Change Release Notes
This release contains a rewrite of the EZ-Script compiler for more features, functions, scientific math and compliance. The old compiler allowed you to embed variables within a quoted string ( i.e. "Text: $variable" ). However, that wasn't a compliant syntax to be similar with other programming languages. The new compiler requires the strings to be concatenated (i.e. "Text: " + $variable). This will aid in education and readability.
There is also a slight speed increase in the compiler. And many new functions for Math and Logic.
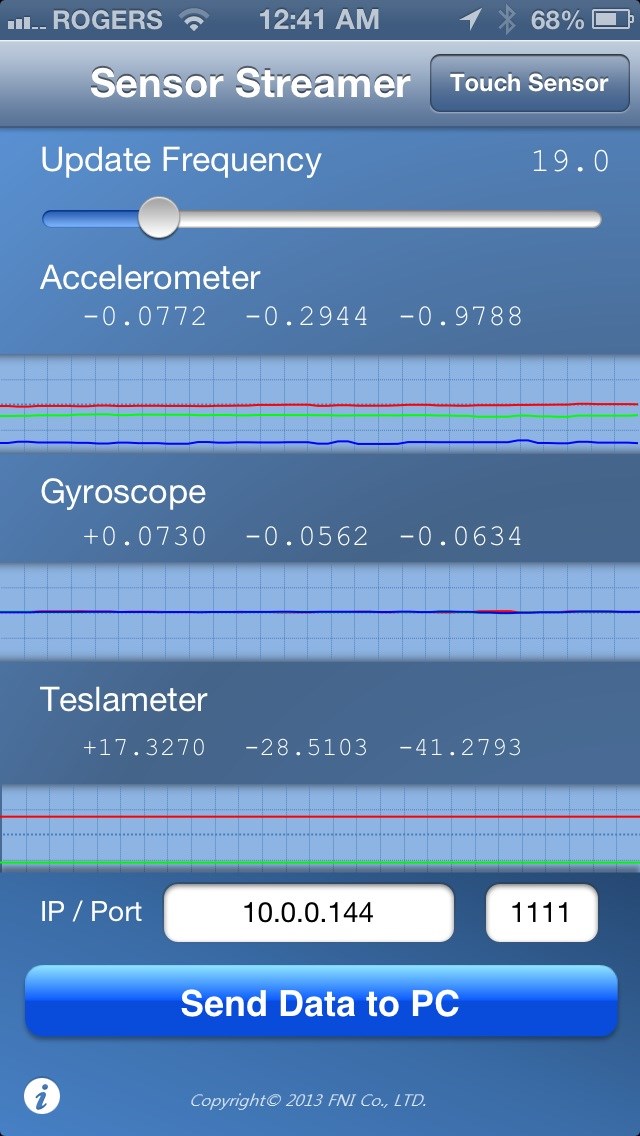
A really neat add-in is a new control for the Apple Mobile Device App called FNI Co. Sensor Streamer. There is both a free and paid version available. The control can be found under the Misc category of Add Control. The control will set variables to the values of parameters from the application. This includes sensors such as Compass (teslameter), Accelerometer, Gyroscope, GPS (longitude, latitude), and touchscreen. It's a really great app! Download App: https://itunes.apple.com/app/sensor-data-streamer/id608278214?mt=8
New EZ-Script compiler
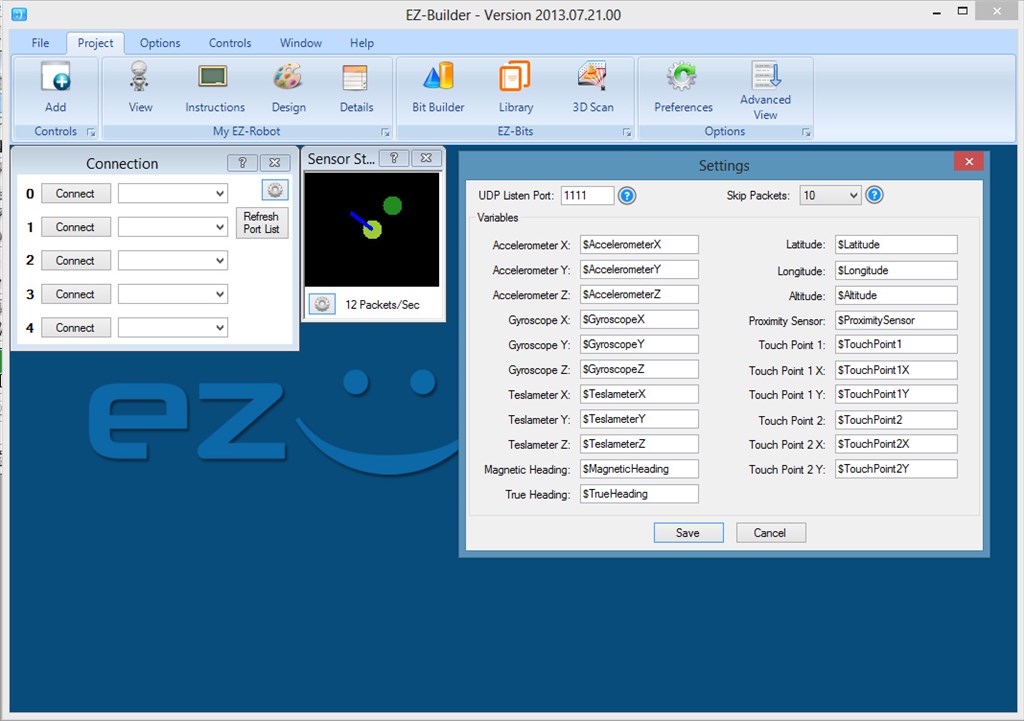
New Control: Sensor Streamer Server
New memory Variable Manager
File->Open dialog remembers last open location To Use
- Load ARC
- Select Projects tab from top menu
- Press Add Control
- Select MISC tab
- Add the control "Sensor Streamer Server"
The control will default to port 1111. Configure your Mobile Device to connect to your computer's IP Address. The control will display the Accelerometer, Gyroscope and Compass Direction. The Config menu will allow you to assign sensor values to EZ-Script variables. The Sensor Stream Server will also control servos. This can be configured under the Config menu of the control.
ARC Downloads
ARC
FREE- 1 third-party plugin skill per project
- Trial cloud services
- Personal, DIY & education use
- Updated every 6–12 months
ARC
PRO- Use on 2+ PCs simultaneously
- Unlimited robot skills
- Cloud backup & revision history
- Weekly features & bug fixes
- Business use permitted
ARC
RUNTIME- Load & run any ARC project
- Read-only mode
- Unlimited robot skills
- Includes early access fixes & features
- Minimum requirements: Windows 10 or higher, 2 GB RAM, 500 MB free disk space.
- Recommended: Windows 10 or higher, 8 GB RAM, 1 GB free disk space.
- Prices are in USD.
- More about each edition: Download & install guide.
- Latest changes: Release notes.
Compare Editions
| Feature |
ARC
FREE
|
ARC
PRO
|
|---|---|---|
| Get ARC Free | View Plans | |
| Usage | Personal · DIY · Education | Personal · DIY · Education · Business |
| Early access to new features & fixes | — | ✓ |
| Simultaneous microcontroller connections * | 1 | 255 |
| Robot skills * | 20 | Unlimited |
| Skill Store plugins * | 1 | Unlimited |
| Cognitive services usage ** | 10 / day | 6,000 / day |
| Auto-positions gait actions * | 40 | Unlimited |
| Speech recognition phrases * | 10 | Unlimited |
| Camera devices * | 1 | Unlimited |
| Vision resolution | max 320×240 | Unlimited |
| Interface builder * | 2 | Unlimited |
| Cloud project size | — | 128 MB |
| Cloud project revision history | — | ✓ |
| Create Exosphere requests | — | 50 / month |
| Exosphere API access | — | Contact Us |
| Volume license discounts | — | Contact Us |
| Get ARC Free | View Plans |
* Per robot project
** 1,000 per cognitive type: vision recognition, speech recognition, face detection, sentiment, text recognition, emotion detection, azure text to speech

Upgrade to ARC Pro
With ARC Pro, your robot is not just a machine; it's your creative partner in the journey of technological exploration.
Thanks @Andre99, have you thought about using the Script Manager or EZ-Script control? You can toggle the digital ports using the toggle EZ-Script command. Or just use the SET command to turn them on or off programatically
Hello DJ, for this base I want to be able to control it's position with the keyboard or the mouse because my mower robot will use this type of controls to record the perimeter of my courtward.
I just think I can use a joystick unstead with script, it will be much better, I will be able to have speed control at the same time as direction (for the mower, the other is only on or off). So, will have to wait until tomorrow to purchase a joystick The joystick panel is very good, the Variables will be perfect.
The joystick panel is very good, the Variables will be perfect.
The toggle function is to toggle the state of the output of one digital port ? I made a search and was not able to fin any example in the forum, only in ARC and I can't test it now, my wife is sleeping.
Thank you DJ for the good suggestions, I am very happy with my EZ kit and it alway's surprise me with the possibility you have made in it.
Andre
Awesome Andre99 Also, look in the Keyboard Control. You can map EZ-Script to keys. It is found under the Scripting tab
Also, look in the Keyboard Control. You can map EZ-Script to keys. It is found under the Scripting tab
DJ, you are surprising ! This will do the job perfectly, you had just made my day. Look like I will have a lot of fun tomorrow morning.
Just to show you the little thing I test, it's not good looking for now:
Thank's again DJ
The example below does not appear to be working in the script control of ARC.
The first time I run the script control it gives me 0's regardless of the color of the BlinkM. The second time I ran it, it disconnects the EZ-Robot controller in the connection widget.
From the ARC BlinkM control I was able to read and set values just fine. My BlinkM fades through many colors as a default program. I was able to pick up different values at different times.
Is it a flaw with the example code?
from : https://synthiam.com/Community/Questions/3918
Probably something in the code needs changing, I'll have a look when I get the chance.
Have you tried substituting the $i2caddress variable for the actual address, in this case 0x09?
Tried putting in the address instead of the variable... still get 0's on the first run and disconnect on the second.
Return in the status window when it disconnects.
Have you checked the wiring of the BlinkM? Some of my I2C devices would cause disconnects when I had bad wires.
I'll try and test it on mine later if I can.