
Change Release Notes
There has been a lot of talk recently about adding conversational A.I. to your robot. Many years ago, I created a learning A.I. called Synthia. I appreciate the interest in Synthia, however she'd require a bit of work to go public. So, a few of you have mentioned PandoraBots - which is an online bot hosting service.
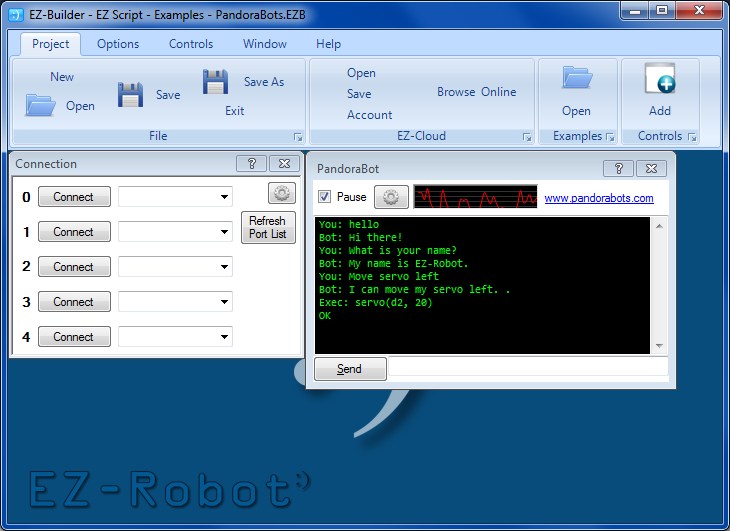
This release introduces a PandoraBot Control, found under the Speech category when adding controls. Please use the ? to read details on how this control works, and the issues with speech recognition. There is also an Example Project you may load to review functionality.
If you create your own Bot, you may also add speech commands that are specific to your robot. If you review the example that I had included, you will notice that "Move servo Left" will execute EZ-Script. Any response that includes EZ-Script can be surrounded by [ and ]. The help page will explain more
- New Control: PandoraBot Artificial Intelligence
ARC Downloads
ARC
FREE- 1 third-party plugin skill per project
- Trial cloud services
- Personal, DIY & education use
- Updated every 6–12 months
ARC
PRO- Use on 2+ PCs simultaneously
- Unlimited robot skills
- Cloud backup & revision history
- Weekly features & bug fixes
- Business use permitted
ARC
RUNTIME- Load & run any ARC project
- Read-only mode
- Unlimited robot skills
- Includes early access fixes & features
- Minimum requirements: Windows 10 or higher, 2 GB RAM, 500 MB free disk space.
- Recommended: Windows 10 or higher, 8 GB RAM, 1 GB free disk space.
- Prices are in USD.
- More about each edition: Download & install guide.
- Latest changes: Release notes.
Compare Editions
| Feature |
ARC
FREE
|
ARC
PRO
|
|---|---|---|
| Get ARC Free | View Plans | |
| Usage | Personal · DIY · Education | Personal · DIY · Education · Business |
| Early access to new features & fixes | — | ✓ |
| Simultaneous microcontroller connections * | 1 | 255 |
| Robot skills * | 20 | Unlimited |
| Skill Store plugins * | 1 | Unlimited |
| Cognitive services usage ** | 10 / day | 6,000 / day |
| Auto-positions gait actions * | 40 | Unlimited |
| Speech recognition phrases * | 10 | Unlimited |
| Camera devices * | 1 | Unlimited |
| Vision resolution | max 320×240 | Unlimited |
| Interface builder * | 2 | Unlimited |
| Cloud project size | — | 128 MB |
| Cloud project revision history | — | ✓ |
| Create Exosphere requests | — | 50 / month |
| Exosphere API access | — | Contact Us |
| Volume license discounts | — | Contact Us |
| Get ARC Free | View Plans |
* Per robot project
** 1,000 per cognitive type: vision recognition, speech recognition, face detection, sentiment, text recognition, emotion detection, azure text to speech

Upgrade to ARC Pro
Harnessing the power of ARC Pro, your robot can be more than just a simple automated machine.
Excellent work, I'll certainly be trying that out as soon as I download and install the update.
You may have changed my mind about my Hearoid not talking with this update, it's just too good a feature not to use!
Edit: Couple of notes, which may be specific to my system. The configuration screen is full screen with only the pandorabots id and username, it just seems a little large for what's in it. Clicking on the pandorabots link on the control brought up an error "System.ArgumentException: Help URL 'www.pandorabots.com' is not valid."
It may be my system, it seems to be running a bit slow tonight but thought I would bring them to your attention anyway just in case
Other than that... awesome!
@rich naww it does same too me that error yea it will be cool for my genie. robot
yea it will be cool for my genie. robot
dj just fix this morning lol i had update again it links to web site now
This is an awesome update cant get EZ-B to talk to my Pandorabot though does the ez-b panel need a password as well?
@winstn60 Have you "published" your bot?
Ahh I'll try that when I'm @ home after work
Thanks
Thank You, D.J.
It is nice to have a chat engine.
Here are my results so far:
sound is recognized perfectly by the speech recognition engine. But, the chatbot doesn't understand mostly what I say. I guess I have to play with the settings or something. But, the speech engine knows what I am saying. The same sentence is seen as something totally different in the pandorabot box.
weird. But, it is a start.
OK, I understand. I have to train my voice.