




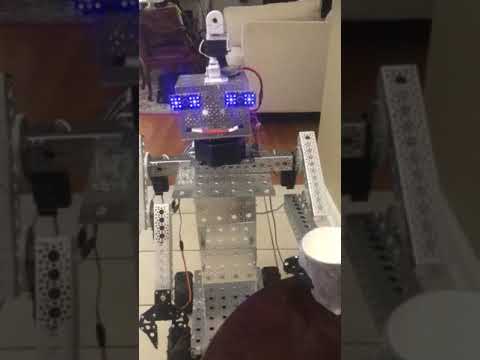











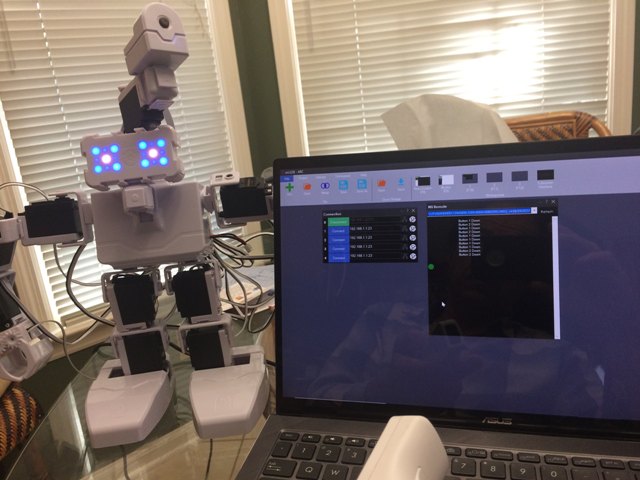



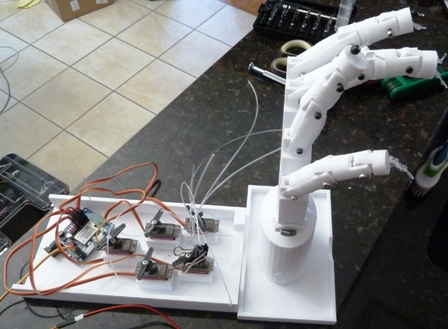


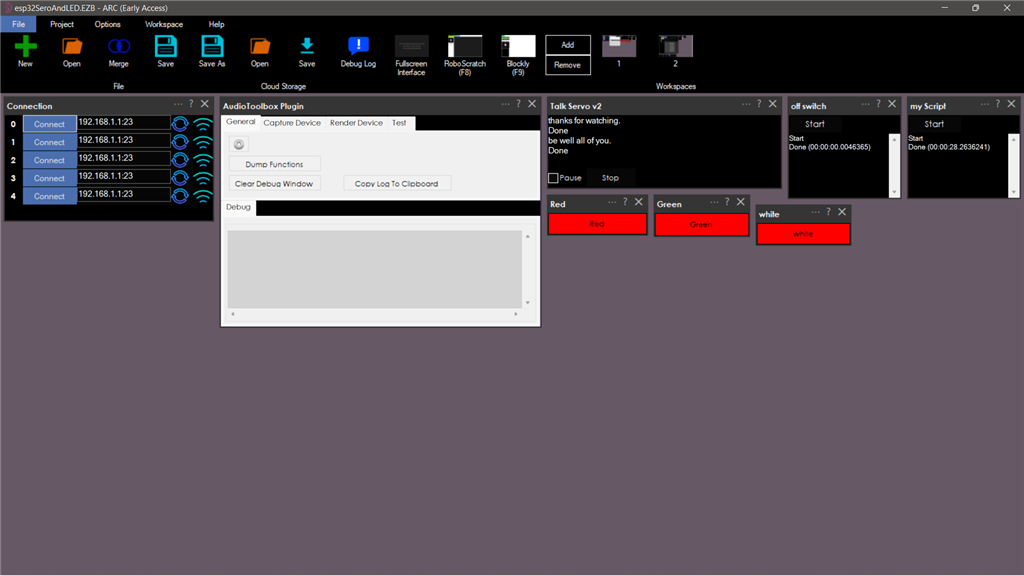

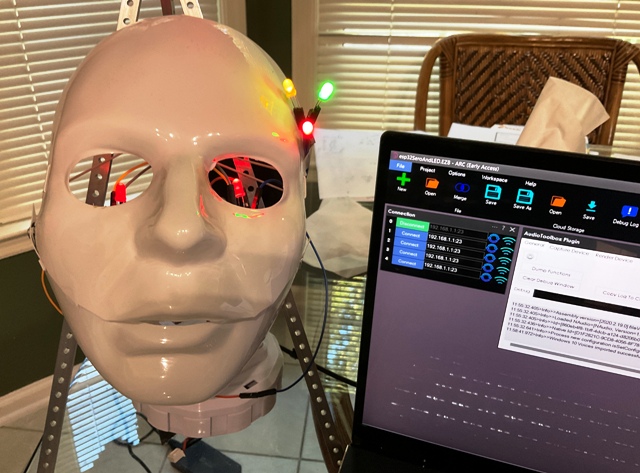
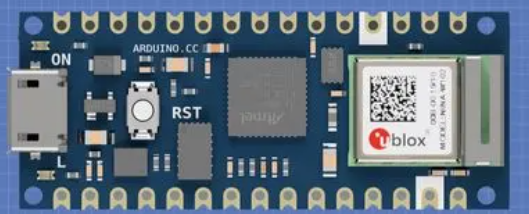
I am using ARC software with 2 iotinys controller, 2 EzB4 controllers - 3 EZ-ROBOT 1300 lithium batteries for the four Ez 360 HDD servos for the two arms, two 996R servos for the grippers, 2 DFRobot rotation hex bases for head movement and body movements. with 2 EZ-robot servos HDD, 2 RGB for the eyes - EZ-Robot HDD servo and moving camera - still need a mouth
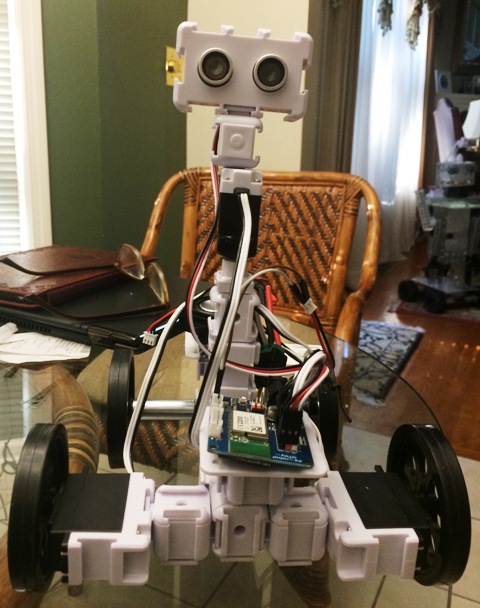
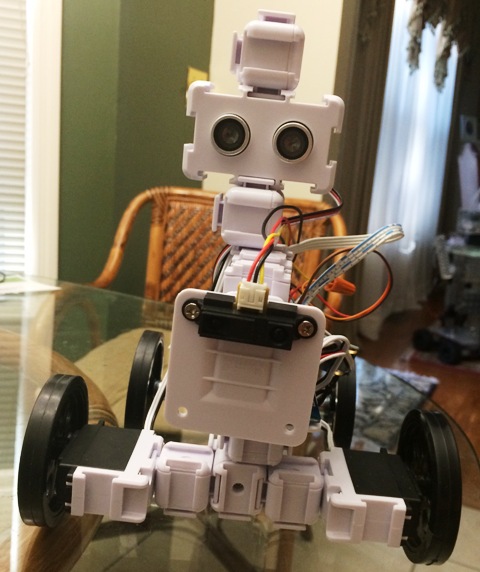
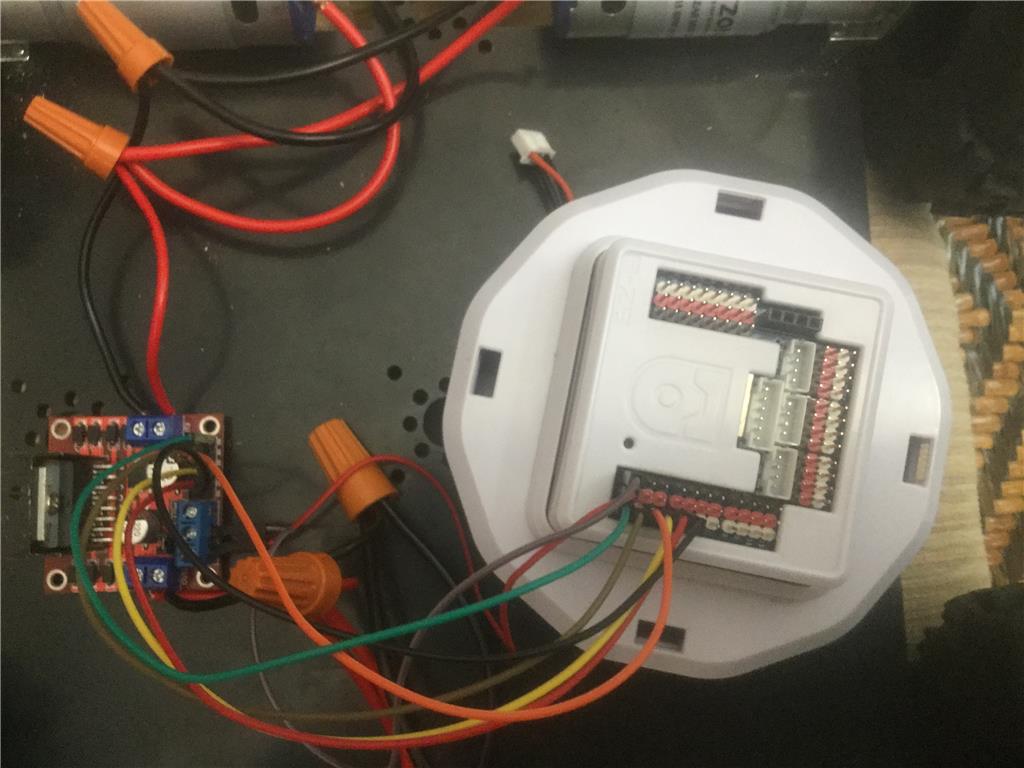
from servo City: 4 gearboxes , channels, parts, extensions, Prowler Robot Kit (wheels, 4 motors, h-bridge pwm motor controller
Here is a sample video
EzAng
By EzAng
— Last update
Other robots from Synthiam community

DJ's At Home With Jd
Tweak JD's EZ-Robot motions for smoother, less clunky movement-fun first-time session that shows why EZ-Robot is so...

Jstarne1's 2013 Robo Ducki , Gift To Dj & The Ez Robot...
Custom EZ Robot Ducki scaled for microservos, 3Dprinted robo-duck celebrating EZBuilder, EZBits and EZB v3/v4 with...

Steve's Grace’S First Robot
Boxbot dance demo built with 9-year-old Grace, a family robotics project fostering her interest in building robots

Oh nice. I like how the prowler kit was installed. Love the servocity hardware, just makes for an awesome machine.
Thanks RoboHappy,
Yes, servo city has the items to build any robot, the Actobotics parts are awesome.
Actobotics Attachment Ideas
https://www.servocity.com/actobotics-attachment-ideas
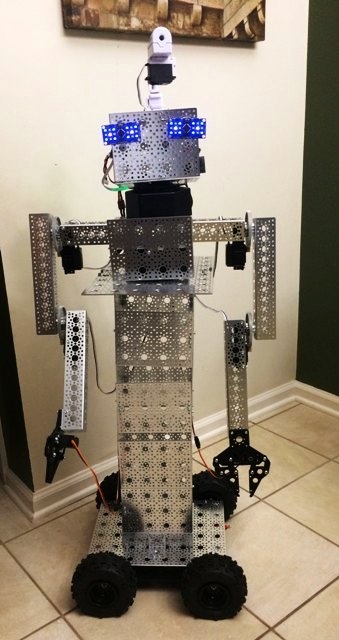
I would like some moving mouth or perhaps lights that flash when a sound occurs, any Ideas?
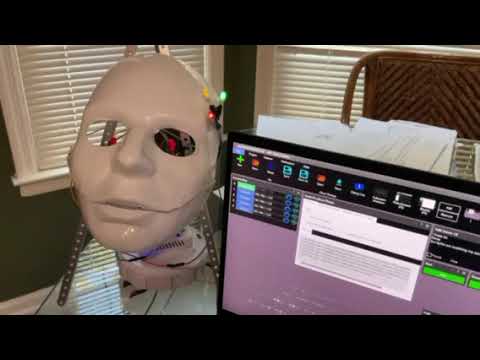
I quit showing robots that looks sort of like a human face, I found out many people do not like that and think it is creepy.
I will make a video today I hope...
EzAng
I do like the flashing lights with audio idea too. The moving mouth is still a good idea to still(with that special servo control right?) Im sorta looking at doing something like it with Hemi maybe.
I like the moving mouth as it gives more interest and is not that difficult. I asked about having the lights flash with the voice and Will is using a voice circuit like scary terry. and so is Dave on his B9 Robot. I already have a scarry terry board but it is just so much more wires just to make the lights flash. the mouth does not have to open this one is just 4 micro servos and some surgical tubing. you just use a Disney mouth position chart to make the lips move correctly
I don’t mean to hi-jack EzAng thread.
@nallycat, is that the ERNE4.1 robot head?
Nallycat, when I get time, I will try the micro servos and some tubing, looks promising, I know how to run the ARC talk servo control pretty well as I did on my Roman Head robot. Good thought!, thanks
EzAng
@merne Yes that is ERNE4.1 robot head. EzAng can use the mouth idea. I forget to say there is an app for erne4.1 robot head in Synthiam, I have not tried theis app so I am not sure it works but EzAng may want to try it. The files to print are on thingiverse.
Yes, I am trying it now, the the micro servos and some tubing, works good
EzAng