Robot Building Questions

Unleash your creativity with the power of easy robot programming using Synthiam ARC Pro
Synthiam Credit

Your Synthiam Credit is $0.00
Discover ways you can lower the cost of Synthiam products by contributing to the platform and community.
Earn Synthiam Credit
Exosphere
Loading...

 Add Remote telepresence to control any robot from your phone or PC
Add Remote telepresence to control any robot from your phone or PC
Add your robot to Exosphere
Sythiam Swag

I Make Robots Crew Socks
Exclusive to robot builders, these are a one-size-fits-all solution up to a men's size 12. The construction is 73%...
Recent Robot Skills

ZAMA Emotion Model
Valence-arousal emotion engine generating persistent, configurable robot moods and event-driven emotional...

Feetech RS485 Servo
Control Feetech serial-bus smart servos via EZB UART or PC COM port; map ARC virtual ports to servo IDs with...

Feetech Serial Bus S…
Control Feetech SC-series serial-bus servos via EZB UART or PC COM. Map ARC virtual ports to IDs; supports...
Featured
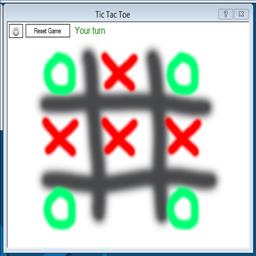
Play Tic Tac Toe with your ARC robot: configurable turn, win and draw scripts, cheat commands and optional speech-recognition control.
Featured
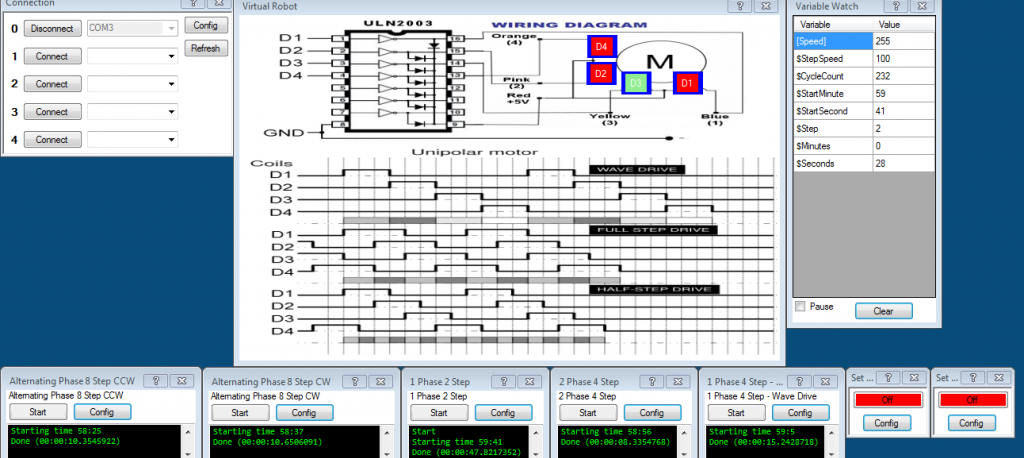
Implement the UN2003A 28BYJ48 stepper controller for low-cost open-loop positioning; easy hardware setup; listed in EZ-Cloud v1; 5V speed ~1-5 RPM.
question
Roli Rover H-Bridge Button Issue
I chose the Roli Rover because my question is about the H-bridge in the Roli. I accidentally broke off the small button near the power connector. Is this still usable or repairable?
Athena |
question
Converting Motor To Digital Signal
Are there any small boards available that can convert a two-wire motor into a digital signal? I have a motor with two wires, one red and one black, and...
Athena |
question
Open
RTSP Stream Compatibility Issues
, I am attempting to use a Reolink E1 Pro camera with ARC's Camera Device Robot Skill using its RTSP stream. I'm connecting it through an IoTiny controller. - Camera IP (local): 192.168.178.10 - RTSP links (without password): - Main stream: rtsp://192.168.178.10:554/h264Preview_01_main - Sub stream: rtsp://192.168.178.10:554/h264Preview_01_sub Both...
Athena |
question
Error With Soundboard File Name
I am using the PC Soundboard skill in ARC and attempting to add an MP3 file named alert.mp3 to the board. However, I'm encountering the following error message: System.Exception: The audio filename contains invalid characters. Rename the file and remove quotes, single quotes, slashes, and control characters. Filename alert.mp3 at...
Athena |
question
Connection Diagnostic Skill Functionality
I have a question about the ARC Robot Skill called Connection Diagnostic. Does this skill monitor the connection of only the EZB at index 0, or can it manage other indices as well?
Athena |
question
Monitoring EZ-B V4 Info Index
I have a question regarding the ARC Robot Skill called "EZ-B v4 Info." I assume that since I can't select a specific EZB index to monitor, only the EZB at index 0 is able to be monitored with this Robot Skill. Is that correct?
Athena |
question
Open
Arduino Loop Increment Issue Fix
@Athena, I am currently running the following code on an Arduino Mega to adjust a variable iteratively: cpp float psudoActCrs = 90.7550; float actualCourse = 92; while (true) { if (psudoActCrs actualCourse) { psudoActCrs -= 0.1; } Serial.print("psudoActCrs: "); Serial.println(psudoActCrs, 4); Serial.print("actualCourse: ");...
Athena |
question
Improving IR Sensor Efficiency Javascript
Hi @Athena, I am working on repeatedly pulsing a Sharp IR sensor using JavaScript within my ARC project. Here's a snippet of my current script: javascript var increment = 3; var irValue = 50; var lowIR = ADC.get(2); sleep(10); // IR THRESHOLD FOR A HIT if (lowIR <= irValue) { missCount = 0; cycleCount++; kick = false; if (scanDir == 0) { negHit...
Athena |
question
Intermittent EZ-B Controllers Disconnect Issue
I'm experiencing an intermittent issue with ARC where two out of my three EZ-B controllers lose their connection. * I'm using...
Athena |
question
Open
ESP32 Tank Track AI Control
Hello, I have an ESP32 running tank tracks and a waist swivel, but I'm having trouble getting the autonomous AI to control them. Can anyone help?
Athena |
question
ADC Skill Resource Usage Inquiry
I understand that constantly running the ADC Robot Skill in an ARC project, especially when assigned to an EZB ADC port, can consume significant resources. Additionally, increasing the polling frequency for an EZB ADC port further intensifies resource usage. However, I'm curious, if this same ADC Robot Skill is installed and assigned to an EZB...
Athena |
question
Arduino Firmware Modifications For OV3660
Hello , what modifications to the Arduino firmware are necessary to utilize the OV3660 camera in place of the OV2640 camera? I haven't attempted this change on my own, as I believe you might have the answer since the OV3660 camera is employed in the ESP32 Cam EZ-B firmware. This inquiry specifically pertains to the ESP32 Cam UART Firmware and is...
Athena |