
EZB Server (Blueberry Server) Firmware
Turn a Raspberry Pi into an EZ-B V4 server for EZ-Builder: open-source Python, camera support, EZ-Builder connection, hardware precautions.
Compatible Hardware

Description
This server program turns a Raspberry Pi into an EZ-B V4.
VERY IMPORTANT:
Although Raspberry PI is a fantastic small computer can't replace low level micro-controllers, is not a Real Time device.
For specific low level operations e.g. PWM, I2C, SPI, Analog ports you will need additional add-ons i.e. Bonnets, HATS or serial devices.
Connecting cables or devices should be done offline
Raspberry PI is not an Arduino or an EZB-controller, does not have mechanisms to handle small short-circuits i.e. resistors between the headers and the micro controller ports.
Is a 3.3v logic device, in general, applying 5 V to an input that is not tolerant to 5 V may damage the microcontroller circuitry.
Yes and is very sensitive too touch: The Raspberry Pi board has exposed circuitry and electronic components which are subject to irreparable damage or destruction by static electricity. You don't have to see, hear or feel a static discharge. Damage can be done without knowing it.

Regarding the software: Copyright (c) 2019 Pedro Pereira Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software. THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
The server is open source code and is written in Python although I have a love-and-hate relationship with Python language, two annoying things: it's not statically-typed language (not good for people with Dyslexia or fat fingers:)) and uses indentation to start or end blocks (so yes a single space can break your code) nevertheless it's easy available.
Required components:
sudo apt-get install python3 python3-pyaudio
Clone the source code repository on your raspberry pi home folder:
cd ~/
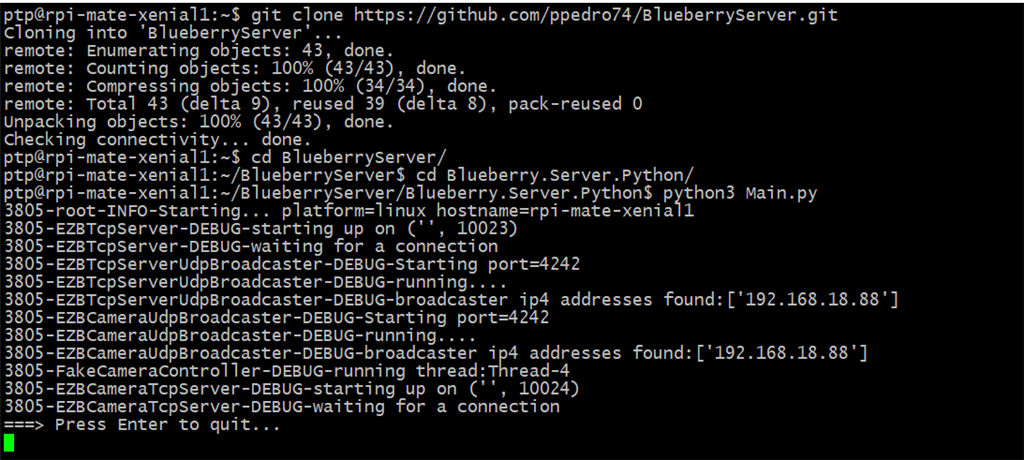
git clone https://github.com/ppedro74/BlueberryServer.git
Start the server:
cd ~/BlueberryServer/Blueberry.Server.Python/
python3 Main.py
If everything is OK this is an expected output:
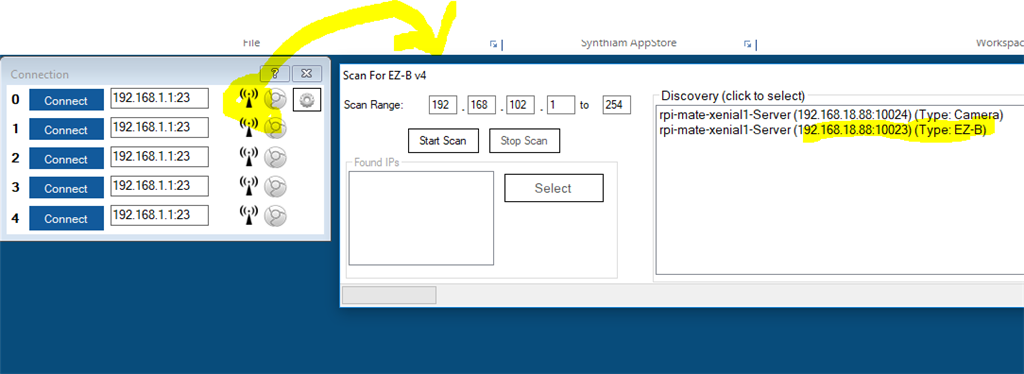
Start EZ-Builder:
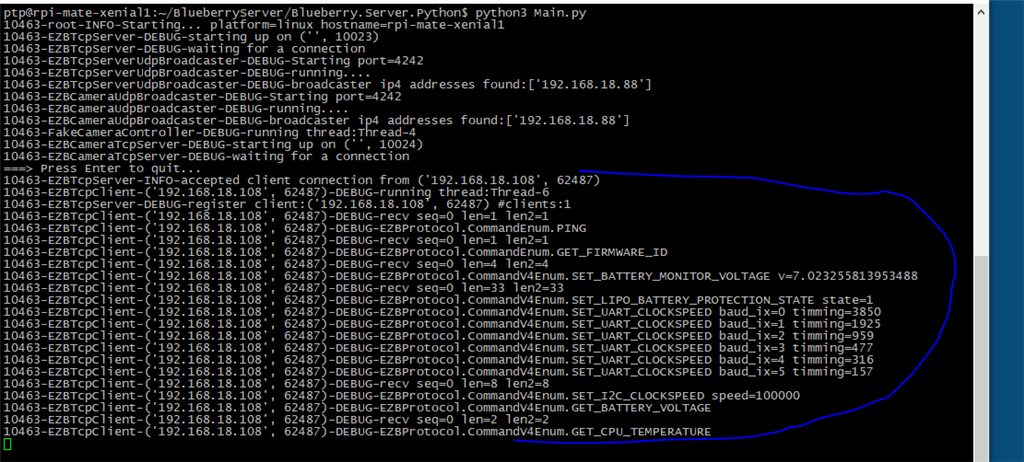
This is an expected debug output:
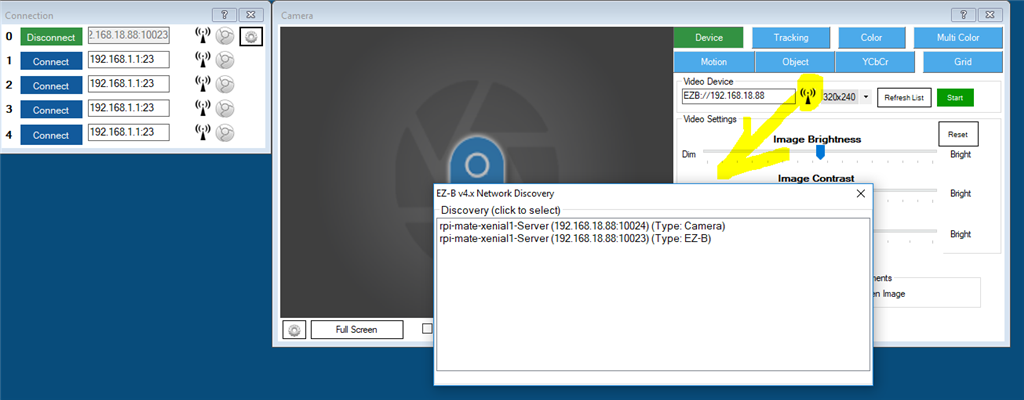
Add a camera control (Don't worry if you don't have one):
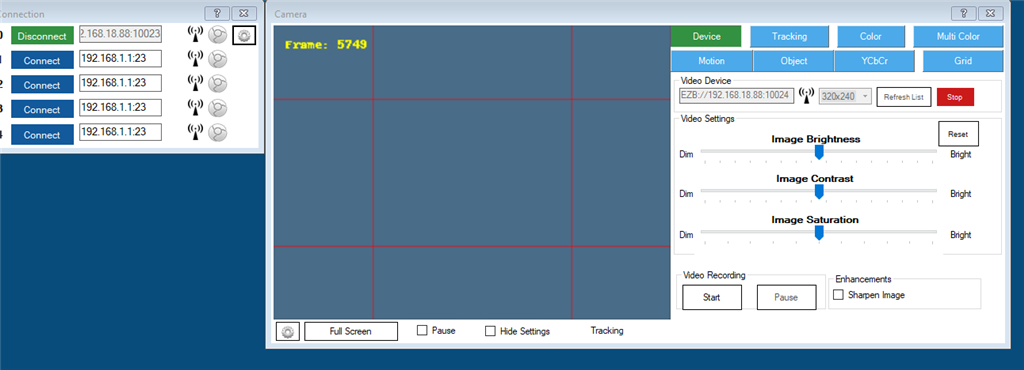

@ptp, I have made some tests. I succeeded in launching the server and connecting ARC and the PiCam. The good news is the camera works very well, with all the fun stuff (color tracking...), with no latency. I have also succeeded in adding D0 & D1 servos, even if I don't know what to do with it .
I still cannot use a Digital control to switch a LED, but i don't know if it has been implemented yet...
.
I still cannot use a Digital control to switch a LED, but i don't know if it has been implemented yet...
I will test it furthermore tomorrow (it is late now in France)
@fredebec:
I've Buster, updated. Please run the updates & upgrades.
EZ-Builder:
RPI3 Setup 1:
RPI4b Setup (With additional hardware: Google Voice Hat):
Both setups use the same D4,D5,D6 ports.
Wiring: Yellow = 3v3, Red = Gpio4 Green = Gpio5 Blue = Gpio6
Bear in mind RPI does not have resistors between the SOC ports and the headers like EZB. The RGB breakout https://www.robotshop.com/en/rgb-led-breakout.html has 3 resistors and can be connected to 5v or 3v3.
@ptp: The digital ports works ! I have successfully switch on my LED on my pi through ARC for the first time.
For the servos, now that the fake ones work (:D), I will try the generic PCA9685 board I have. I will play a little with it today....
Finally, I have an error when I enable audio support (the speaker-test was OK):
Thanks a lot for this great BlueBerry
If you have changes the above pull request may fail, Please copy or memorize the changes done e.g. activating the audio, and when you are ready run:
the above commands will revert any local changes, then run (again):
After this pull the audio is disabled (commented) so you will need to enable the audio.
Let me know if it works for you too.
@ptp, it's OK now, no more error when I start the server. However, I cannot use the the speech synthesis control. ARC tells me that "This control is not supported on this operating system". I think it is because I use ARC on the pi with mono, right ? I will try with ARC on my win10 PC (not available right now...)
Just installed your BlueBerryServer, it runs like a charm!!! Very fast camera stream, an no connection issues on my Rasberry Pi 3!!
But on my Raspberry Pi Zero the Camera is not being recognized... 1218-root-ERROR-Error loading PiCameraController ex=Failed to enable connection: Out of resources
I should mention, that it is the AIY Vision kit, so the camera is being routed thru the VisonBonnet!
P.S. I had to install psutil to get the whole thing working... sudo pip3 install psutil
Could there be a possibility of swapping cams? Let's say you have a USB and a normal Cam for the RPI and you want to switch.