


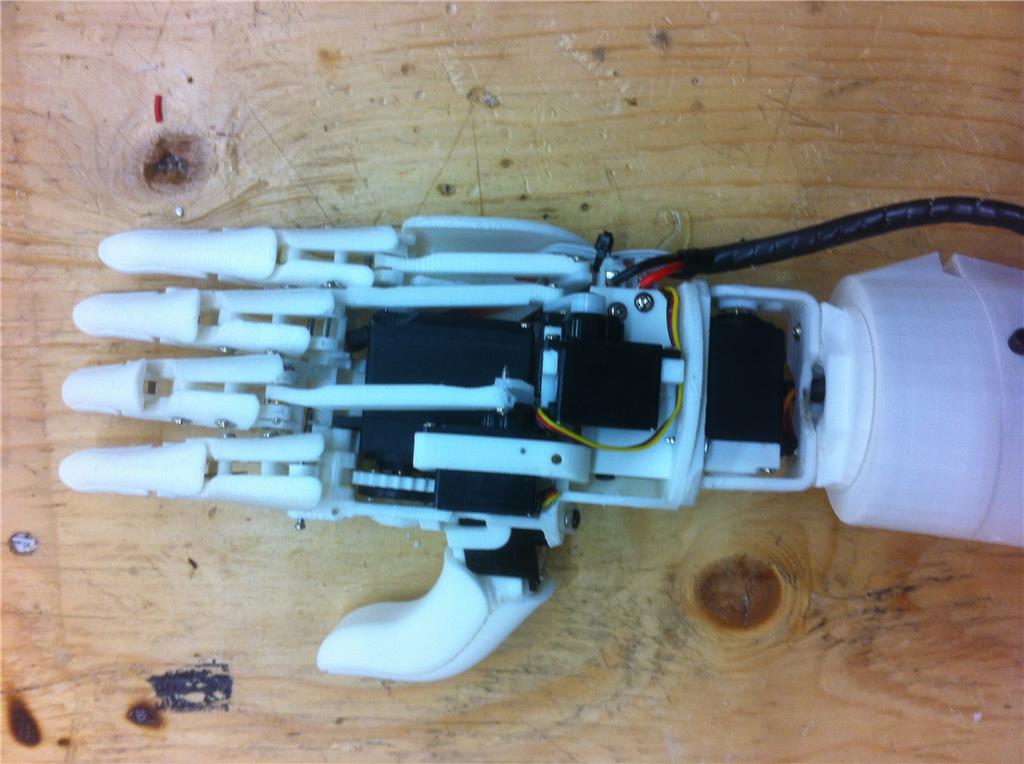
I've been working on a new hand idea for my InMoov robot. I seriously hacked the Exiii Handii. Their original design had the thumb and index finger moving independently and the other three fingers moving together. I changed it so that all of the fingers move independently and I managed to get all of the finger servos in the hand. I added a wrist movement using one of EZ-Robots Lever servos and the forearm and wrist rotation is from the original InMoov design. Of course it is all controlled with an EZBv4. Here's a video of it working.
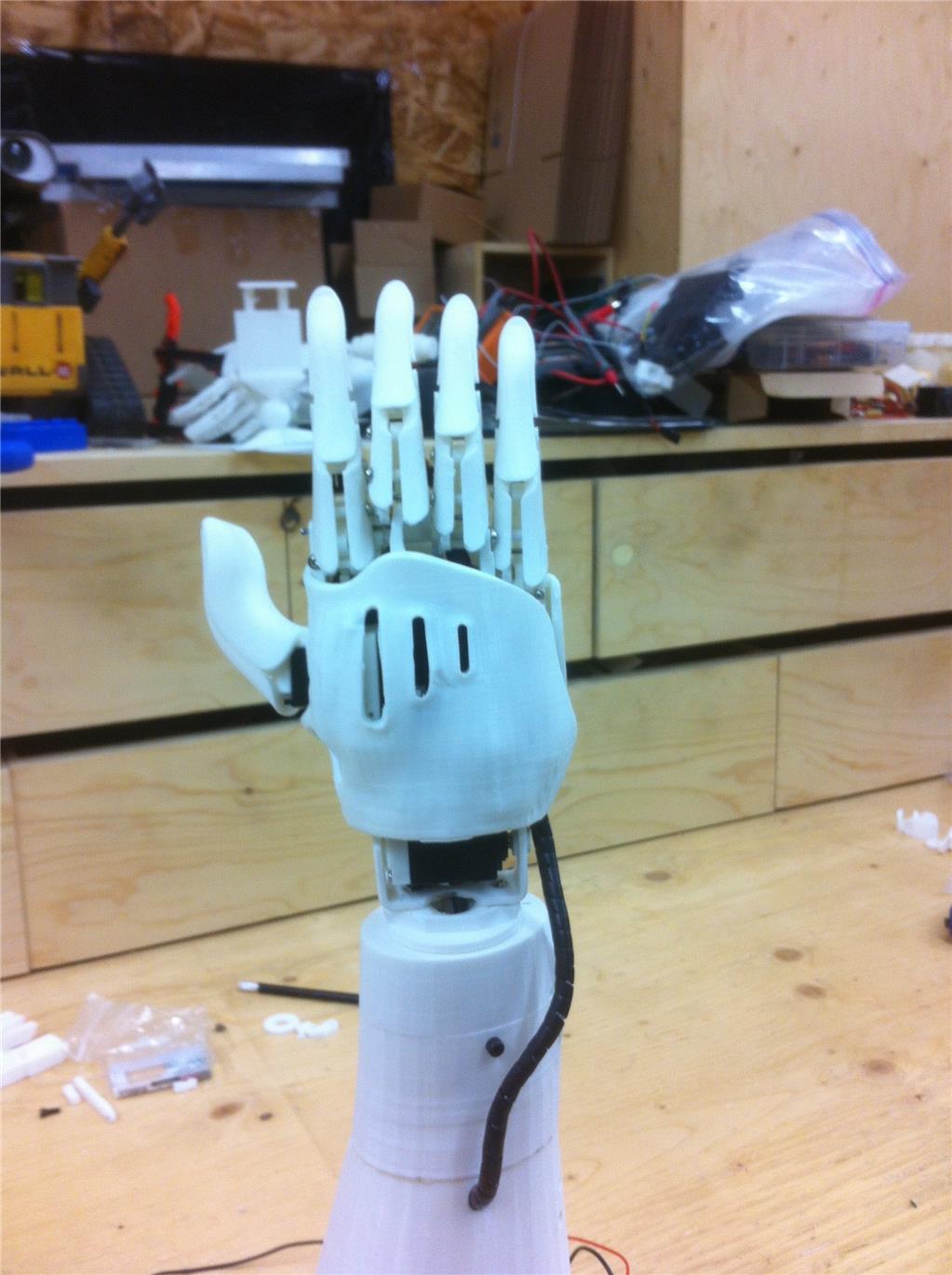
A picture of the back of the hand.
Then I got playing around with some Flex sensors sewn to a glove I made awhile ago when I first made my InMoov. It took a lot of work, back then, to get it work with an Arduino. So I followed the tutorial on Flex sensors by Steve G and it was EZ to hook up to the v4. Nice tutorial Steve! Sorry about the quality of this video.
My next goal with this project is to get it running with some ECG leads to control it by flexing muscles.
Discover more robots

Davidh's BOB
Steve1dh's Test-Practice Bot


Hi Bob,
i can't wait to print your cool new hand also for my Inmoov.
Do you check with your new Hand to grap a Coke-Can or something diffrent?
Boris
That's great Bob. Started watching the video and I was thinking "that hand has got some nice fluid movement". Then I saw your hand appear with the flex glove... and I was even more impressed. Seriously cool.
Thanks Steve, like I said in an earlier post, connecting that glove to an Arduino was a ridiculously labourious task. With the help of your tutorial it was ridiculously EZ to get it working with the v4. Standby though, I have finally got my printer to print flexible filament, so I am working on another hand design which, so far, looks like a better alternative.
I hacked another hand design - https://www.thingiverse.com/thing:380665 adding 5 EZ-Robot micro servos in the hand and 2 heavy duty servos for the wrist. The flexible joints in the fingers makes it easier to grasp objects.
Hello Bob,
cool your new Hand!
But now its difficult to say what is better (both version are cool)
Your are the Expert, so what is your opion? Which is better?
Better to print, better for craping things?
What i see until now, the new hand looks definitiv more like a real Hand!
You know if people have a choice, the problems beginns ;-)
Boris
PS:
But all new Hands are better then the old one!
Hi Bob,
other question:
Do you think about to install pressur sensors to the fingers?
Maybe its possible to make a little hole in the inside of the finger tops
only 0,2 millimeter inside and 5 mm circle
for the fsr400short
https://www.produktinfo.conrad.com/datenblaetter/1000000-1099999/001008977-da-01-en-DRUCKSENSOR_FSR400SHORT.pdf
so then its possible to glue the Pressur Sensor inside the finger (thats why the hole - the pressur sensor will be with the finger in one piece)
and check out the pressur.
It only a idea - or do you have a better idea to check the finger pressure?
Boris
PS:
After 5 times watching the new hand (with flex) i like it really much! More and more
Hello Bob,
do you check this FilaFlex Hand Version from April 2015:
https://www.thingiverse.com/thing:754513
Boris
@Renta, I'm not going to say the flexible hand is better than the original hand Gael created, I would never knock what he has created. The flexible hand design is different though and by adding in the servos for the finger movements in the hand makes it possible for the additional wrist movement. The flexible joints help it to conform well to irregular shaped objects. The Handii hand doesn't grasp objects very at all. Watching the videos, I think it was made to pinch small objects between the thumb and index finger - and that's about it but it does that well. Adding pressure sensors in a few key locations would definitely good to do as would adding some rubber pads, to improve the grip. Maybe they could be integrated into one. Something to work on.
I'm going to try and print the Flexible Fingers - looks tough, I don't think the flexible filament will work well for the supports needed.