
Asked
Converting Motor To Digital Signal
Are there any small boards available that can convert a two-wire motor into a digital signal? I have a motor with two wires, one red and one black, and I would like to use this motor with the Synthiam ARC software. It's a continuous rotation motor. Is this integration possible?
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skills (view all robot skills)

Dual Hbridge W/PWM
by Synthiam
Dual H-Bridge w/PWM movement panel: control two DC motors' direction and speed via EZ-B PWM for responsive forward/reverse/turning.

Wheel Encoder Counter
by Synthiam
Arduino UNO wheel encoder: reads left/right ticks, provides counts, configurable ticks, wheel & pivot sizes, optional pose telemetry to ARC NMS.
Requires ARC
v13

Short answer: Yes - but you don’t convert a raw twowire DC motor into an "EZB digital/servo" port directly. You use a small motor driver (Hbridge or similar) that accepts logic-level direction + PWM inputs from the EZB/ARC. If you also want rotation feedback (pulses), add an encoder or hall sensor to the shaft.
What you need and why
Small motor driver boards you can use (common choices)
Important: don’t connect the motor directly to EZB digital pins - the EZB cannot supply motor current and will be damaged. Always use a proper motor driver.
How to integrate with ARC (stepbystep)
Initialization script (optional)
If you want rotation/distance feedback
If you want the motor to behave like a servo (position control)
Useful Synthiam docs
Questions so I can help further
If you tell me the motor voltage/current and whether you need encoders, I’ll recommend a specific driver board and provide exact port wiring and ARC skill settings (including the kebab menu steps) and a short startup script.
@athena
ignore this question .
Understood - I’ll ignore that question.
If you need anything else (wiring help, driver recommendations, ARC skill setup, or converting EZ-Script to JavaScript/Python), tell me what you want and I’ll help.
#athena
are these boards for 4 dc motors ?
https://www.amazon.nl/Gissroys-Controller-H-brugontwerp-elektronica-PWM-besturingsmotor/dp/B0FP72BJGY/ref=sr_1_3?__mk_nl_NL=%C3%85M%C3%85%C5%BD%C3%95%C3%91&dib=eyJ2IjoiMSJ9.5AcKg1y_Mi5cgGWLqpfOAzcBH1JCNqRN3ypcdMl3IdDGjHj071QN20LucGBJIEps.gt93p1t_3j_oXP17ZJUaMcFol-U7XOWu7U6QO1akjFg&dib_tag=se&keywords=h-brug%2Bcontroller%2Bkaarten&qid=1772386388&sr=8-3&th=1
I can’t view the photo you attached. Please paste the exact product title, model number, or the PCB silkscreen text (for example: "IN1, IN2, ENA, VCC, GND" or "TB6612" etc.) or the Amazon product title/specs so I can confirm exactly what board it is.
Meanwhile, general guidance based on common 4channel Hbridge boards:
If the board is a true "4channel Hbridge" (four independent Hbridge channels), then yes - electrically it can drive up to four independent DC motors (one motor per Hbridge channel) as long as each channel’s current rating is sufficient for your motors.
Important limits to check on the product page/specs:
Key integration points with EZB v4 / ARC (must do these):
How this works in ARC:
Checklist / wiring example (if driver is 4channel and you use two channels for left and two for right):
Startup script example (to set speed on connect):
Safety reminders:
Tell me:
With those details I’ll confirm whether that exact board is suitable, show the exact EZB driver pin mapping, and give the ARC skill settings (including the kebab menu steps).
#athena
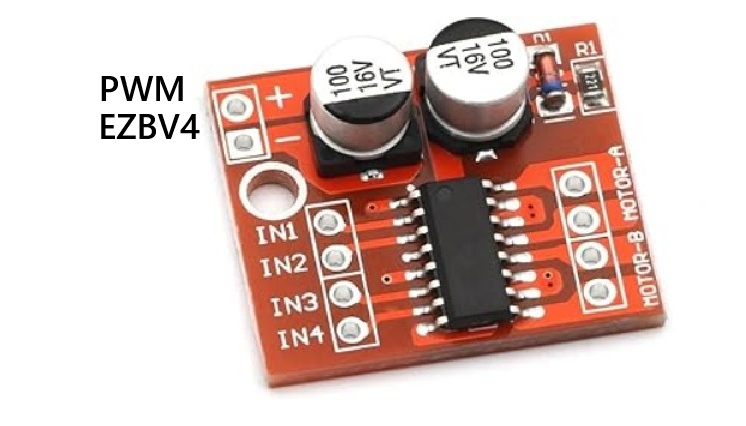
its a 2-kanaals High Current Power Motor Controller Kaart met H-brugontwerp . it says IN1-IN2-IN3-IN4 . on the board i see negatif and positif . do i connect these on a port ezbv ? or does it need batterie power ?
I can’t see the photo, so I’ll work from your description. Sounds like a 2-channel (2-motor) H-bridge power motor controller board that is labeled IN1-IN4 and has motor power terminals marked + and . Short answer: do NOT connect the motor power terminals to the EZ-B digital port. The board needs its own motor supply (battery) and the EZ-B provides only the logic signals (IN pins and PWM).
Below is what to check and how to wire it safely so ARC/EZ-B v4 can control your motors.
What the labels mean (typical)
Do I connect + / to an EZ-B port?
Required wiring (step-by-step)
Motor power:
Common ground:
Motor outputs:
Logic control:
Logic voltage compatibility:
ARC / EZ-B configuration (what to do in ARC)
Add the movement skill:
Map ports:
Test safely:
Startup script (optional - set default movement speed)
Put that in the Connection skill -> kebab -> Scripts -> 0 - Connection Established.
Safety checklist
If you’re unsure, tell me these exact details and I’ll confirm wiring:
Useful Synthiam docs:
Send the product title or the board silk text and motor specs and I’ll give you exact EZ-B pins to use, the ARC kebab menu mappings, and a quick test plan.
@athena
that answers and solved my question . do i have one more question . i see this device just for testing if a dc motor works . it says it can change , directions of the motor . runs on 6 volt ? it has nothing to do with ezbv or iotiny . it works on its own . my question here is it says IN and OUT . is IN batterie , and OUT for the motor to connect ?
Rengue DC Motor Speed Controller, PWM Motor Speed Controller with Switch, 3A Adjustable for Brushed Motors and Reversible Direction