
Change Release Notes
This release contains a rewrite of the EZ-Script compiler for more features, functions, scientific math and compliance. The old compiler allowed you to embed variables within a quoted string ( i.e. "Text: $variable" ). However, that wasn't a compliant syntax to be similar with other programming languages. The new compiler requires the strings to be concatenated (i.e. "Text: " + $variable). This will aid in education and readability.
There is also a slight speed increase in the compiler. And many new functions for Math and Logic.
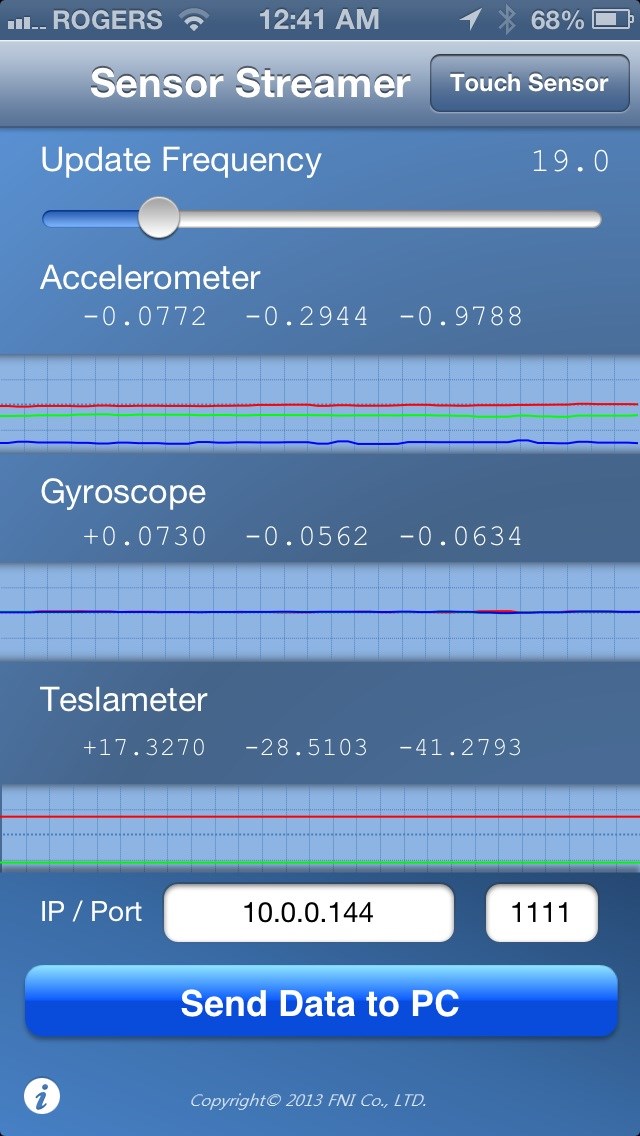
A really neat add-in is a new control for the Apple Mobile Device App called FNI Co. Sensor Streamer. There is both a free and paid version available. The control can be found under the Misc category of Add Control. The control will set variables to the values of parameters from the application. This includes sensors such as Compass (teslameter), Accelerometer, Gyroscope, GPS (longitude, latitude), and touchscreen. It's a really great app! Download App: https://itunes.apple.com/app/sensor-data-streamer/id608278214?mt=8
New EZ-Script compiler
New Control: Sensor Streamer Server
New memory Variable Manager
File->Open dialog remembers last open location To Use
- Load ARC
- Select Projects tab from top menu
- Press Add Control
- Select MISC tab
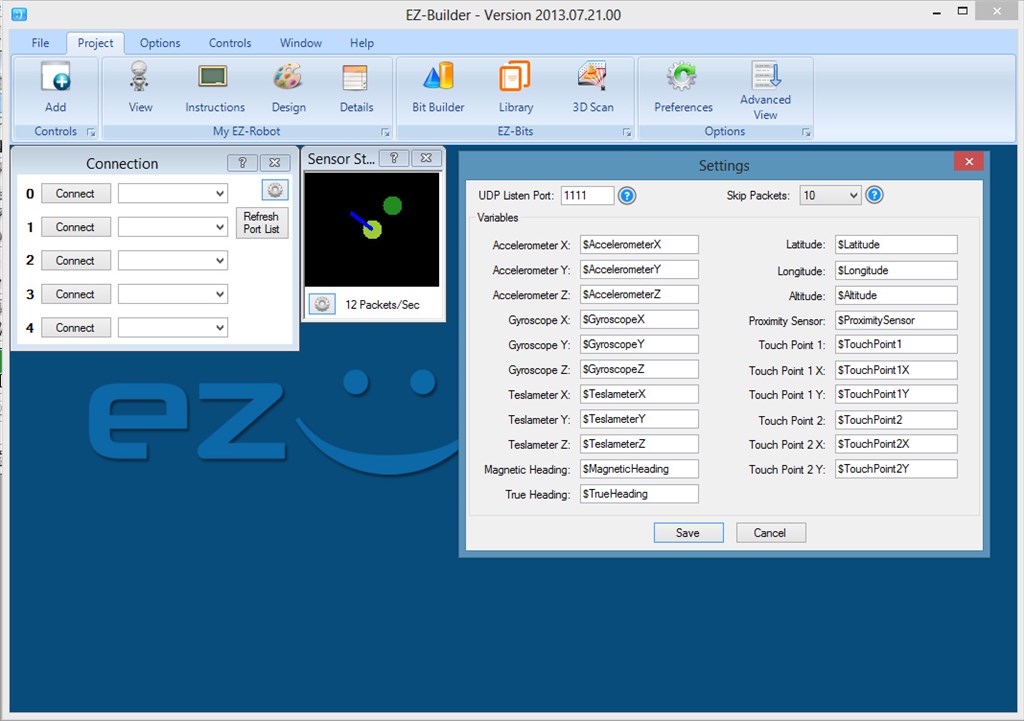
- Add the control "Sensor Streamer Server"
The control will default to port 1111. Configure your Mobile Device to connect to your computer's IP Address. The control will display the Accelerometer, Gyroscope and Compass Direction. The Config menu will allow you to assign sensor values to EZ-Script variables. The Sensor Stream Server will also control servos. This can be configured under the Config menu of the control.
ARC Downloads
ARC
FREE- 1 third-party plugin skill per project
- Trial cloud services
- Personal, DIY & education use
- Updated every 6–12 months
ARC
PRO- Use on 2+ PCs simultaneously
- Unlimited robot skills
- Cloud backup & revision history
- Weekly features & bug fixes
- Business use permitted
ARC
RUNTIME- Load & run any ARC project
- Read-only mode
- Unlimited robot skills
- Includes early access fixes & features
- Minimum requirements: Windows 10 or higher, 2 GB RAM, 500 MB free disk space.
- Recommended: Windows 10 or higher, 8 GB RAM, 1 GB free disk space.
- Prices are in USD.
- More about each edition: Download & install guide.
- Latest changes: Release notes.
Compare Editions
| Feature |
ARC
FREE
|
ARC
PRO
|
|---|---|---|
| Get ARC Free | View Plans | |
| Usage | Personal · DIY · Education | Personal · DIY · Education · Business |
| Early access to new features & fixes | — | ✓ |
| Simultaneous microcontroller connections * | 1 | 255 |
| Robot skills * | 20 | Unlimited |
| Skill Store plugins * | 1 | Unlimited |
| Cognitive services usage ** | 10 / day | 6,000 / day |
| Auto-positions gait actions * | 40 | Unlimited |
| Speech recognition phrases * | 10 | Unlimited |
| Camera devices * | 1 | Unlimited |
| Vision resolution | max 320×240 | Unlimited |
| Interface builder * | 2 | Unlimited |
| Cloud project size | — | 128 MB |
| Cloud project revision history | — | ✓ |
| Create Exosphere requests | — | 50 / month |
| Exosphere API access | — | Contact Us |
| Volume license discounts | — | Contact Us |
| Get ARC Free | View Plans |
* Per robot project
** 1,000 per cognitive type: vision recognition, speech recognition, face detection, sentiment, text recognition, emotion detection, azure text to speech

Upgrade to ARC Pro
ARC Pro is more than a tool; it's a creative playground for robot enthusiasts, where you can turn your wildest ideas into reality.
Now this i Like

 Thank You
Thank You
Fantastic thanks
DJ and Co.
It's working PERFECTLY!
However the app you configured EZ-Script around is actually named "Sensor Data Streamer" By FNI Co., LTD and costs .99.
To get my correct ip address for the app, I clicked:
Windows Start>typed cmd enter>ipconfig enter That displays IPv4 address which usually starts with 192.168.1.2 The last two numbers will vary.
Also with a poor wifi connection, if I turn the sample rate up too high it starts to behave erratically. But I don't think that more than 10-20 Hz would be necessary.
I'm glad I didn't buy a gyro and GPS...
Thanks for all you do!
Cool, although now I need to fix a bunch of scripts but never mind
One quick question (I have not updated yet as I am at work). With the new syntax of "text" + $variable, some of my scripts display $variable1 $variable2 $variable3. If they are decimal would
add the 2 variables together like it does with
Hopefully that makes sense. I'll be trying it as soon as I can but wanted to know before I sit down and fix the scripts.
What you want to do is (like all languages) is add a blank space...
Outputs: 5 3
Or if you want them beside each other as a string...
Outputs: 53
Thanks Although I don't know what I was thinking (it's early, I've not had my coffee yet) but none of my scripts are like I said anyway but that's good info to have. I guess I should be using the ToString() command more often too
Although I don't know what I was thinking (it's early, I've not had my coffee yet) but none of my scripts are like I said anyway but that's good info to have. I guess I should be using the ToString() command more often too
A pre-emptive strike as I know a few of my scripts wont work now, I will fix them as soon as I can. It should be limited to only a handful.
And thanks for the update!
Likewise received with thanks DJ and team...
The improved syntax will aid in teaching... appreciated.
@tameion
There are several similar sensor streaming apps for Android. I will try some out (at least ones that do UDP streaming). I suspect the new feature would work with any of them.
Alan