All Community Content



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
I Make Robots Crew Socks

Hugging Face
Connects a robot camera to Hugging Face AI models for vision chat, object tracking, classification,...

Autonomous AI
Autonomous AI robot agent with vision, speech, movement, animations, memory, and self-directed task...

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...
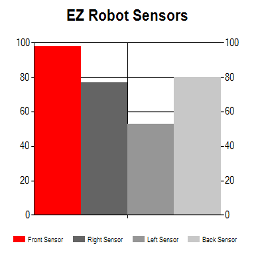
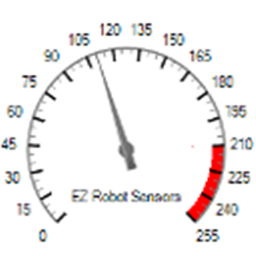
4-series bar chart for real-time sensor comparison in ARC; set titles, values, RGB bar colors and conditional coloring via EZ-Script.

Omega robot build 75% complete using Rad Bot 1.0 tracks and plexiglass; pending neck/head, wiring, motorized tracks, RGB 8x8 eyes and EZ-B v4.
Is It Possible To Ramp Up And Down The Brightness Of Leds?
No lucking finding a post on this. I am working on a BB-8 driod with the EZ-Robot and am looking to get LEDs to quickly ramp to full brightness and fade out the same way (as opposed to just turn on or off.) Any ideas on the best way to achieve this? Thanks, Bob
Chuckbot
Hi guys, Just a quick look at my first attempt, I call him Chuckbot. He still needs arms but he runs great. I have him geared up with voice recognition, joystick and collision avoidance. His shell is made...
Ezb Camera
Why would EZB sell a camera that is not focused? Then have a learn section that explains how to focus? Because of this I have broken my new camera that cost 59.00 and will not be in warranty. @DJ, can...Script To Refresh Joystick
is there a command i can put in script to refresh the joystick ez panel as opposed to clicking the refresh button in the ez joystick window?
Sabertooth 2X25 And Ez-B V4 Simply Serial Connection
I have received my very first Sabertooth 2x25 motor controller today, and looking to hook it up over the weekend....Jenco's Hi Yes I Believe The Rugged La
Rugged large-wheel semi-electric/diesel robotic platform to speed farming beyond tractors; pursuing patents with investor support.Windows Release 2016.01.15.00
Soundboard STOP halts movement panel actions for dance routines; joystick supports controlcommand() reset; camera accepts port param for ezb v4.x/2.Ultrasound, Ping And Object Avoidancec On The Ezb-V3
Richard, would you know what script the Object Avoidance was for the v3. I have One PING unit with One sharp IR. . that's it. I just want to find that little algorythm. I used to know this site like the palm of my hand. But, I have forgotten a lot in the last many years. I am down to one robot, Sally. I finally scraped up enough to get some eyes. I...Obvious - Dumb Question - 7.4V Lipo Pack - But Most Servos Including Ez-Servos R
I am going to ask a question that has been gnawing at the back of my head. I have searched around and I see yes's and no's. If a Servo is one of the many servos that gives you a torque at 4.8v and 6.0v And the EZBV4 pins are unregulated. Does the LiPo powering the EZBV4 mean that I need to only look for 7.4v servos?