I found a design for a robotic gripper on Instructables, so I thought I would make one for my InMoov. The basic design was done by Techiebot here's the link to it; http://www.instructables.com/id/Universal-Gripper-Syringe-Powered/
I had to design and print a few parts to adapt everything to fit into the arm of my robot. It will pick up small objects and with a little more suction the gripper could pickup bigger objects. The EZ-Robot OS sure makes it easy to animated things like this but I don't need to tell you all that.
The first video shows it working and the second one describes the build.
By bhouston
— Last update
Other robots from Synthiam community

Mcjeff0125's Ez Rover Mark I
Id like to introduce you to my Brookstone Rover/EZ-B Robot. <a...
Nomad's Remix Inmoove Head
hi all <div class="embed-responsive embed-responsive-16by9"><iframe...
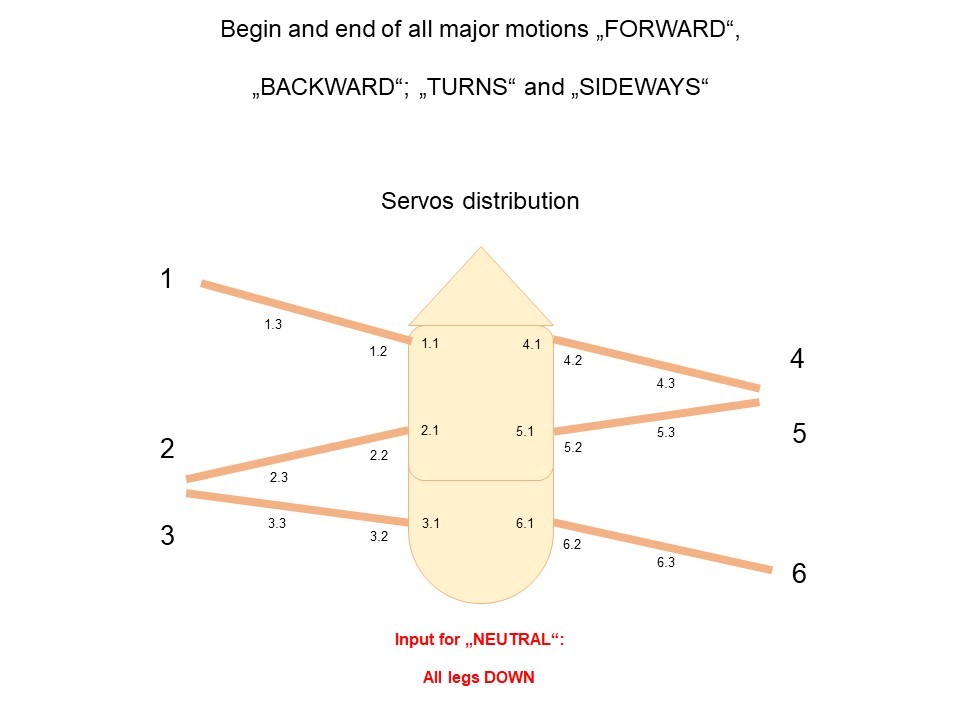
Klaatu's 1 M Hexapod (Autonomous Insect)
Hi guys, this is the first introducing part of a series, describing an autonomously operating hexapod with about 1 m...

That's really cool. I have been looking at these balloon grippers for a while, but I never would have thought you could use a servo to create suction. Very clever.
Alan
Nice work Bob.... Really nice!... Did you just print a new forearm and wrist and swat out your inmoov's original arm?
Never mind just re-read your post... Actually that's not a bad idea... swappable arms... :)
That is a great piece of engineering effort ! Really works well, especially with smaller objects.
Nice work Bob! I've also wanted to try building one of those types of grippers but just never had the time. Sweet implementation!
Great idea Bob, very inspiring. Your Inmoov looks and moves so naturally.
Thanks for your comments. I printed a new forearm so I can swap it out for the original one. I find that the HS- 755 servo has lots of power to pull the syringe. This was an interesting experiment, I think I'm going to try a small pump for the next version, to create more vacuum, then the gripper can be larger. The problem is finding a membrane that is the right size.
COOL!
I agree it looks a little odd! It was a proof of concept and a challenge to see if I could fit the mechanism in the forearm of the robot.