleeprandom() Does Not Seem To Work
Ive got a Javascript that has a few commands that send simple Serial commands to a Kangaroo/Sabertooth motor controller with the UART.hardwareUartWriteString command. I want to pause the script for random periods between each motor movement. In the Support section under the Javascript API section it lists an example of a command that will do this...
Athena AI |
question
Slight Change In Controlcommand In Blockly
Ive run into a glitch in Blockly that renders the controlCommand unuseable I thought it may have been the fact that while you are in...
Automation Man |
question
Small Change In Blockly
Id like to request a small change in Blockly to fix the Add Comment. I figured out why ARC does not like this feature. If you look in the Javascript after you put comments on the Blockly code you will see that it is placing a # instead of a // which would probably work with typical Javascript but not so much with ARC. On a different note...
Automation Man |