

I bought this Wall-E about 3 years ago, and I thought it was the coolest thing. I played with it a few times, and shortly after, I began to get bored an thinking how cool it would be to turn it into an actual working bot.
I never really stumbled into anything that would get me hooked (Arduino was one idea when I got introduced to it a year and a half ago, but I was living abroad and my Wall-E was packed away, literally an ocean apart from me).
So a while ago I found EZ-Robot by accident (looking at Make and SparkFun websites for cool components to incorporate into my 2 robots - I also own a RAD v1.0, still sitting tight in the waiting room for his turn to get a makeover surgery) - and the first robot platform I saw being converted was this cute little brother of my long forgotten yellow friend, the Wall-E. Yaay! ;)
So 3 and a half years of waiting, and I am finally at the early stages of turning my old dream into a reality, by making my Wall-E sing and dance (and hopefully do more interesting stuff) under my command.
Last evening I started disassembling him, and in my first post I wanted to only document and share that part of the process with you. With a few remarks that I found interesting throughout. So I hope you enjoy and comment. ;)
Start of separation of base from main body:

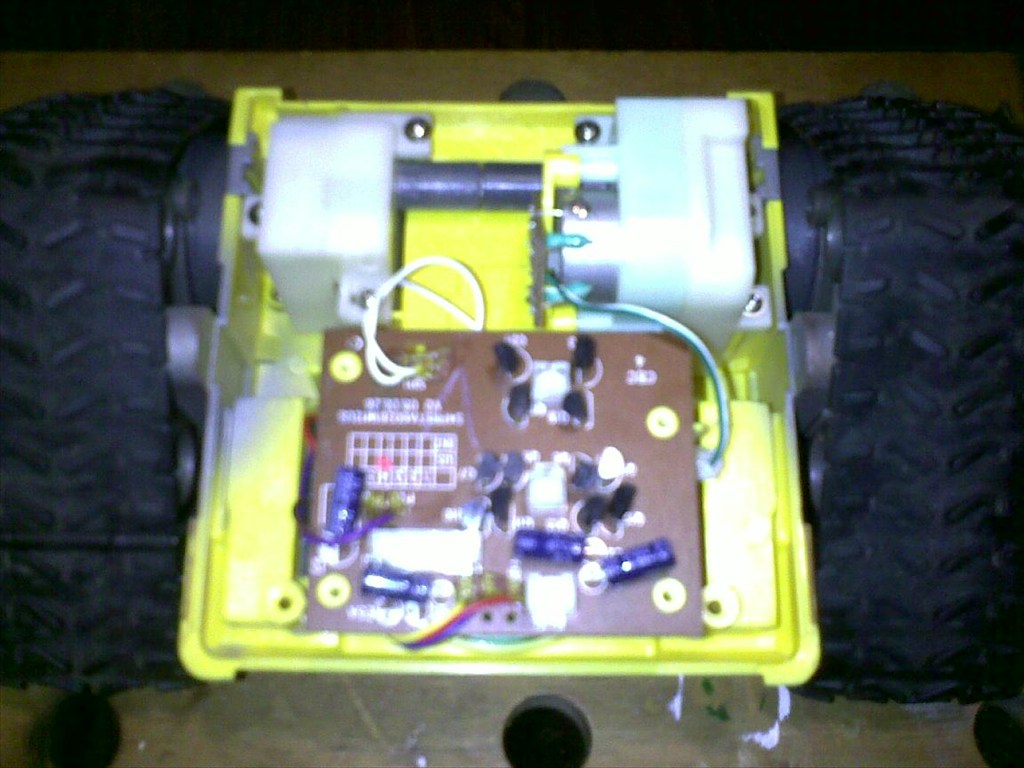
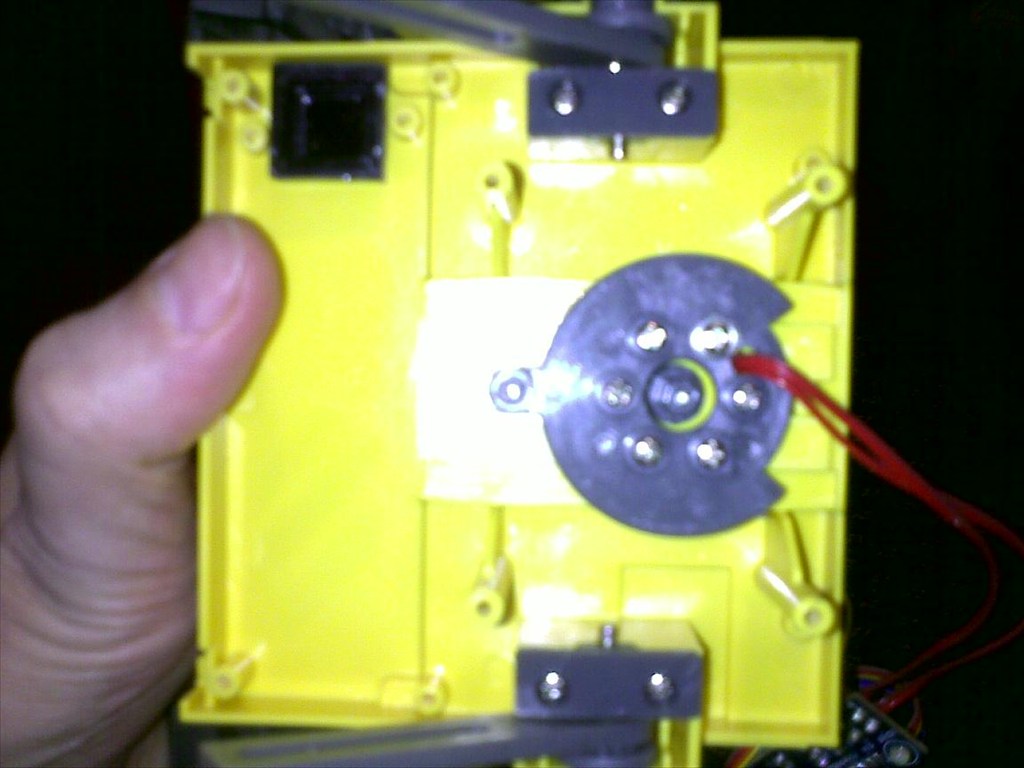
The back of the main PCB showing the "do-it-all custom processing unit" (or, as I call it, the "Big Blob of Black Plastic"):
 Yep. I was expecting to see something like that - it's virtually impossible to know what the hell is going on under that blob of plastic, unless I get an oscilloscope to look at the signals coming in and going out, and then if I can come up with a truth table for addressing the various sound samples stored in it, then perhaps I could reuse these instead of buying an MP3 trigger board from SparkFun.
(Of course, with a DSO203 handheld scope costing $200 bucks against $49.99 for the MP3 trigger, it's really a matter of dollars and cents against satisfying my scientific curiosity ;))
Yep. I was expecting to see something like that - it's virtually impossible to know what the hell is going on under that blob of plastic, unless I get an oscilloscope to look at the signals coming in and going out, and then if I can come up with a truth table for addressing the various sound samples stored in it, then perhaps I could reuse these instead of buying an MP3 trigger board from SparkFun.
(Of course, with a DSO203 handheld scope costing $200 bucks against $49.99 for the MP3 trigger, it's really a matter of dollars and cents against satisfying my scientific curiosity ;))
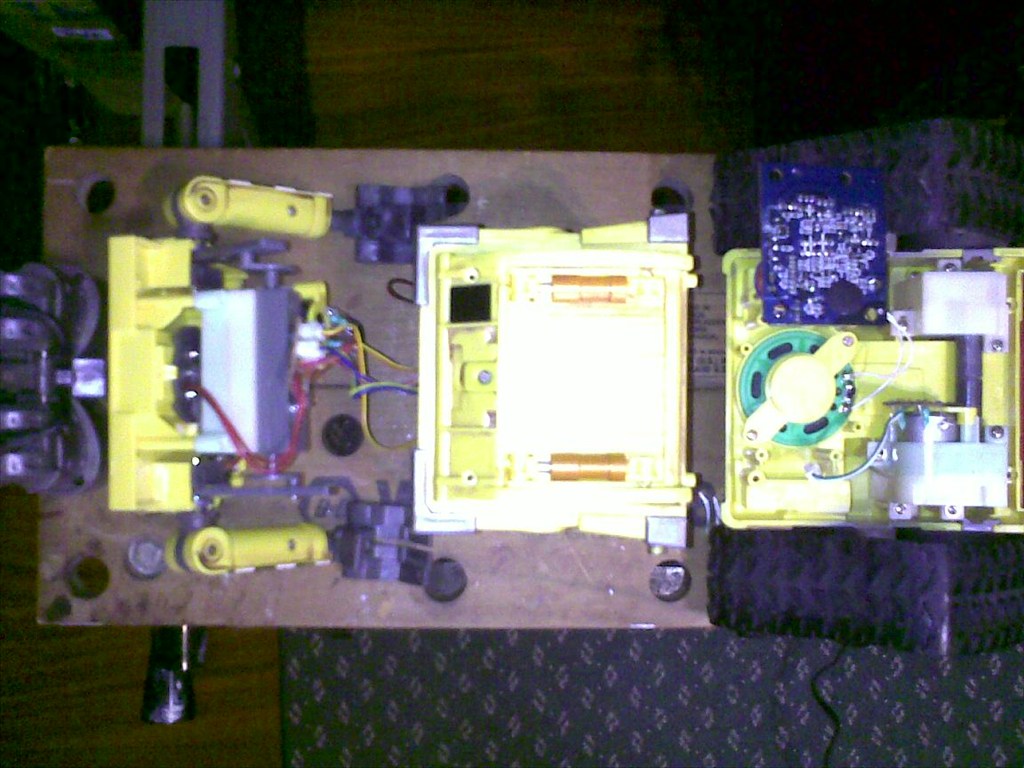
Couple more inside pics:

 The first thing I noticed is that there are only two motors in this robot - nothing else. All of his movements are coordinated via some very complex crankshaft gearbox mechanisms, activated timely by the big blob of plastic processing unit - one gearbox sits in the base, controlling the wheel movements (forward/reverse/turn/backward), and another is installed in the upper torso and controls the head rotation, eyes up/down and arms up/down movements. I have to tip my hat to the engineer who designed this. A whole lot of movements accomplished with just two ordinary DC motors. Unfortunately, these will have to go (although I am willing to perform some quick experimentation with driving the base gearbox, with the EZ-B board hooked to the existing H-bridge, just to see if I can simulate it going in all directions as I please. If I sense some kind of limitation, then it's definately gonna go.)
The first thing I noticed is that there are only two motors in this robot - nothing else. All of his movements are coordinated via some very complex crankshaft gearbox mechanisms, activated timely by the big blob of plastic processing unit - one gearbox sits in the base, controlling the wheel movements (forward/reverse/turn/backward), and another is installed in the upper torso and controls the head rotation, eyes up/down and arms up/down movements. I have to tip my hat to the engineer who designed this. A whole lot of movements accomplished with just two ordinary DC motors. Unfortunately, these will have to go (although I am willing to perform some quick experimentation with driving the base gearbox, with the EZ-B board hooked to the existing H-bridge, just to see if I can simulate it going in all directions as I please. If I sense some kind of limitation, then it's definately gonna go.)
Finally, taken the upper body (head + arms) and torso apart
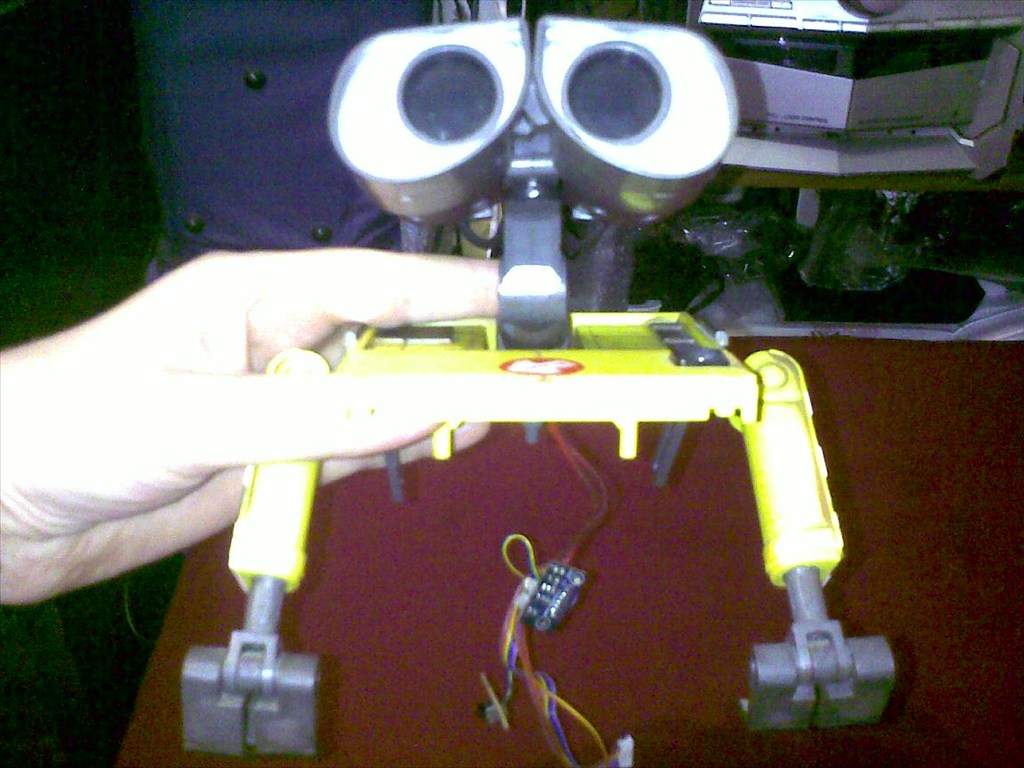
Front view of the upper body (head + arms)

Couple more views from upper body section

Detailed view of the underside of upper body section, showing the hinges for the arms and the head rotating + eyes up/down mechanism (center)
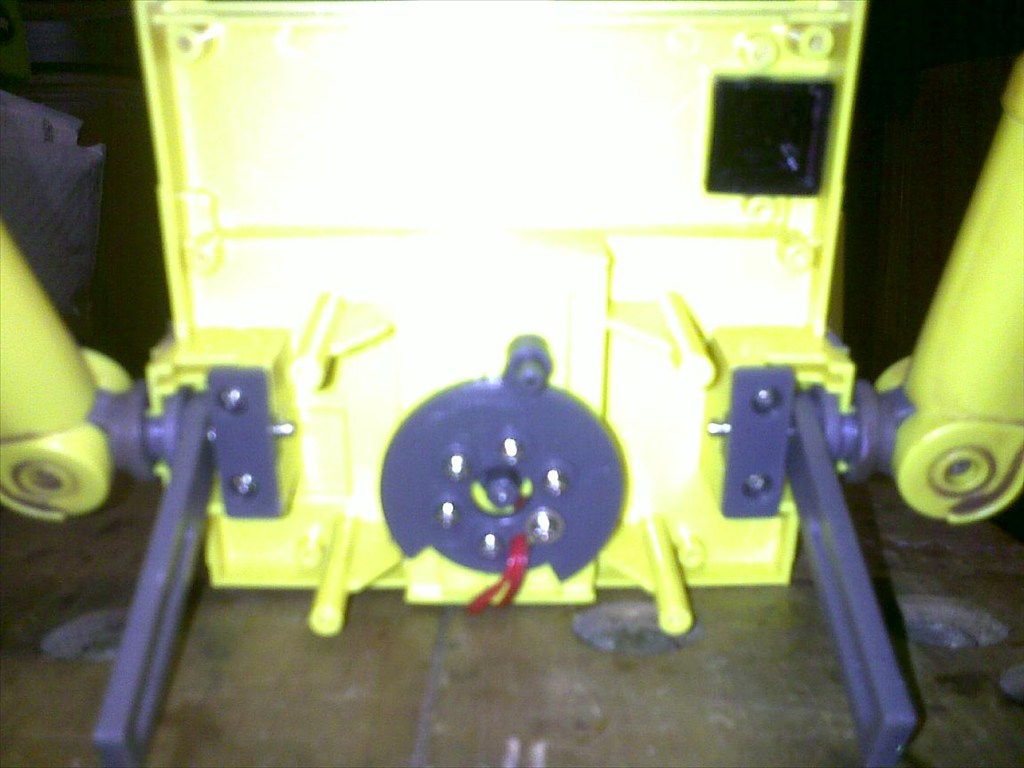
 The arms are actuated by these linkages, which in turn are hooked to round actuators connected to the upper torso gearbox. When these actuators rotate, they drive the linkages to move side-to-side, thus driving the arms up/down. I was thinking, maybe instead of cutting the arms and gluing them directly to the servo head reusing these linkages and gluing the servos to the inside of the upper body section, to make the whole looks more unobtrusive. The same thing could be done to the head rotating and eyes up/down round linkages, it would be farily easy to attach a servo to it.
The arms are actuated by these linkages, which in turn are hooked to round actuators connected to the upper torso gearbox. When these actuators rotate, they drive the linkages to move side-to-side, thus driving the arms up/down. I was thinking, maybe instead of cutting the arms and gluing them directly to the servo head reusing these linkages and gluing the servos to the inside of the upper body section, to make the whole looks more unobtrusive. The same thing could be done to the head rotating and eyes up/down round linkages, it would be farily easy to attach a servo to it.
Side view, with close-up on the neck

 Here's the challenge: The neck is cast into a whole piece of plastic and in order to get the entire head to actually bend up/down, I would need to find a pivot point somewhere that I could attach a horn and link it to another servo, hidden under that section. As of yet, I cannot see a solution that would not involve gutting the neck (I think someone in the forums did something using the camera hinge, I may have a look at that and see if I could confidently replicate it.)
Here's the challenge: The neck is cast into a whole piece of plastic and in order to get the entire head to actually bend up/down, I would need to find a pivot point somewhere that I could attach a horn and link it to another servo, hidden under that section. As of yet, I cannot see a solution that would not involve gutting the neck (I think someone in the forums did something using the camera hinge, I may have a look at that and see if I could confidently replicate it.)
Other robots from Synthiam community
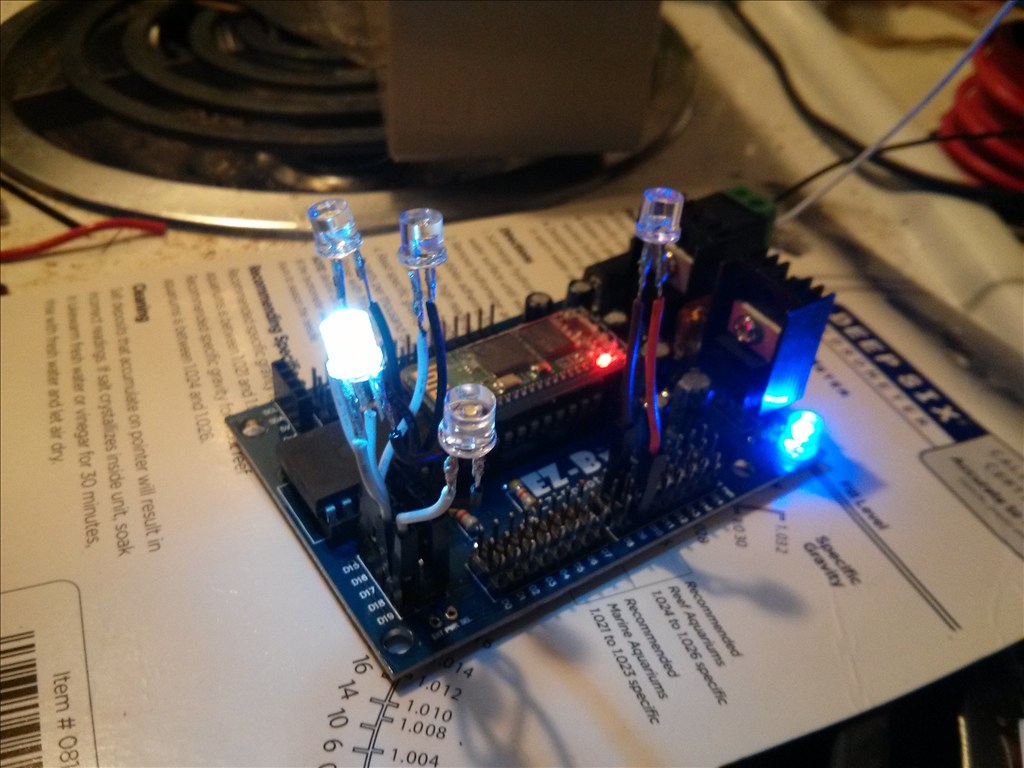
Jstarne1's Easy Led Visual Test For Digital Ports Tutorial J...
Nink's Development Kit Robot


Good tear-down posting ya young pup :P
Looks like there should be room in the body for the EZ-B and perhaps a LiPo RC type battery if you replace the plastic linkages and mechanics with discrete servos instead.
Your neck solution will be interesting... I would almost consider casting vacuum formed shells and mounting them over an internal mechanical linkage/servo based frame? Fairly small scale to work on though.
There's going to be lots of room after trimming out the unnecessary body parts! Check it out: The main body will be pretty much a hollow shell, bearing only the battery compartment (seen on the right with me holding it next to the main body) and I think there's gonna be plenty of space for servos and such affixed in the internal walls...
The main body will be pretty much a hollow shell, bearing only the battery compartment (seen on the right with me holding it next to the main body) and I think there's gonna be plenty of space for servos and such affixed in the internal walls...
I'm going to try and pry (pun unintentional) through the neck assembly now. Ta. ;)
Yea whenever I start modding I try to cut out as much junk on the inside as possible to make more room. This is completely up to you but I would recommend ditching the neck and getting a pan and tilt. The other walle projects I have followed could not fit a battery inside their walle because they were trying to keep the original neck yet make it move around.
The pan&tilt is not a bad idea at all, I was kinda thinking the same thing today when I was looking at these.
I have this one idea I wanted to try out, it involves a little gutting of the neck and installing a couple micro servos inside the head and one on the underside of the torso. If I mess it up, I can use the pan&tilt as a B plan.
Besides the items above, I wanted to try this one, but I wanted to see if I could get this completed set - the problem I see is that I couldn't identify all the parts in the drawing in their store, and another thing is they barely give out any measurements so I cannot have a rough estimate on whether these parts would be a fit to my Wall-E. I might need to drop them an email and ask for all the SKUs and measurements.
Micro servo wont hold up the head unless it is really high torque for a micro. I personally will go for Walle w Apocalypse upgrades ;)
I'm sorry @jstarne1 but I did not catch your drift - what are those upgrades? confused
I figure I would do a walle in metal / silver color scheme , give him red or green eyes , more aggressive tracks and maybe different arms. Imagine all those people land back on earth and start fighting over crops , and property and now walle has to defend the wasteland he calls home. So he grabs parts from bigger robots and upgrades himself. Yup its all made up but I just want to do a different walle.
Another words customization instead of making him look just like every other walle
I get it - I did get that from the beginning after you replied to my post saying I was gonna do a Wall-E on the other thread.
I appreciate your suggestions and I do understand where you come from, as a very seasoned builder. I do consider your opinion to a high degree, but before I go out making an autobot transformer out of my Wall-E, I need to be sure I can disassemble and re-assemble it successfully, with the minimum goal of successfully upgrading it with all of the kit's functionalities while still being pleasing to the eye (as in, doing a good job overhauling it without just hacking plastic parts with a bare soldering iron).
At the same time, I wanna introduce some new stuff to it (like replacing the phony grippers with workable ones; an idea which was partly inspired by your comment btw), that are easy enough for me to confidently fit them in. And maybe leave room for future extensions and modifications as I grow my confidence in my building skills.
I won't promise right now that I can make both of his eyes glow, as there is only room inside the space where the eye is for either the glowing LED that sits right now behind the eye lens, or the camera. I am currently focusing on the difficult task of putting the head back together, providing it with moveable and tiltable (and "frow-un-frownable" eyes) action. That is my current challenge, because I wanna do it in a nice and easy way - hence my willing to employ mini servos; I was having a feeling that these would do, because the entire head assembly itself is not really a heavy item?
Hi. I have a problem wit my Wall-e U command robot. I put him together but dont know how to make him talk. Do you have any ideas? Thank you!
alexbjj, you know better than stealing a thread.
Not to mention posting twice.
WMoecke, I will be looking forward to see how you do the neck.
Ive got the horizontal servo in place but not sure on what to do about the tilt.
Hi (if there's still anyone monitoring these posts).
A bit of an update (quick and dirty, just to try and get started again): After my initial idea and further discussions with other members in this thread, I began to plan and order some of the parts I would need to build my cool Wall-E EZ-working replica out of my old yellow buddy.
To my dismay and utter frustration, I've had many disappointing experiences from various parts suppliers in the US, especially citing SPARKFUN here. I'll get back to that later in this post.
Mainly for that reason, I've completely lost motivation to keep going on, and my old yellow buddy W-E's pieces were set aside in a cardboard box away from my sight, along with my unused EZ-Robot kit.
Now on to the full story: thanks to both members Gunner and jstarne1 I was pumped up to build the coolest W-E variant possible - I wanted to apply as much off-the shelf parts (micro-servos attached to mini-grippers, a 360° rotating head with pan & tilt, the works) as possible, so I had placed an order of over 90 USD in one shop that had all these cool little things (I can't remember the shop's name, but it was quoted in the forums more than once - they seem'ED to have lots of servo accessories and mechanical stuff for sale. Apart from those, I also ordered an MP3 Trigger board from SPARKFUN. Little did I know about what was in store for me the following months.
After about a week from my placing my order with the servos & accessories shop with absolutely no confirmation, no replies, nothing... I began inquiring them. One nice day, I get an email stating my order was put on hold INDEFINATELY - just that. Nothing more. No details. Looking at my order details, I realized they put it on hold due to them not having any of my ordered parts in stock (I ordered about 10 different items!). I was baffled. So this is the way I get to know about it. I cancelled my order, lucky to be issued a full refund (at least).
Different story with SPARKFUN. I was sent an email "confirming" that my order was being "shipped" via USPS as I requested. "Good", I remember thinking, SPARKFUN being a "highly regarded" shop that sells electronics to all parts of the world and is mentioned everywhere. I believed them, and waited. Patiently. Hopefully. 20 days had passed, no package arrived. Got in touch with them, asking for possibly some sort of tracking number. The person replying said that due to my chosen delivery method (USPS) I was "not entitled" to tracking. "Had I chosen FedEx", then there would be tracking and other bells and whistles, they said, but for that, I would have to pay over 50 USD extra on top of my order.
Remeber folks, this is nothing more than a pc-board in a blister package, that would easily fit in any small bubble-wrapped envelope and would have come through easily, as many orders I had coming in from China and Hong-Kong before. Many. Some in medium-sized and some even in large boxes. All thru. Anyway, they offered me to re-ship the product, and I naively accepted their offer. Again, they "kindly suggested" I choose FedEx this time (all extra charges on me, of course), to "ensure proper delivery" - WHAT THE HECK is wrong with USPS, I wonder? If both China and HK Post can get stuff properly delivered to my doorstep, how bad could USPS be? I would not pay over 50 USD just to have a stupid envelope with a pc-board handed over to me by a purple-wearing FedEx employee! Not to mention that express delivery from these people (FedEx, UPS, etc) ENSURES 60% taxing pending delivery as opposed to postal delivery. So no, I'll take my chances with USPS thank you very much. I have a choice not to overpay. I have nothing but prior positive experiences with it. I take it.
Then again, another 20 days passed and nothing arrived. Then this time, contacting SPARKFUN was a ton of frustration. I simply was told that due to over 20 days FROM THE DATE OF MY ORDER being due, there was nothing they could do except to offer me "store credit" - what the heck would I do with that, if they cannot deliver anything not ordered to FedEx delivery? Order another MP3 Trigger and pay ANOTHER USPS charge (something around 18 USD if I recall) and wait for nothing to come? AGAIN? Why do they even offer any other shipping option if FedEx is THEIR option of choice?
So at this point one can only imagine my anger and regret. I will never, EVER order ANYTHING from the US EVER AGAIN, especially SPARKFUN - since they could never provide me any evidence of having actually shipped out anything to my address, I can't help but think of these people as robbers. They know they would never get away with something like that with orders placed from within the US, so they do these things with south americans like me, who cannot do anything else past the point they say "We're sorry, better luck next time buddy".
I cannot sue them, I can't have what I purchased, and I cannot have my money back. Ha-hah.
Ok, that's enough for my sad story, now on to the present time: I was adamant not to ever touch that robot again, but I consistently get poked by both mother and sister, pouting about "the poor W-E being stuck at a corner, he was so cute, can't you at least put him back together as he was for me to have it for myself". No. It is mine. Every scattered piece of it. So after considering the high costs involved in havig my EZ-Robot kit purchased and then delivered to me via Hong-Kong (and paying tax), I started thinking again, in putting it together as an EZ-Robot kit conversion.
I decided that it will be a copy of DJ Sure's conversion, using purely the contents of my EZ-Robot kit, with no extras (sorry Gunner and jstarne1 and other members) - That's just the way it is. But it still hurted me, that I would not be able to make it speak. I will definately NOT buy another board from STEAL-FUN (sorry, SPARK... ah whatever - you know what S-F? Don't like me calling you robbers, sue me!). I found a couple resellers in Brazil who deal with their products, but unfortunately, none of them sell the MP3 Trigger. The closest I found was the MP3 Player.
There are a few similarities with this board to the MP3 Trigger: it does respond to serial commands, and has a TF card slot, but then the serial commands seem to be totally different. According to this document, the serial commands can be sent as a ASCII character set string, specifying the words in proper order (e.g., 'p' followed by a number from 0 to 255 to specify which file to play). I could not find a similar document (user guide PDF) for the MP3 Player board, all online tutorials discuss programming the Arduino to play the files. But this one provides a C code example to send serial data to the MP3 Player. Since using DJ Sure's trigger widget is out of the question with this board, I started wondering if I could achieve a similar outcome by programming the EZ-Board with C# code. If so, then I could buy this board in Brazil and get away with it.
The issue I see is that the C code has some dependencies (libraries) that I am not sure how to import as C# assemblies in the EZ-code editor. Hope maybe DJ Sures (or some other technically enlightened member) can shed some light upon me.
Now I will be happy if I just can make my robot talk. :(
I'm sorry to hear you are having difficulty. From what I understand, you ordered from sparkfun without tracking. The first one was lost and they offered to send another for free also without tracking. If I may quote you "I'll take my chances with USPS thank you very much". I would have done the same because of the cost but you willingly will take a chance. It seems that once mail leaves the US and arrives in the Brazil post system it gets intercepted. My guess is that they see it has no tracking and claim it for themselves. Im sorry that things are getting lost but sometimes it happens with untracked items. Btw I too order internationally (China via Ebay) and items occasionally dont arrive and they offer to resend. I've ordered a Kindle Fire from Amazon the first one never arrived. They resent it but Im sure they would have sent a third though.
If it's a serial controlled board you are able to use EZ-Script to send the required commands, you can also map these to joystick buttons or key presses.
SendSerial() is the EZ-Script command and is pretty simple to use. With the documentation for the board I'm confident we can figure it out.
The board would need to connect to a signal pin of one of the digital ports, for instance D0. Then the EZ-Script command to play track 1 would be something like
I haven't had chance to read the document you linked to but hopefully the above gives you an idea of how simple it is.
Interesting point @Troy, let me ask, where do you live? And how much would FedEx delivery cost to you? Try figuring these answers to yourself, and then ask yourself the question, would you still consider it fair for someone to pay almost 4 times over the cost of the goods just for having something delivered.
China does it easily. I get tracking. I get the goods. Not asking for more than that.
The thing is, as you pointed out, China wholesalers (I also buy from ebay, recently having successfuly purchased AND received an JXD S7300) DO send items WITH tracking. American dealers "say" they sent, they "say" it should be on its way. Should I just trust their word, then.
USPS seems to be the poorest, lousiest, most incompetent posting service in the world. This is the impression I get.
@Rich: that example would be suitable for sending a command to the MP3 Trigger board. For the other board, it is done somewhat differently. As I mentioned, the commands are submitted from the macros embedded in the library files (.h files) included in the C source code. Thus, there are custom function calls placed throughout the example C code that take a single parameter of type byte to specify which file to play. Like this:
The files stored in the TF card are to follow a certain naming convention, in order for these macros to address the stored .mp3 files according to the argument passed to them. As in: 'track00x.mp3' ('x' = track number).
I haven't yet found anything that documents how the MP3 Player board takes serial commands as well as the PDF for the MP3 Trigger. I haven't gone through the C# programming documentation for the EZ-board. Just as you, I got as far as figuring out that the RX connection gets a signal from the digital pulse output coming from the EZ board (just like it's done with the MP3 Trigger implementation), but the software part is what gets me confused.
I live in Qatar on a US base. Post goes to the USPS first before it's forwarded here and goes through Qatari customs. The tracking numbers I get from my China orders never seem to be real though. USPS as with any government run agency never improve over time. USPS only got better when FEDEX and UPS offered better service and and cheaper. Here is one example of the mess. Also Google USPS waste. I'm not really saying your wrong but things will get lost when going international. Well....in my own experience anyway.
It still amazes me how a country living under a comunist dictatorship is capable of considerably better postal service than a country that invests billions in warfare and international espionage. But hey, let me stop talking politics or I will soon need sedative. And this is not the place anyway.
I never found a Chinese tracking number to be bogus, hence me putting so much faith in them. But that's just me. Thinking about it, I only had negative experiences buying from the US. What can I say.