
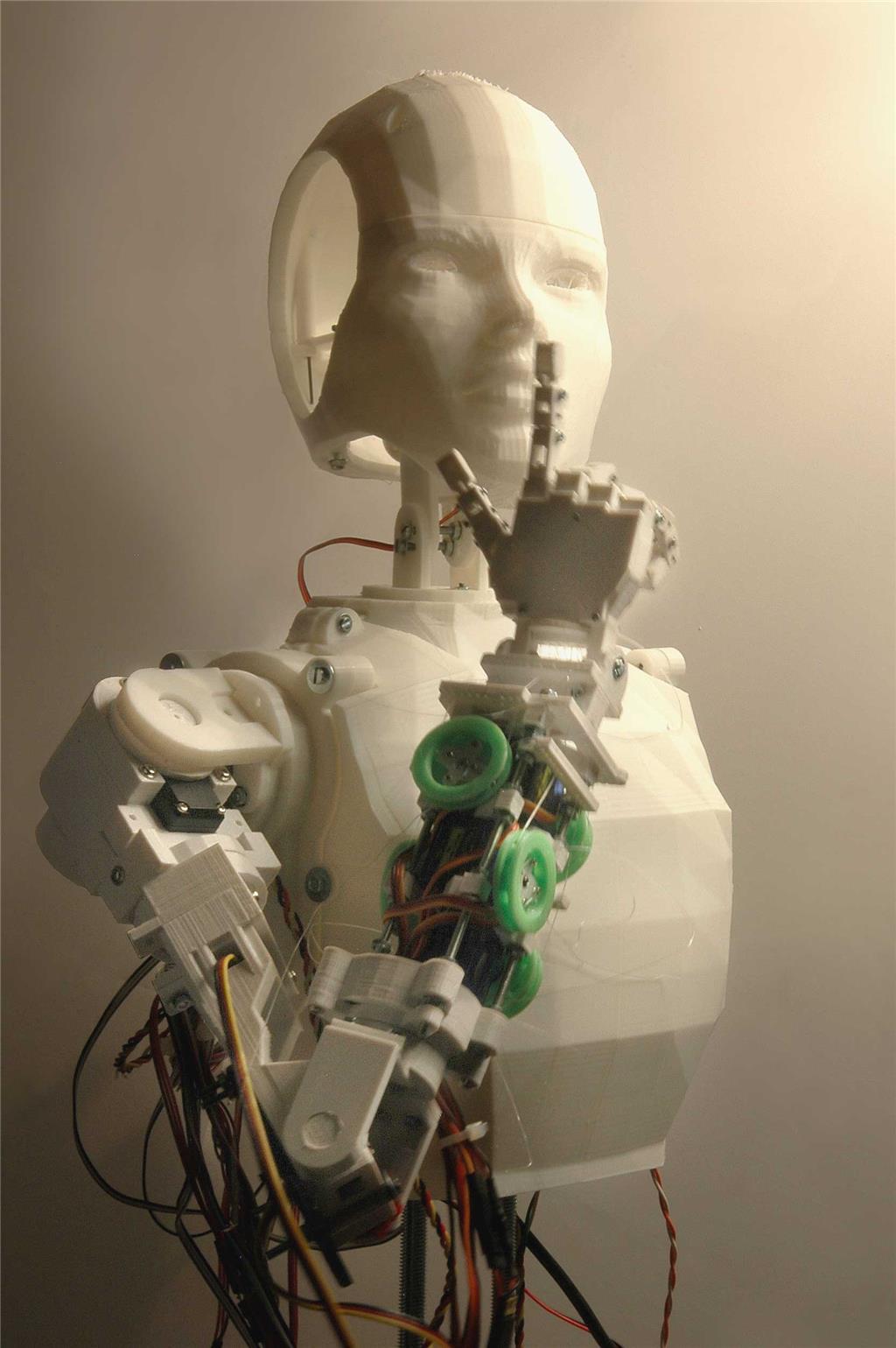
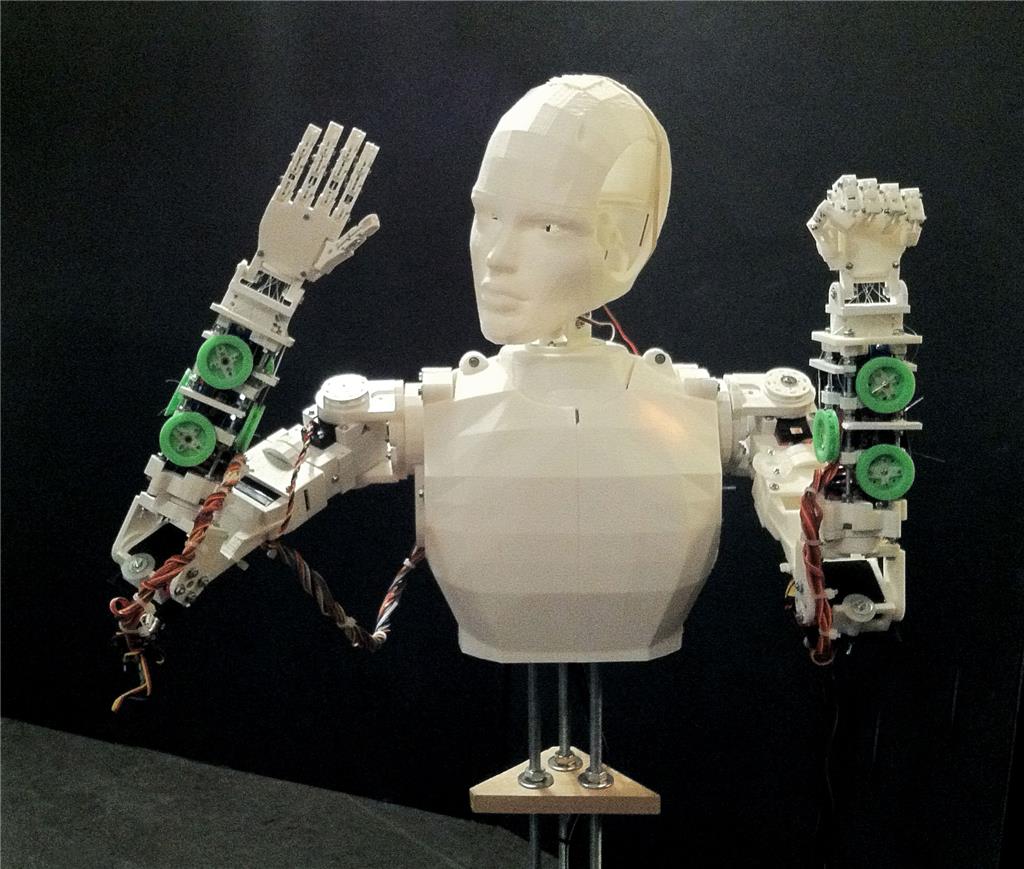
Buratino: 3d printed - 50x50cm humanoid robot with 23 axis of movement (full of heavy torque servos). (Arms - torso- head) Buratino will need motion tracking with EZB camera and speech recognition.
The last years I have been designing and developing several robotic platforms. These are projects that are made with 3D printing and some lasercutting (prototypes are already working on Arduino and pololu microboards.) I'm adapting my machines so they can run with EZB. I want to give them an easier user interface. Ideas are welcome!
By Buratino
— Last update
Discover more robots

DJ's Fisher Price Chatter
Strangest robot I've ever built, I had to build it. Can you blame me?

Daman's Metal Boxbot... Yes I'm That Impatient
BoxBot: EZ-B kit transformed into a box robot with mounted wheels and servos, speech recognition, face tracking and...

Haydenbot's Hayden's First Robot Captain America
Captain America robot built with loTiny EZ Robot controller and continuous servos; EZ Robot ramp-up scripts smooth...

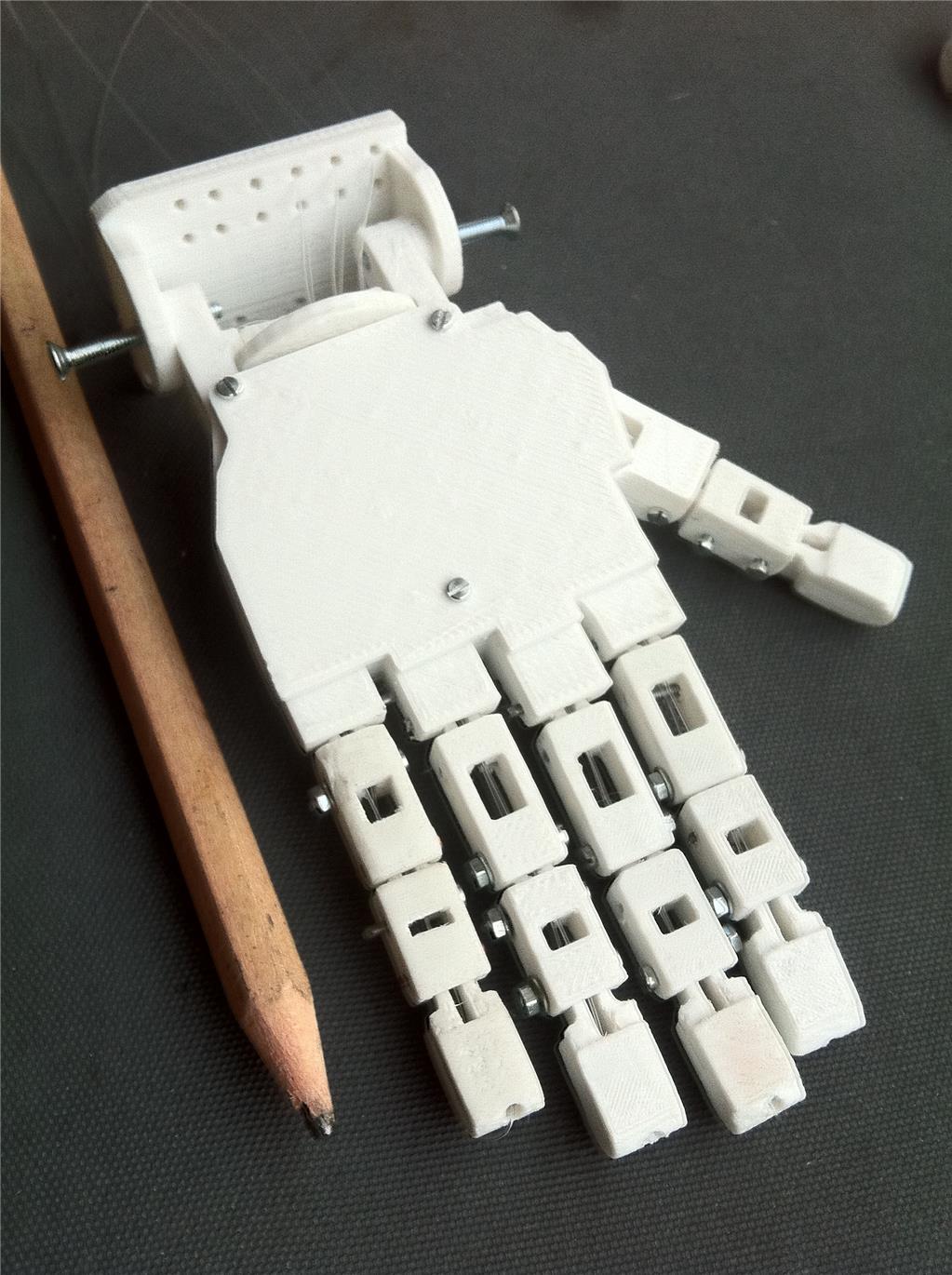
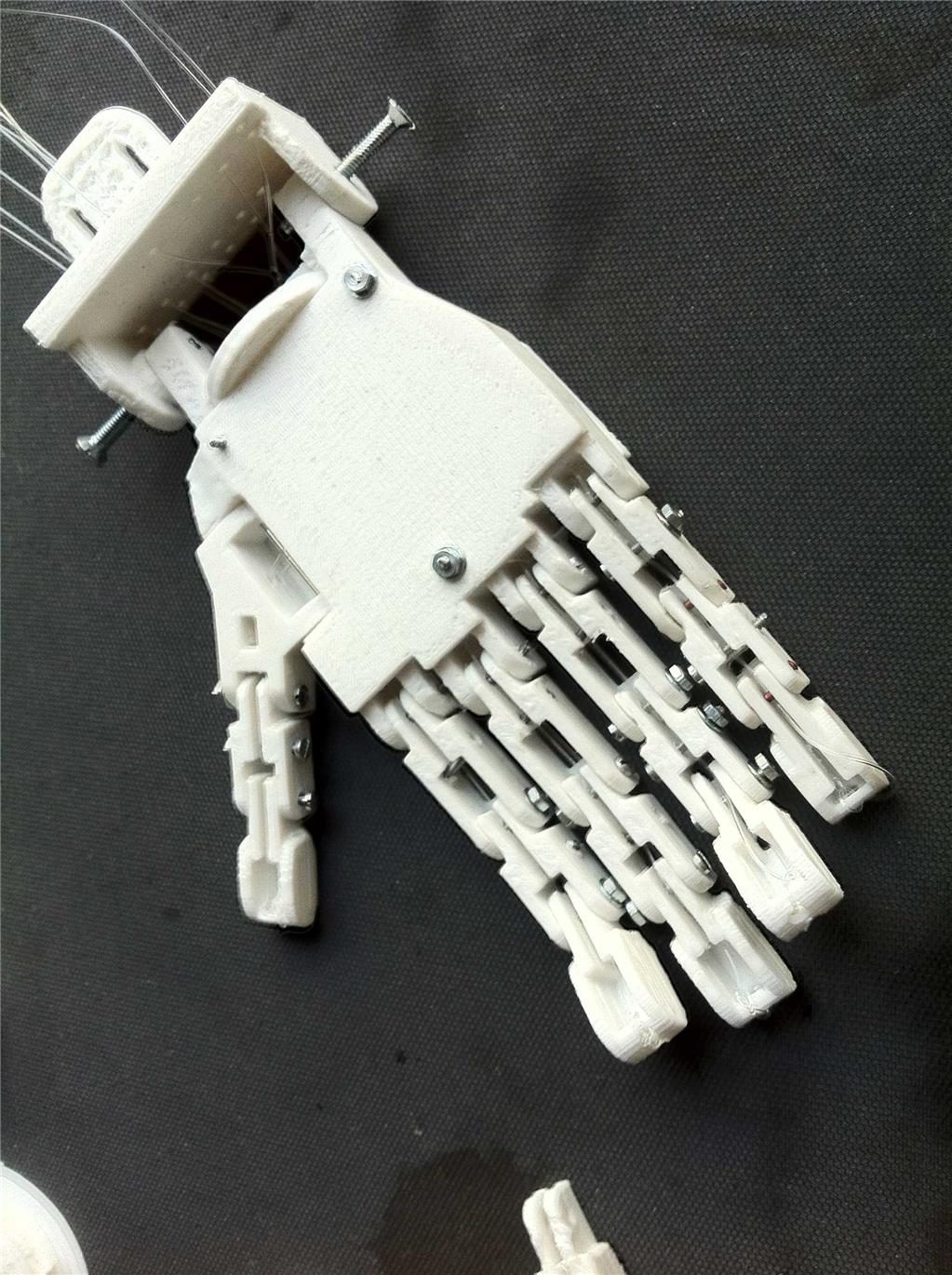
Looks great...interesting servo setup, its to drive the hands right?
Super nice robots!
Wow impressive ! Congratz !
Thanks for the reply guys! Really appreciated :-) Yes, the servo's in the underarms drive the motion of the fingers. The green spools are used to pull the strings which go through the fingers.