All Community Content



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
I Make Robots Crew Socks

Autonomous AI
Autonomous AI robot agent with vision, speech, movement, animations, memory, and self-directed task...

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

Control DJI Tello from ARC with live camera feed for computer vision tracking; fly via scripts, speech, joysticks, Python, or Exosphere.

Homebuilt robot Arnie with pan/tilt head that looks around freely; awaiting H-bridge for mobility, plus paint and arms.

Ezb4 Used With Heavy Machinery?
Its sad that my omega never was completed nor was rollex but after considering starting all over again more on a heavy duty side, i just thought to ask the...E.M.F Radiation From Router Wifi
is it possible that when a robot is powered off,it stil sends a signal? i tested the EnGenius and my router,nothing.Stopping Audio In A Script
Hi, just trying to run a basic script to demo Six reacting to different Glyphs of album covers, speaking a line, doing a movement for a few seconds, then playing some of a track from the relevant artist. However despite using a 'Stop Audio' command after the final movement has ended the music won't stop. Am i missing something here? thanks in...Openjarvis-Kalliope Or Similar With Ezb
I've been looking around in the Forums and have seen some speech being used with EZB, but does anyone have a working example being used with say OpenJarvis, or Kalliope or similar? Kalliope-https://kalliope-project.github.io/ OpenJarvis- https://openjarvis.com/ I'm asking because some of the talking robots that I've seen coming up (InMoov for...
Questions For Any Hexapod Builders
Hey there guys I got a few questions for payload on anyone who is building or has built a hexapod. I've designed this guy up for my son this week. Its a...
I Have You Now
darth jader s waponized.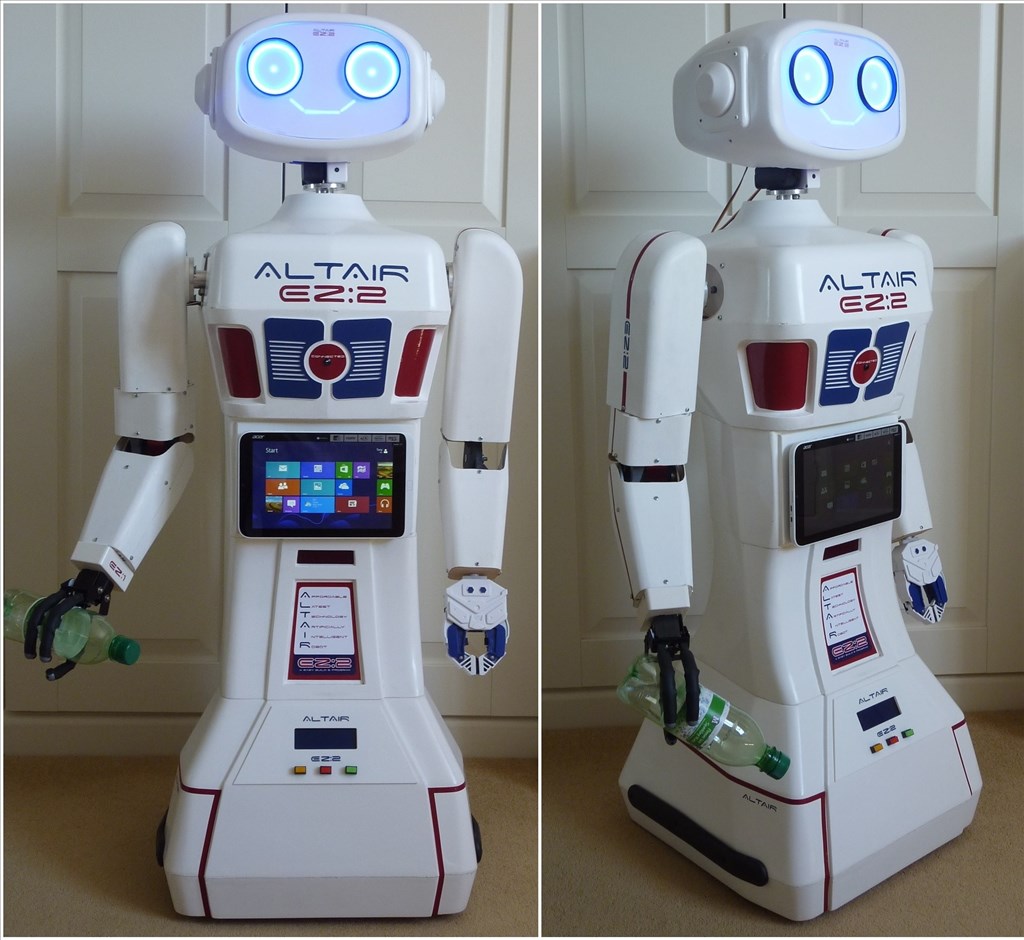
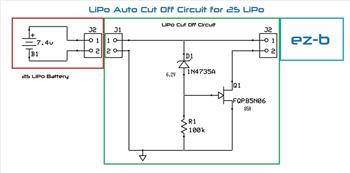
Toymaker's Introducing The Altair Ez:2 Robot
EZ:2 robot with EZ-Robot V4, face & object recognition, advanced AI, modular low-cost design, integrates with Synthiam ARC for...Jd Will Not Turn On
Today one of my JDs in my class would not turn back on. I unscrewed JDs back to double check all connections in his body and everything is intact. JD never indicated that it was on low battery after all JD was charged overnight. I've adjusted the female pins as shown in the video even though I didn't think that was the issue. This JD worked early...
Dynamixel's Crazy Hold
Anyone who is serious about professional servos should check out Dynamixels. I say professional because they are way overpriced. But, They now sell a $49 version that fits the...Anyone Looking For New Ideas For Diy Robots?
I found this article with some interesting concepts for home robots based on the Amazon warehouse Kiva robots spectrum.ieee.org/automaton/robotics/home-robots/inside-ticktocks-consumer-robot-product-explorationsWill These Be Available At Robotshop.Ca?
Does anyone know if these servos will be available at robotshop.ca? https://www.ez-robot.com/Shop/AccessoriesDetails.aspx?prevCat=9&productNumber=13 www.ez-robot.com/Shop/AccessoriesDetails.aspx?prevCat=9&productNumber=13