
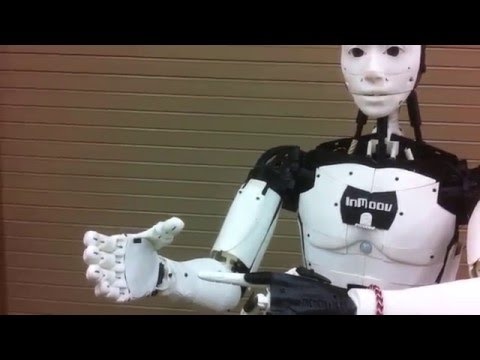

I've been working on a new hand idea for my InMoov robot. I seriously hacked the Exiii Handii. Their original design had the thumb and index finger moving independently and the other three fingers moving together. I changed it so that all of the fingers move independently and I managed to get all of the finger servos in the hand. I added a wrist movement using one of EZ-Robots Lever servos and the forearm and wrist rotation is from the original InMoov design. Of course it is all controlled with an EZBv4. Here's a video of it working.
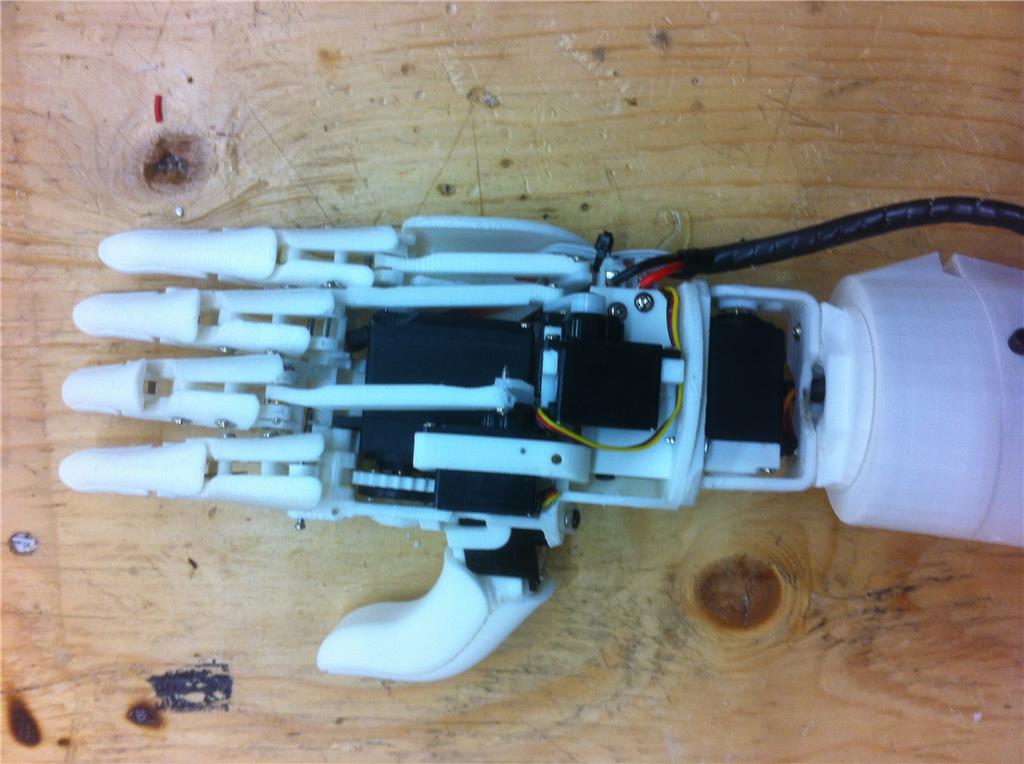
A picture of the back of the hand.
Then I got playing around with some Flex sensors sewn to a glove I made awhile ago when I first made my InMoov. It took a lot of work, back then, to get it work with an Arduino. So I followed the tutorial on Flex sensors by Steve G and it was EZ to hook up to the v4. Nice tutorial Steve! Sorry about the quality of this video.
My next goal with this project is to get it running with some ECG leads to control it by flexing muscles.
Other robots from Synthiam community
Oldbotbuilder's Baxter With Ax-12 And Iotiny

Oldbotbuilder's My Talking Robot, Lester

Fantastic Bob! You are showing some serious design skills.... way more realistic than inMoov's current hand(s). I would love to print this hand and experiment.... The fact you got all the servos in the hand is an awesome feat in itself... If there is a way to get the thumb to close too that would be over the top man.... Will you be creating a left hand too?....
Thanks Richard. I want to get it working with some ECG leads now. They have only released the right hand so make the left hand I'll have to mirror some parts with my CAD. The thumb movement is limited so, I'm going to play with it a bit more.
Hello Bob,
It looks phantastic.
Better then the original!
I know you are a genius, that why i am asked you.
Now i know what i am doing the next weeks!
The Inmoov comes now to the next level.
Do you have an idea for a cover for the Back of the Hand?
I am fall in love with this Hand!
Boris
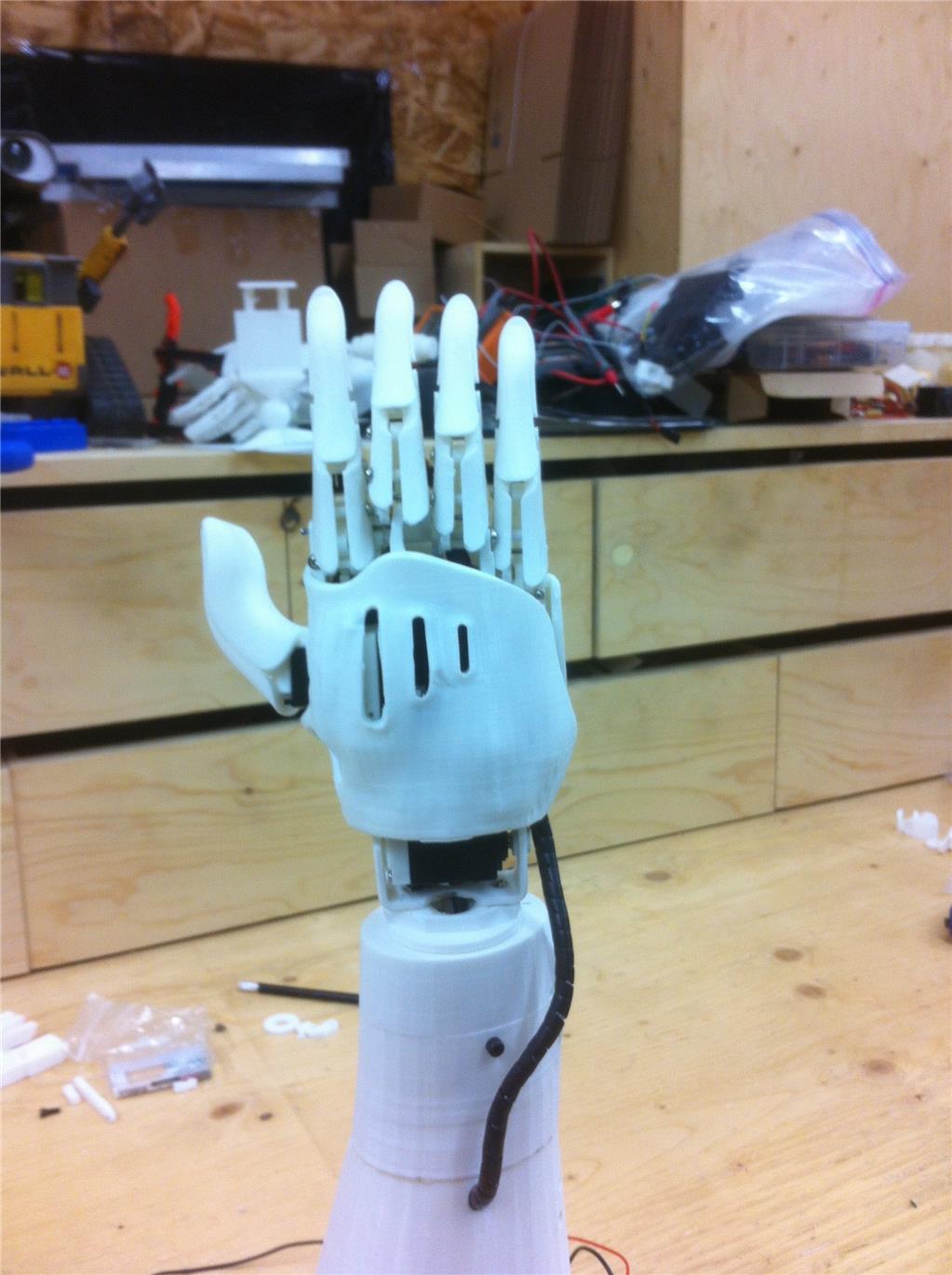
Here's a picture of the back of the hand with the cover on.
Wo Ho! That's Sickly cool and strangely disturbing. Bob, I'm so impressed and awed. I can't wait to see what barrier you break next. eek
That's pretty friggin awesome
Excellent job!
Thanks everyone. I'm continuing to tweak it, new thumb added today, once I get my hands on some ECG/EMG sensors, I'll take it to the next level.