Here's the latest in my ARMadeus series of large scale robots. The robot is featured in a 10 page, 30 photo article in the November 2017 issue of servo Magazine. I'm including images here that were not published in the article. I'm obligated not to duplicate text or photos from the magazine article. And, I really don't want to start from scratch and write another 3000 word version. Rather than include a lot of technical details on the project in this initial post, I direct you to the article. I'll be more than happy to answer any specific questions posted by users on this forum.
The 140 lb robot features a universal mobile base with interchangeable personality modules. The first personality module is a pair of heavily modified NERF foam disc launchers mounted on a heavy duty tilting gun mount. Of course, the EZ-B v4 was prominently mentioned as the robot controller of choice. Why use anything else?
I know the photo descriptions are brief. Feel free to ask about any technical details. Thanks.
 Front cover of servo magazine.
Front cover of servo magazine.
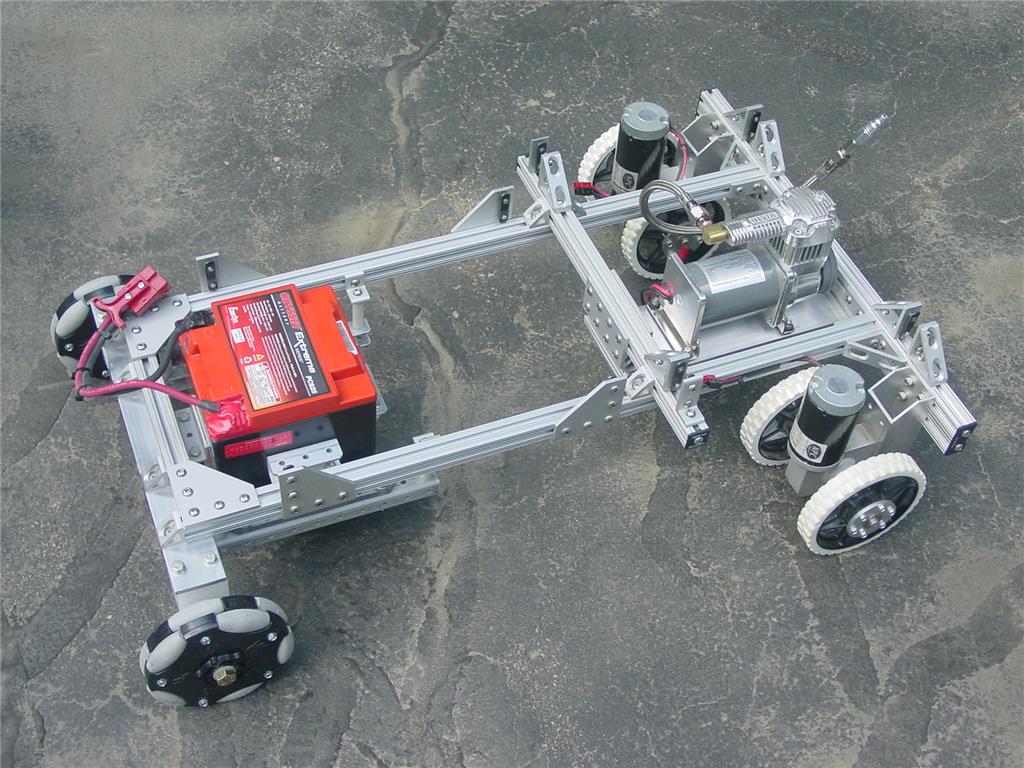 This is the 36" x 26" 80/20 aluminum chassis with the battery and compressor.
This is the 36" x 26" 80/20 aluminum chassis with the battery and compressor.
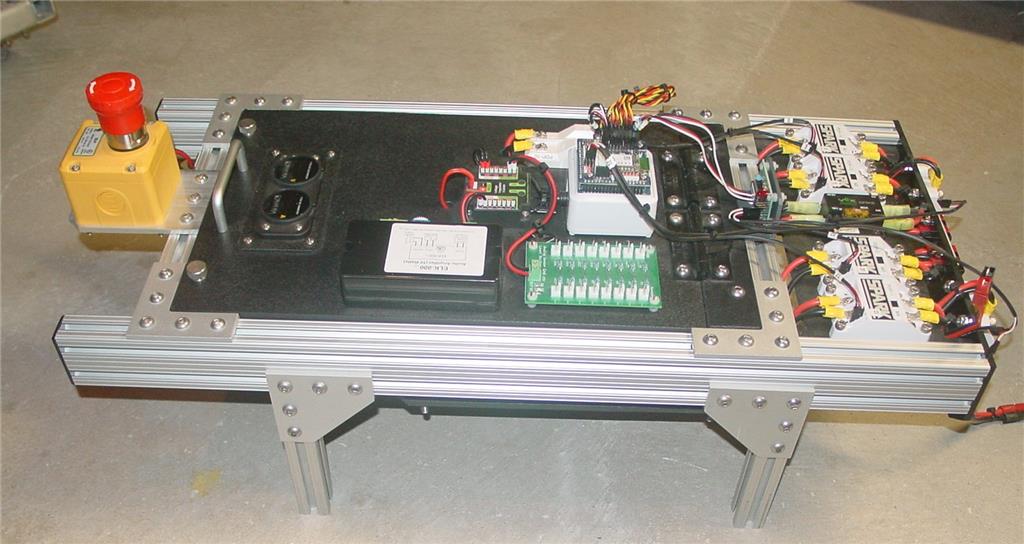 This is the electronics module that mounts on top of the chassis.
This is the electronics module that mounts on top of the chassis.
 Close up of the battery connection and main breaker/power switch.
Close up of the battery connection and main breaker/power switch.
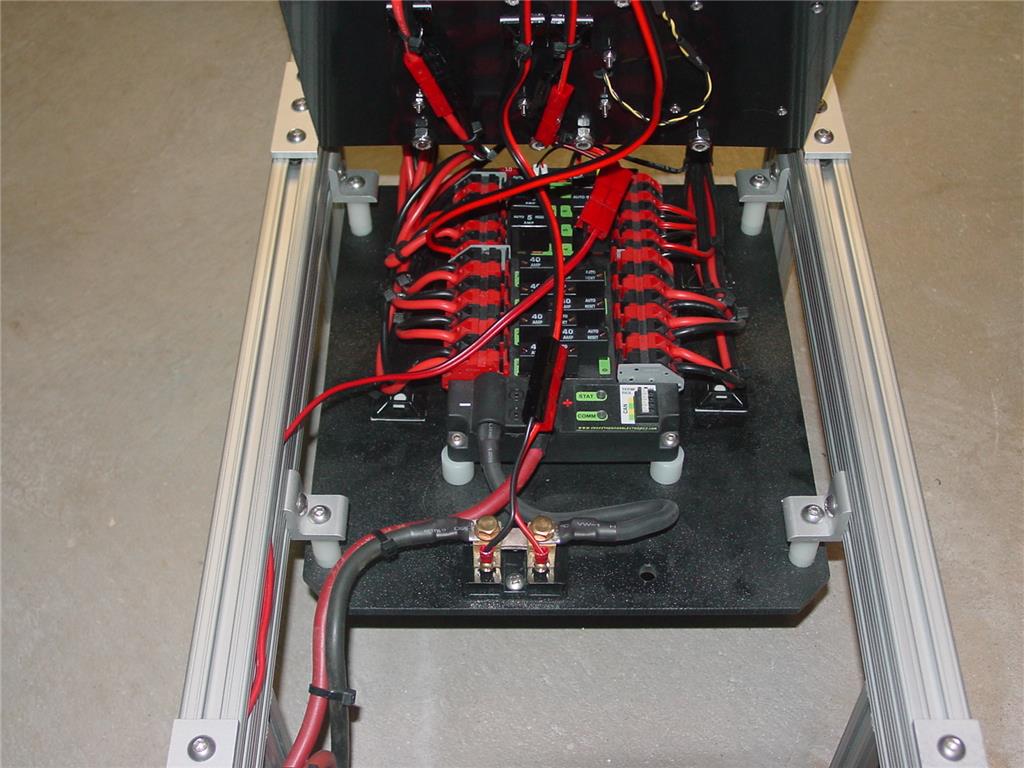 The top panel of the electronics module is hinged and opens up for access to the power distribution branch circuits.
The top panel of the electronics module is hinged and opens up for access to the power distribution branch circuits.
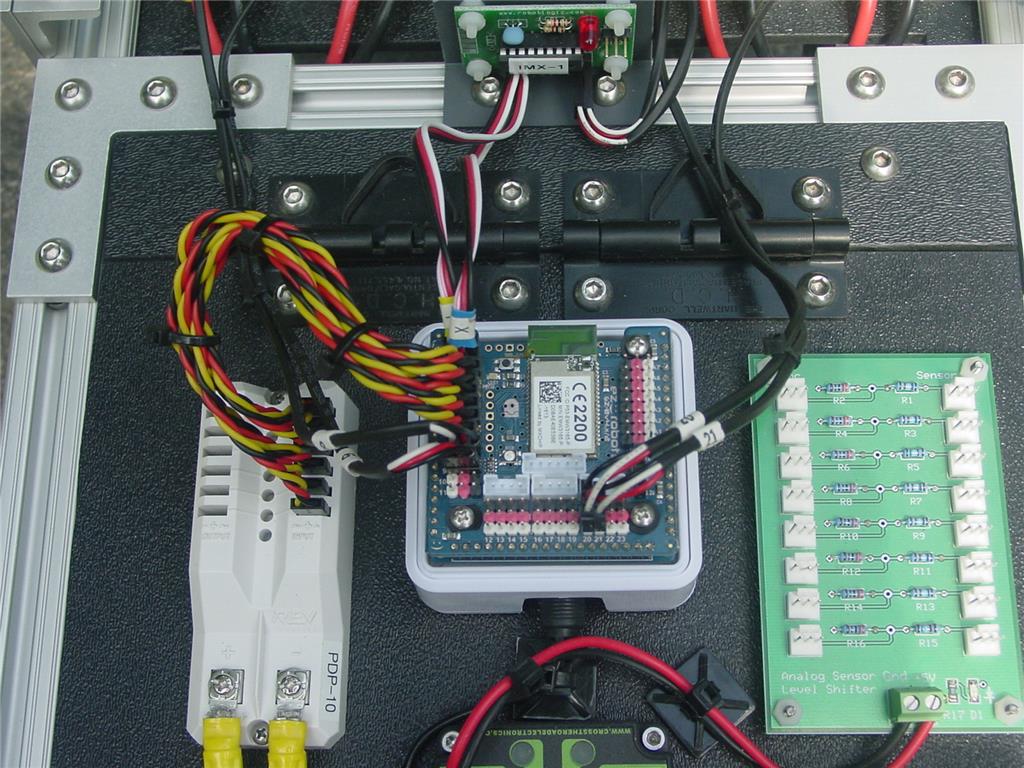 EZ-B controller with 6 channel servo Power Unit and custom analog sensor level shifter pcb.
EZ-B controller with 6 channel servo Power Unit and custom analog sensor level shifter pcb.
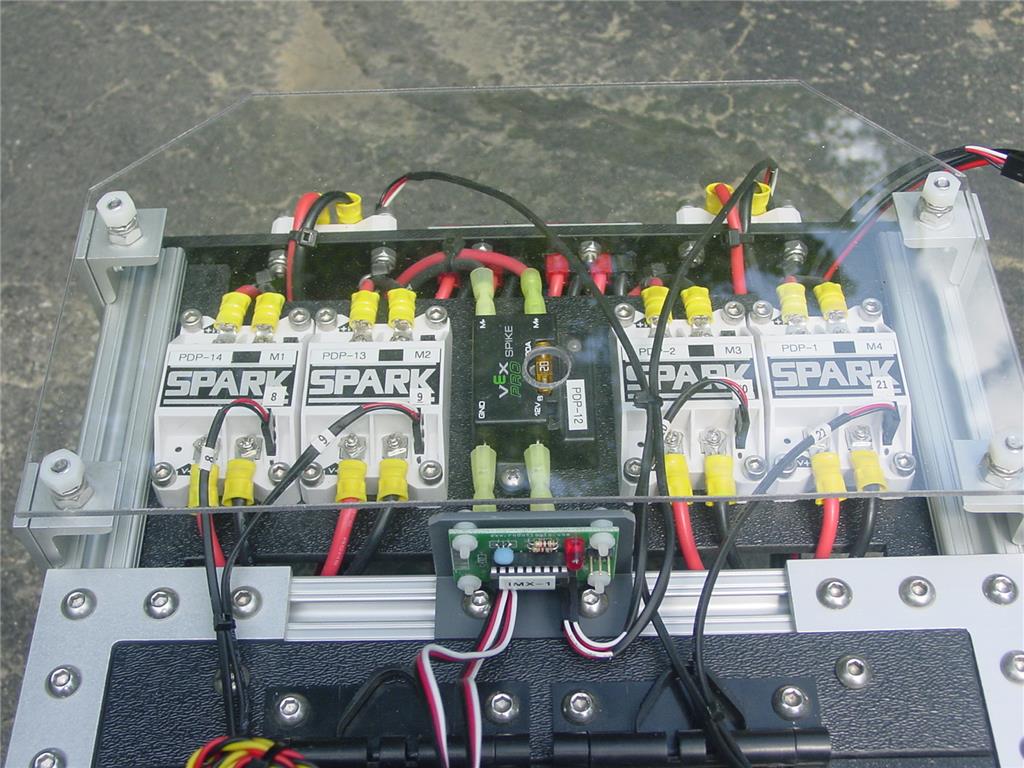 Motor controller bank for driving motors in the personality module.
Motor controller bank for driving motors in the personality module.
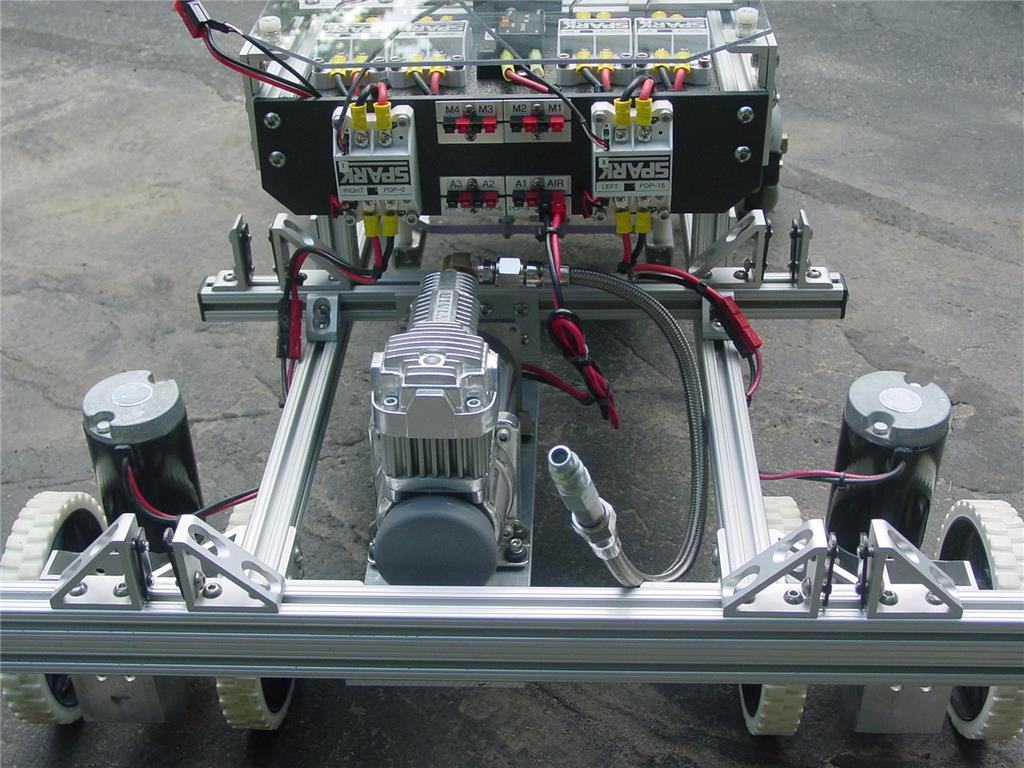 Motor controllers for the drive train and motor connectors for personality module.
Motor controllers for the drive train and motor connectors for personality module.
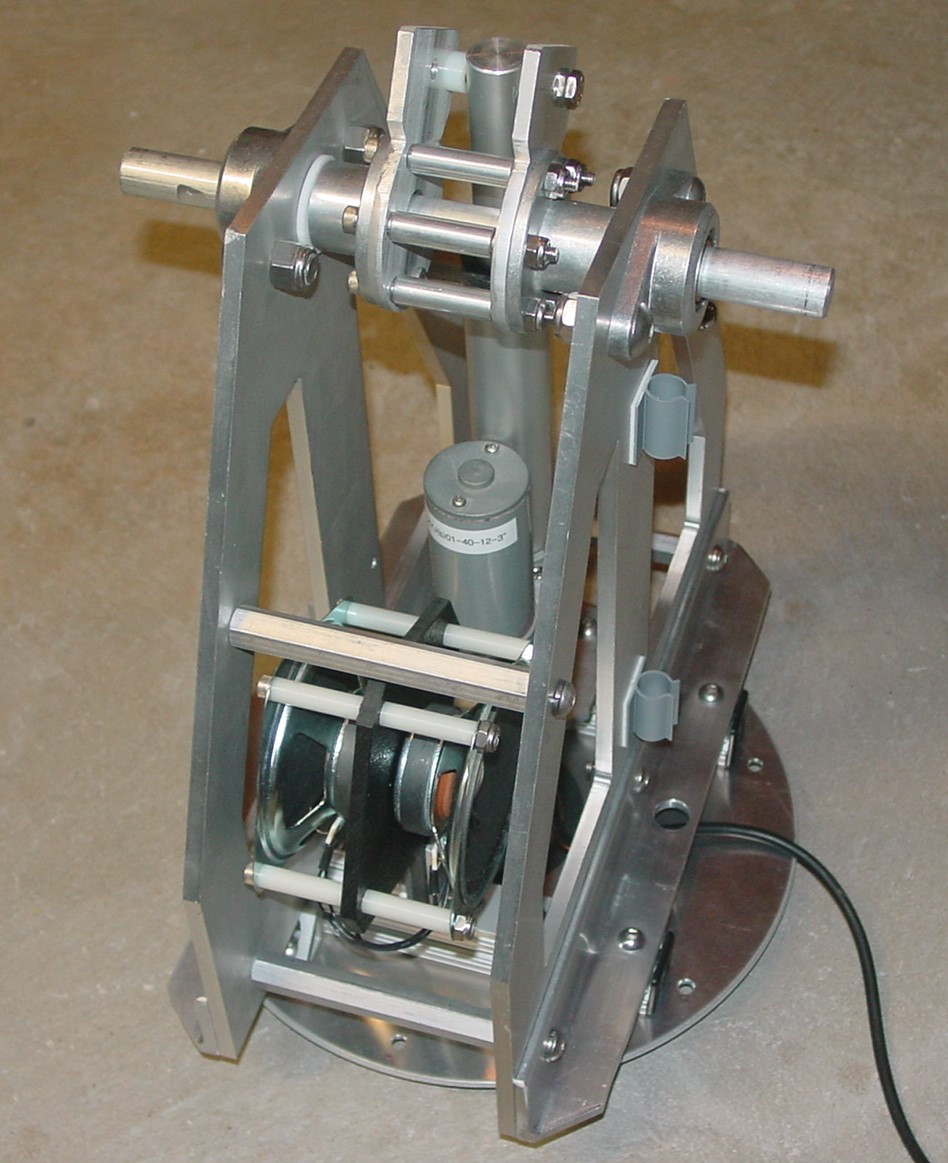
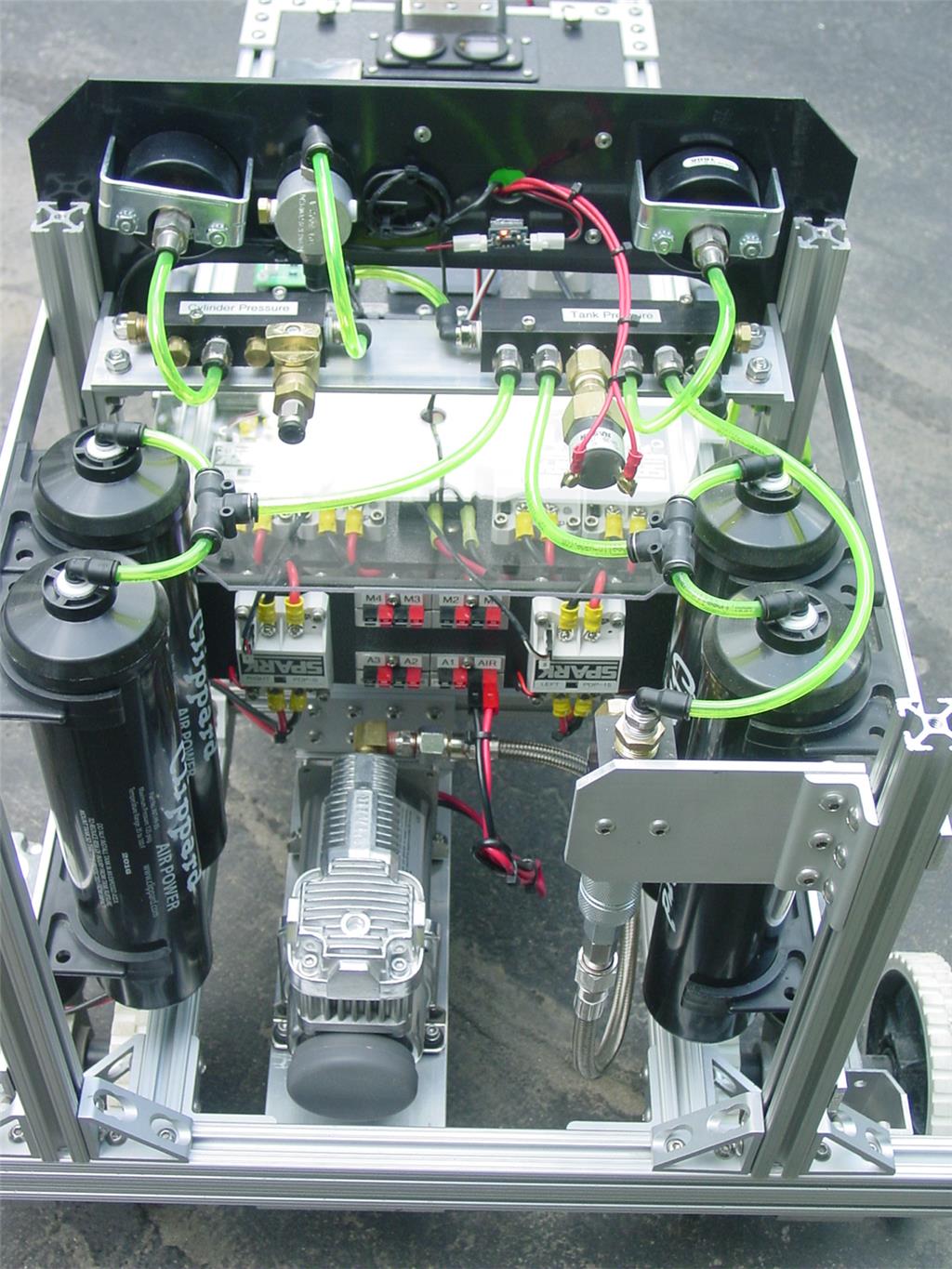 Pneumatic system installed in the turret module tower.
Pneumatic system installed in the turret module tower.
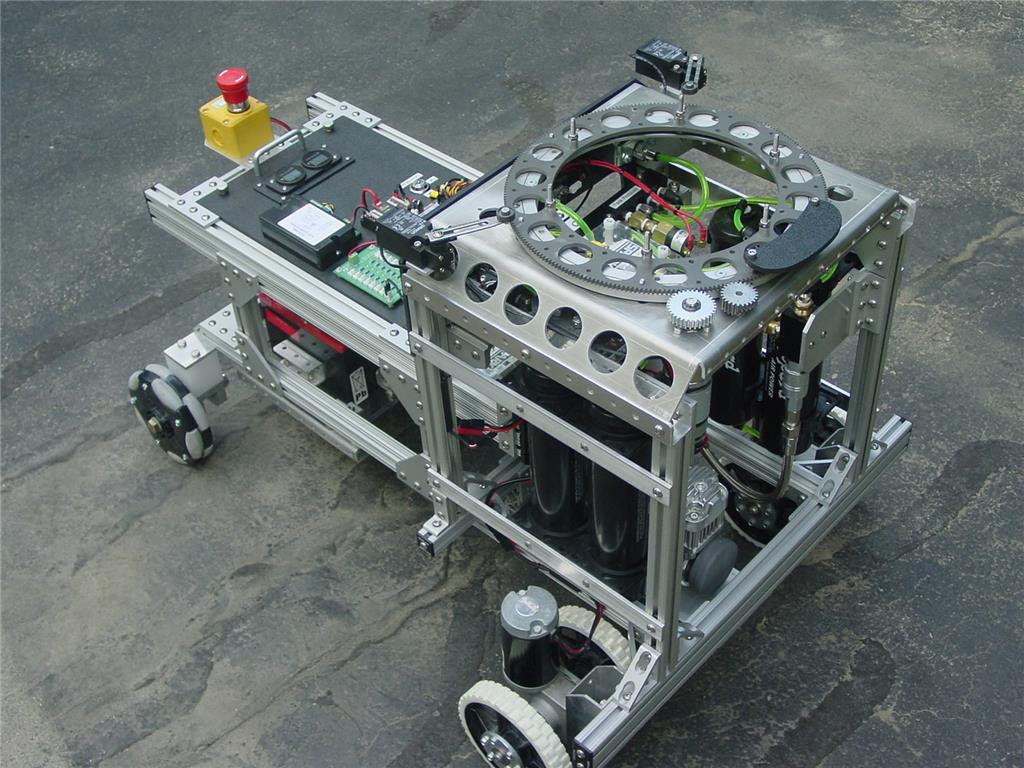 Completed robot base with the turret assembly installed. The main turret gear rotates 225 degrees.
Completed robot base with the turret assembly installed. The main turret gear rotates 225 degrees.
 10" diameter aluminum plate forms the base of the personality module.
10" diameter aluminum plate forms the base of the personality module.
 Gun mount assembly with linear actuator and speaker pair installed on base plate.
Gun mount assembly with linear actuator and speaker pair installed on base plate.
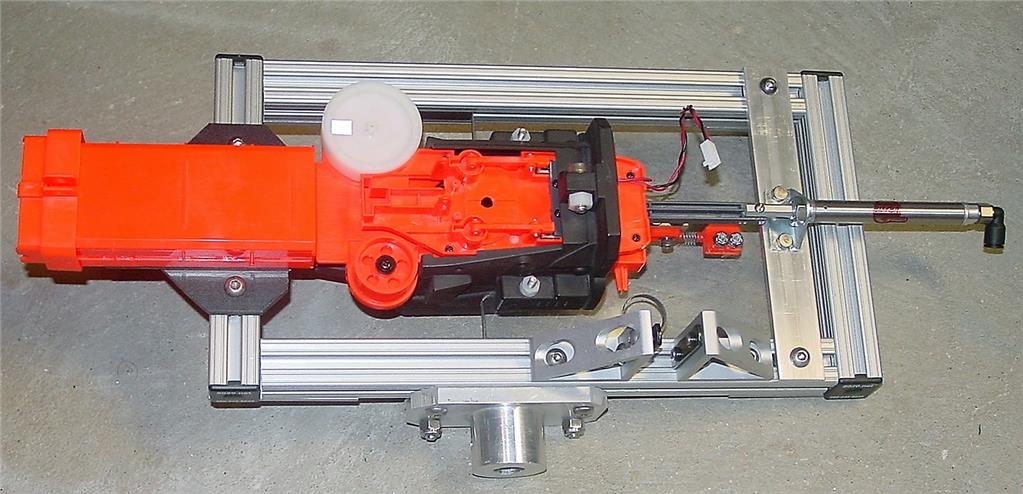 One of the hacked NERF disc launchers. The original motorized firing mechanism has been replaced with a single-acting pneumatic cylinder.
One of the hacked NERF disc launchers. The original motorized firing mechanism has been replaced with a single-acting pneumatic cylinder.
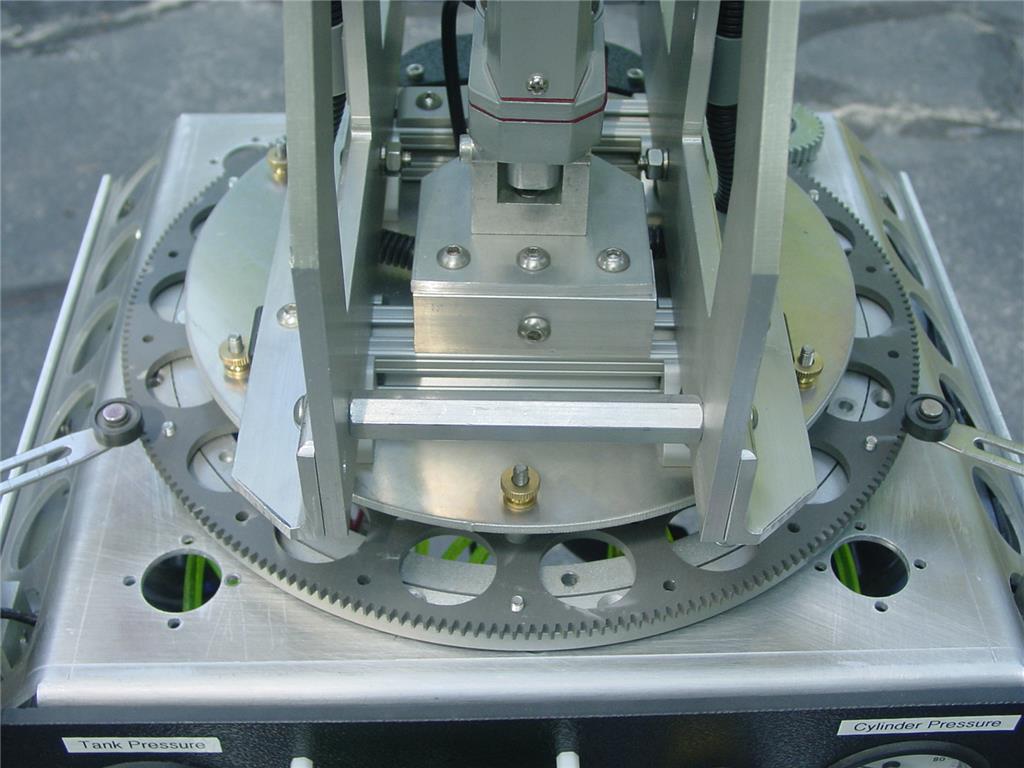 Gun mount secured to turret gear with brass thumb nuts.
Gun mount secured to turret gear with brass thumb nuts.
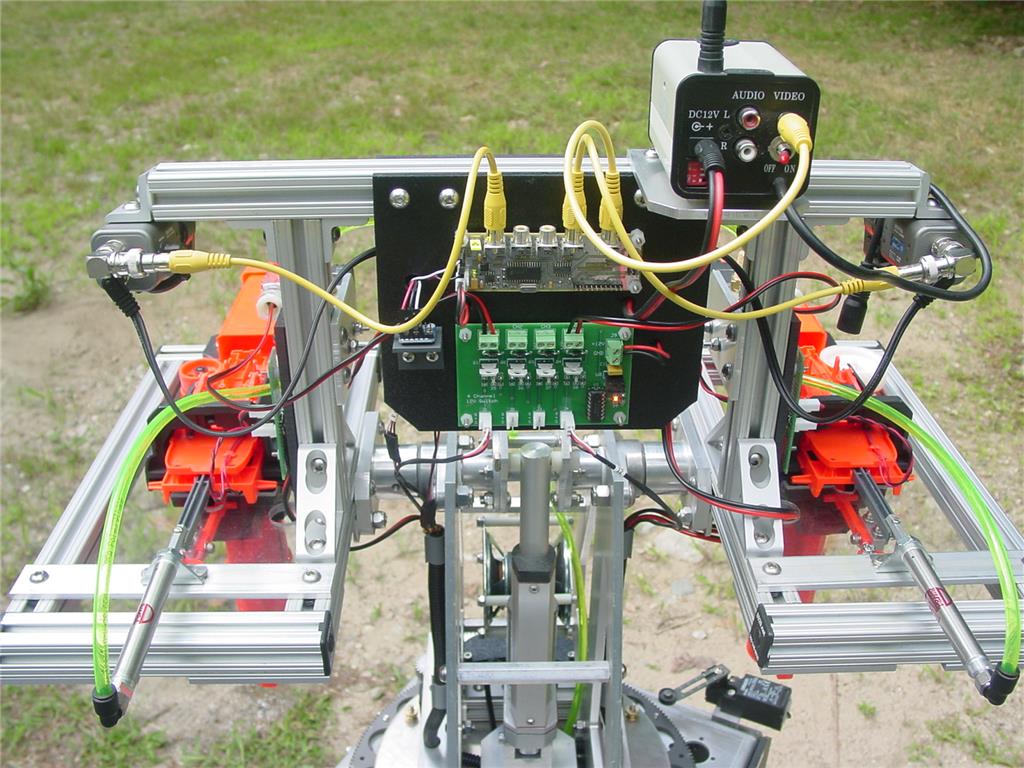
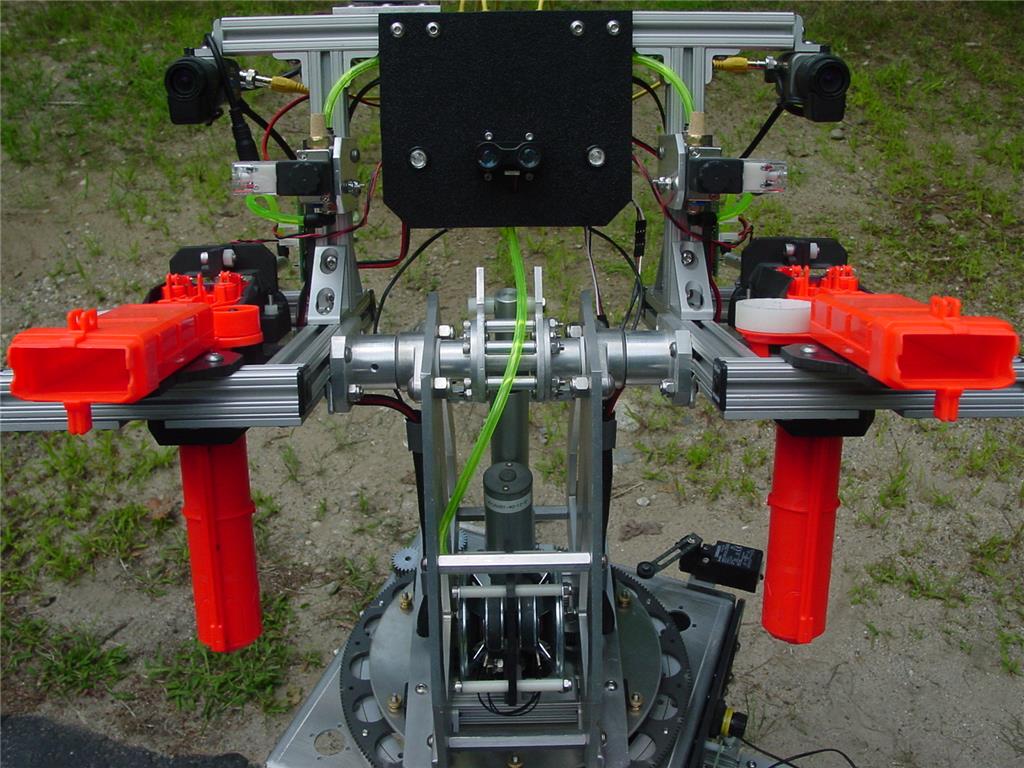 Front view of completed dual launcher. Each launcher has it's own inline video camera for target monitoring. A video mux directs selected channel to a 2.4 GHz video transmitter mounted on the top bar.
Front view of completed dual launcher. Each launcher has it's own inline video camera for target monitoring. A video mux directs selected channel to a 2.4 GHz video transmitter mounted on the top bar.
 Rear view of dual launcher. Using a script I was able to tune the timing of the pneumatic cylinder firing to unload both 20 round disc magazines in 6 seconds in full auto mode.
Rear view of dual launcher. Using a script I was able to tune the timing of the pneumatic cylinder firing to unload both 20 round disc magazines in 6 seconds in full auto mode.
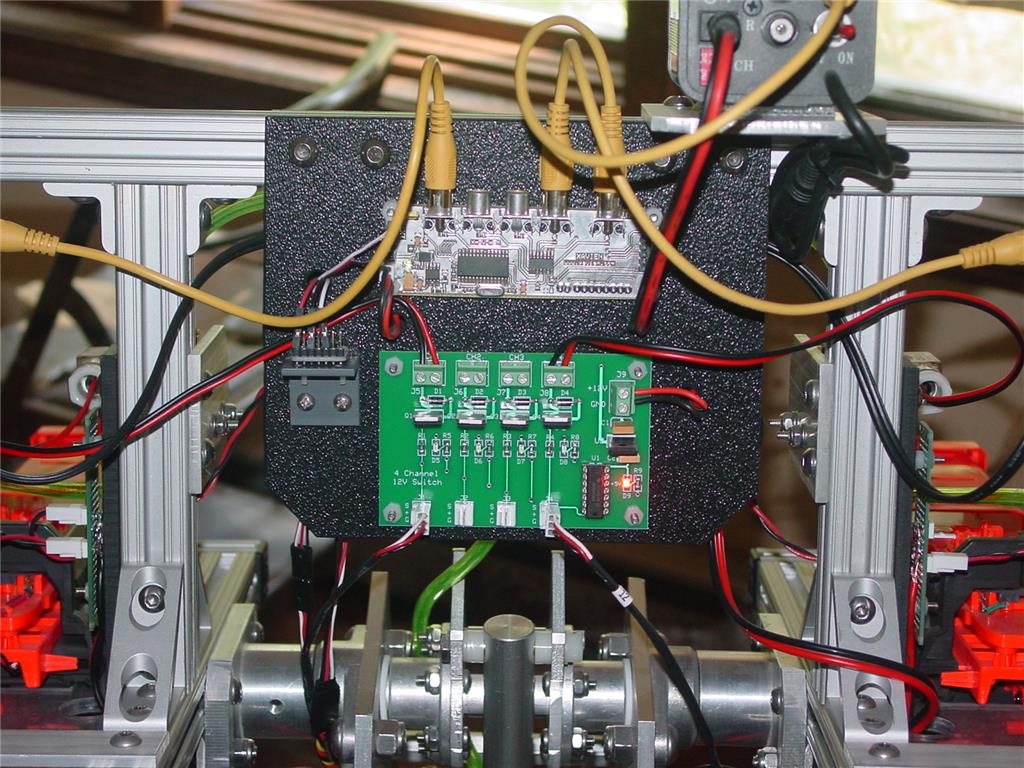 Close up of fire control electronics, video mux, and analog tilt sensor.
Close up of fire control electronics, video mux, and analog tilt sensor.
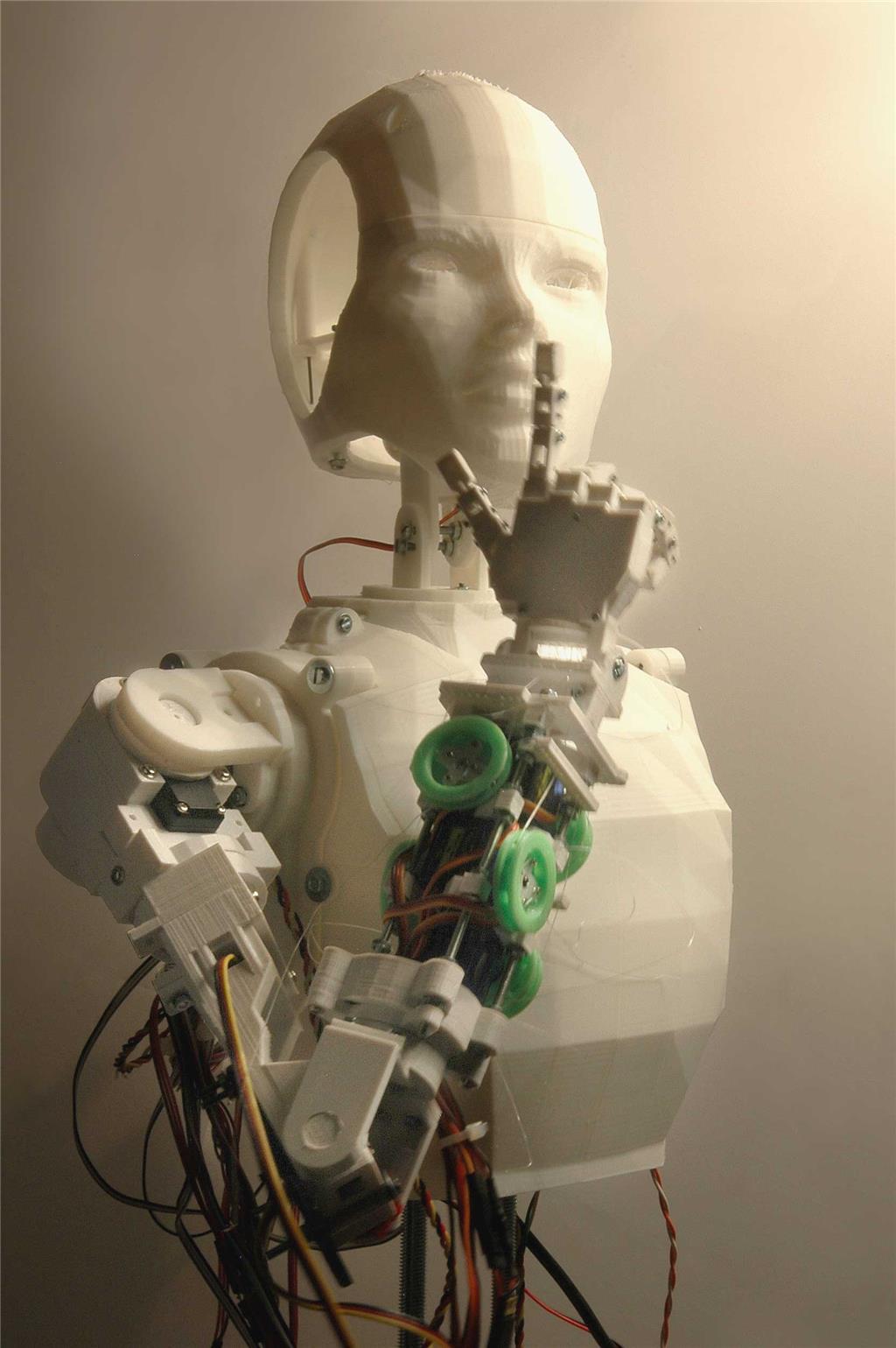
 Completed robot.
Completed robot.
 ARMadeus Mk. 11 disassembled into more easily managed subsystems for transport.
ARMadeus Mk. 11 disassembled into more easily managed subsystems for transport.
Other robots from Synthiam community

Faengelm's Roli The Climber
Mgodsell1973's Hexxy - My First Walker

Wow, very impressive bot!
Congrats on the article and getting on the cover of Servo!
Very exciting to see your project published! Great news to validate your hard work - and it shows. Thanks a bunch for sharing!
hope you stocked up on copies of that magazine!
Jim, that’s an very impressive build, it’s so neat especially the wiring, a real professional job.
The 6 channel servo Power Unit, was that a custom made unit, or off the self unit?
Congratulations on getting your project published.
Killer! :D
@cem
The 6V/15A servo Power Module is available from REV Robotics.
REV Robotics servo Power Module
Thanks Jim.
Chris.