Tutorial
Published
— Updated
Step 16 of 27
Step 15
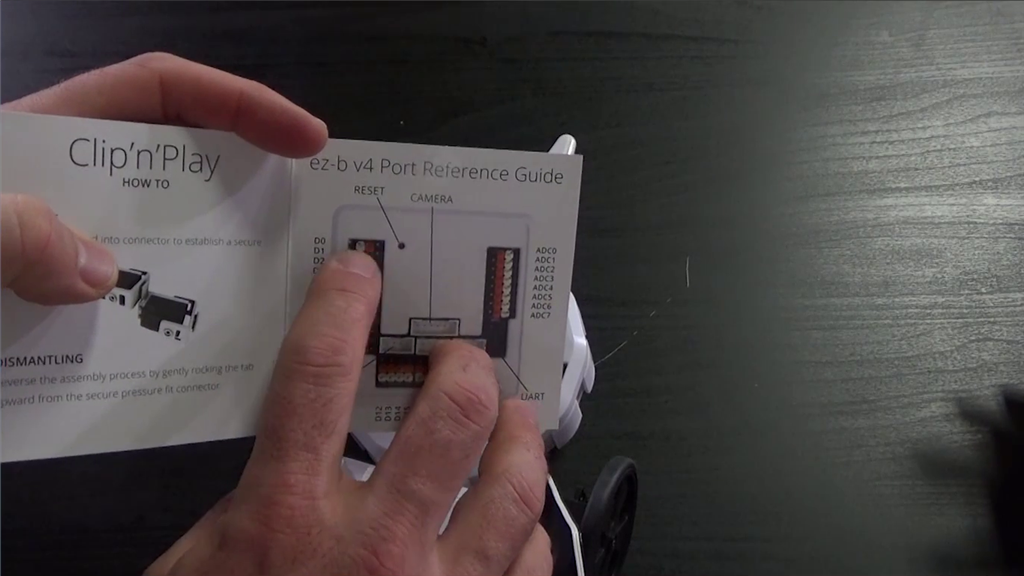
Connect the servo to D0.
 Talk Servo V2
— Animate servos to simulate jaw/mouth with ARC text-to-speech; configurable vowel/consonant timing, start sync, multi-servo control, pause/stop.
Try it →
Talk Servo V2
— Animate servos to simulate jaw/mouth with ARC text-to-speech; configurable vowel/consonant timing, start sync, multi-servo control, pause/stop.
Try it →
Connect the servo to D0.
