Tutorial
Published
— Updated
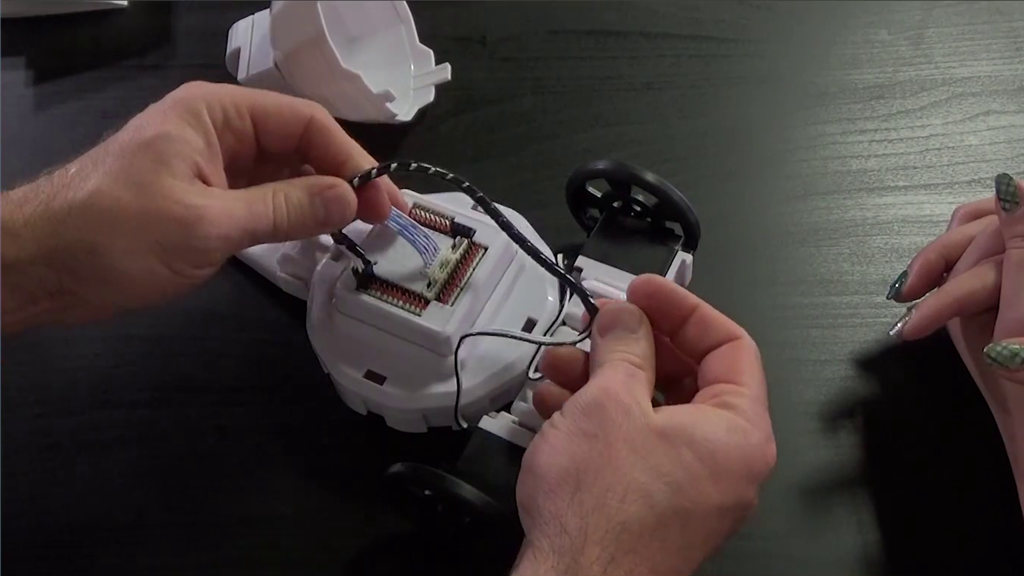
Step 24 of 27
Step 23
Leave cable slack near servos for full range of motion.
 Pandorabot AIML2
— Connect ARC to Pandorabots AIML2 to run AI-driven virtual personalities for human-like text or voice chat, using API keys and script hooks.
Try it →
Pandorabot AIML2
— Connect ARC to Pandorabots AIML2 to run AI-driven virtual personalities for human-like text or voice chat, using API keys and script hooks.
Try it →
