








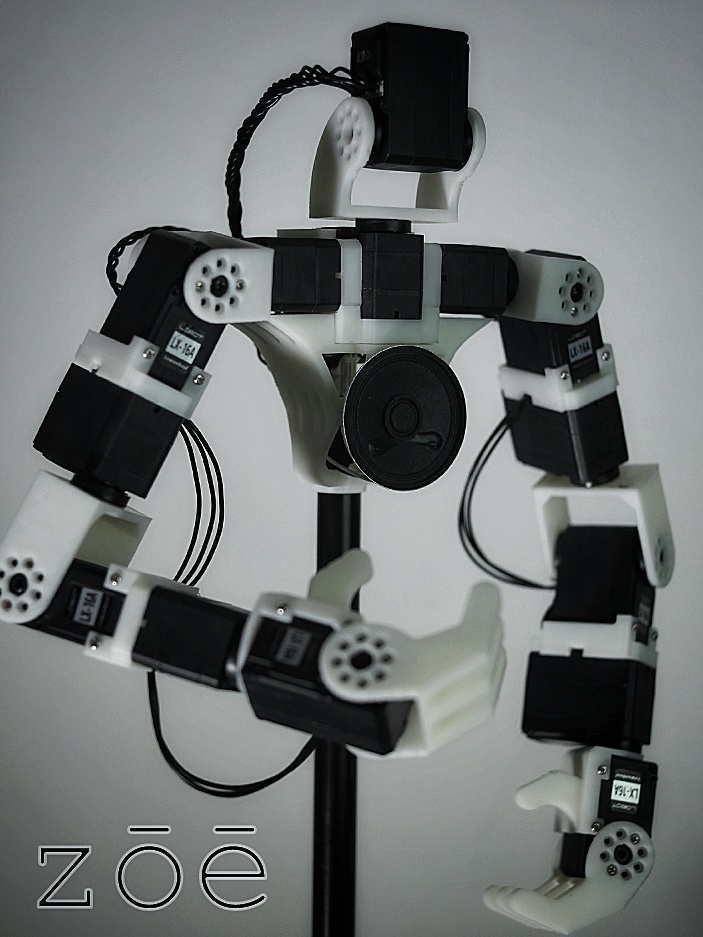


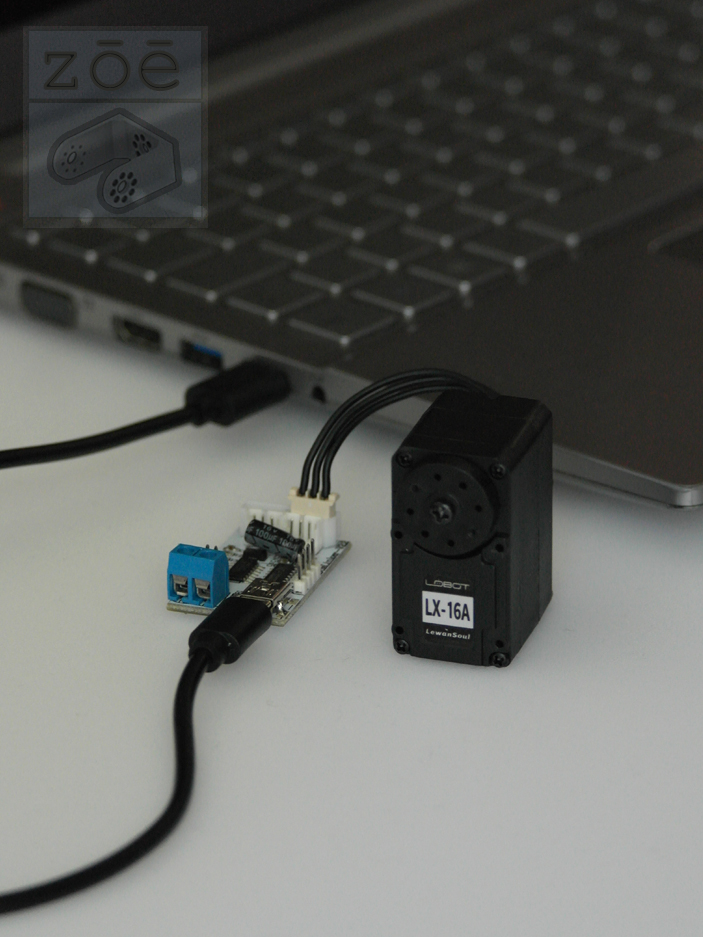



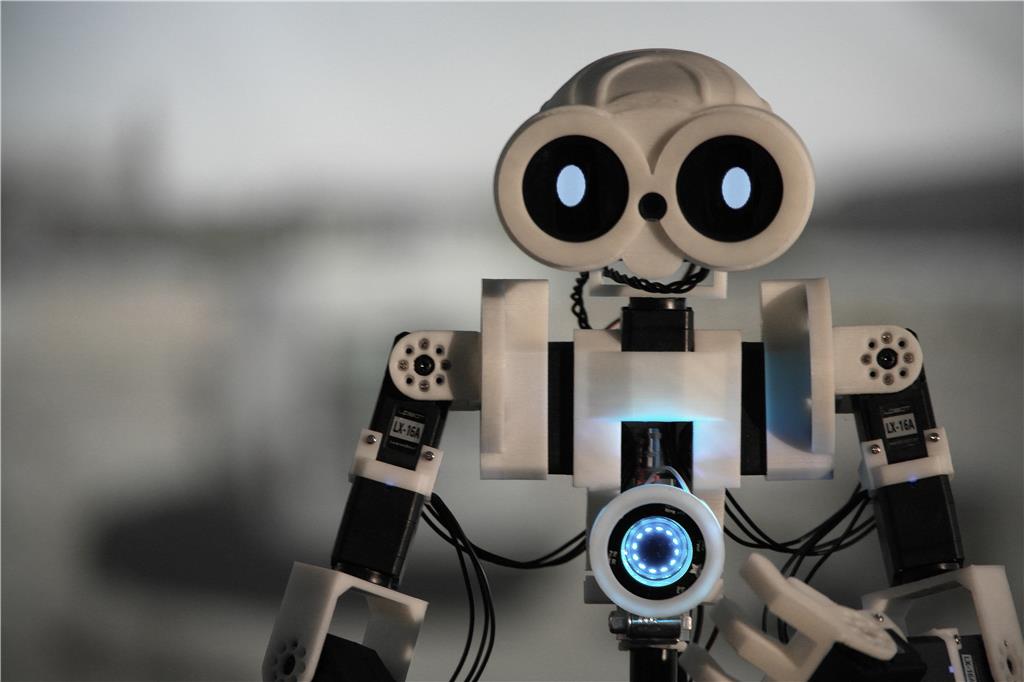

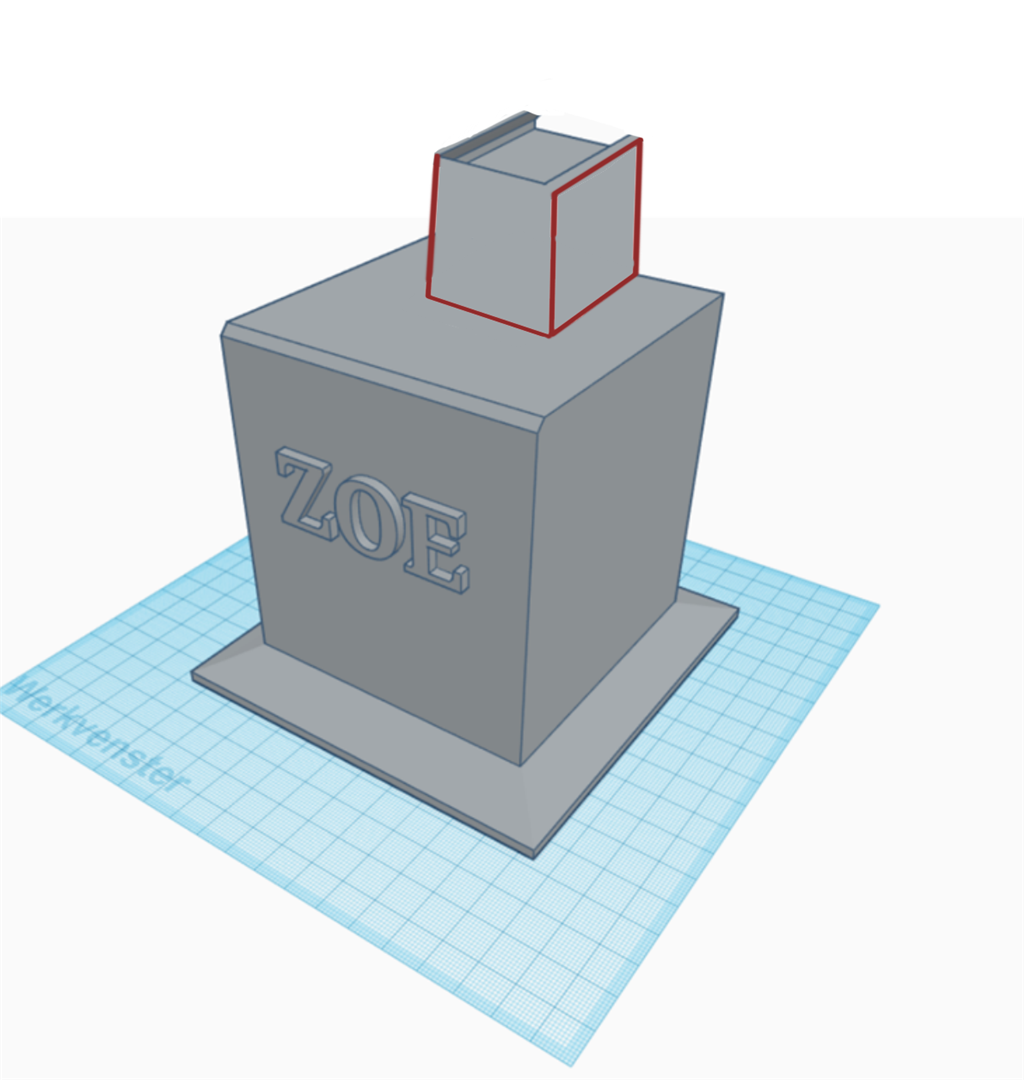

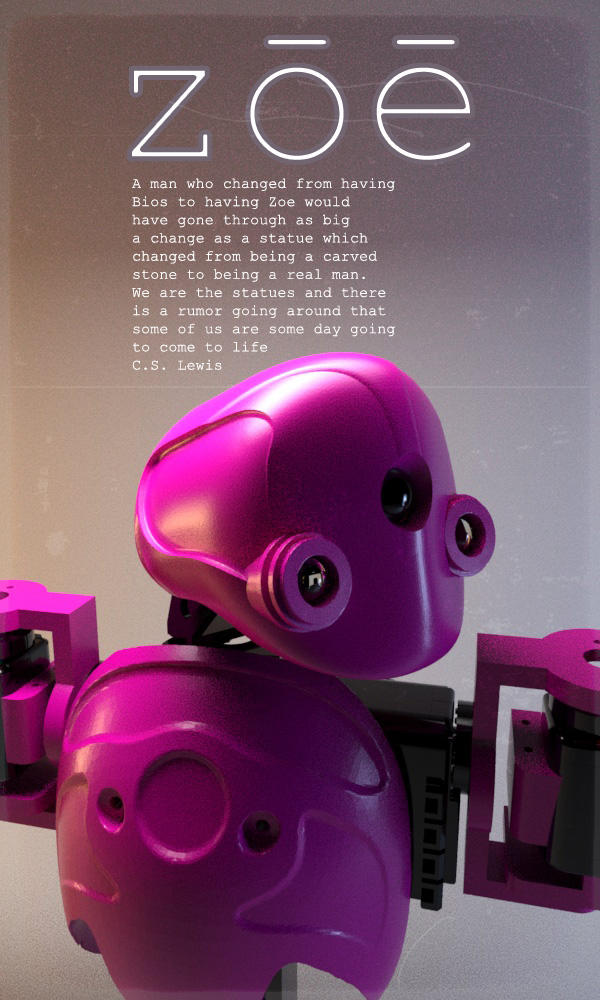
Since my robot is running on a Raspberry Pi, which is now supported by ARC, I decided to evolve my current project K[8] into a new one called ZOE... First steps will creating a new servo setup which supports Dynamixel Servos, and a new Conceptual design!!
By Mickey666Maus
— Last update
Discover more robots

Angedear's Elastic Band Gattling Gun Robot
Built with the EZB developer kit - a DIY robotics project demonstrating EZB-based development and customization
Putt's Bigmack
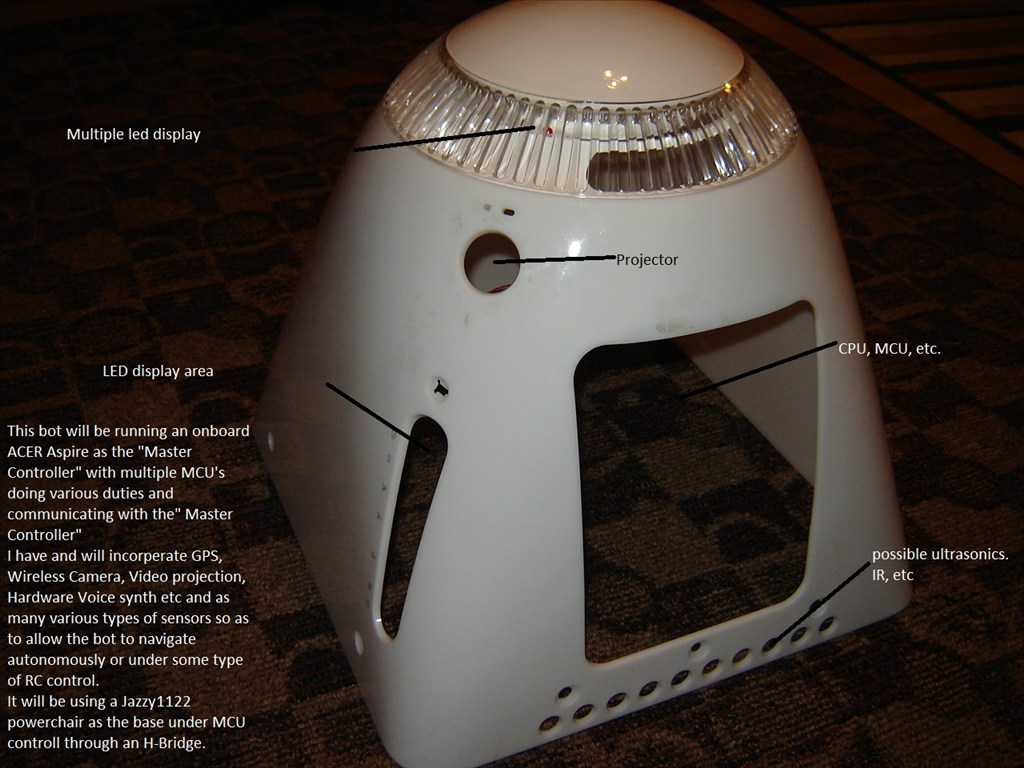
BIGMACK robotics project begins using an E-MAC housing for the head, showing initial build photos and writeup.

J's My New Toy I'm Building
Power Wheels converted with a paintball turret on bike forks, actuator for vertical control, drive speed controller and...

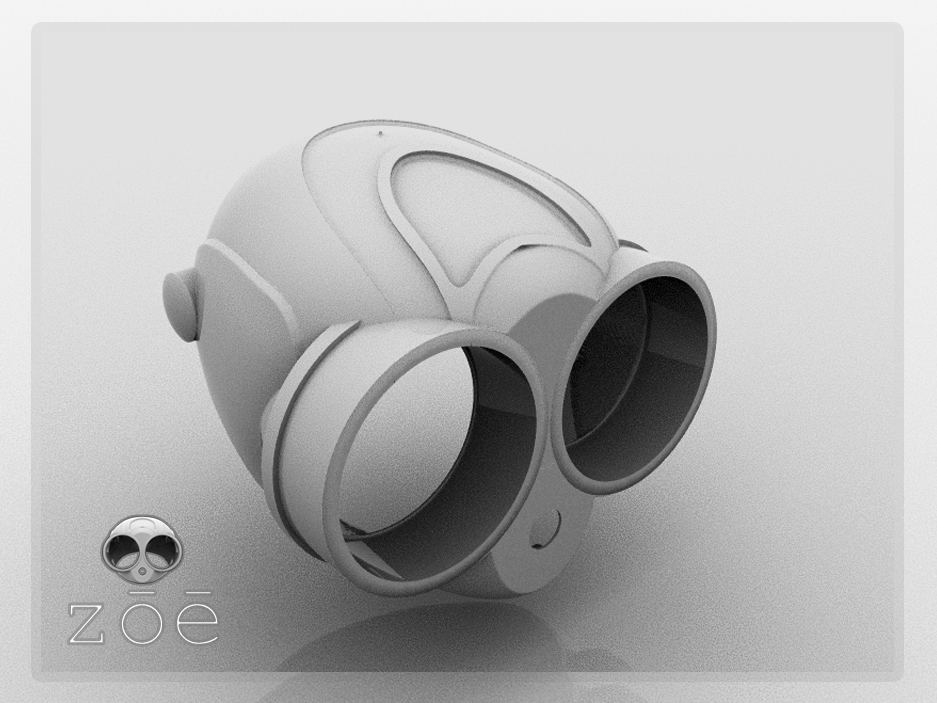
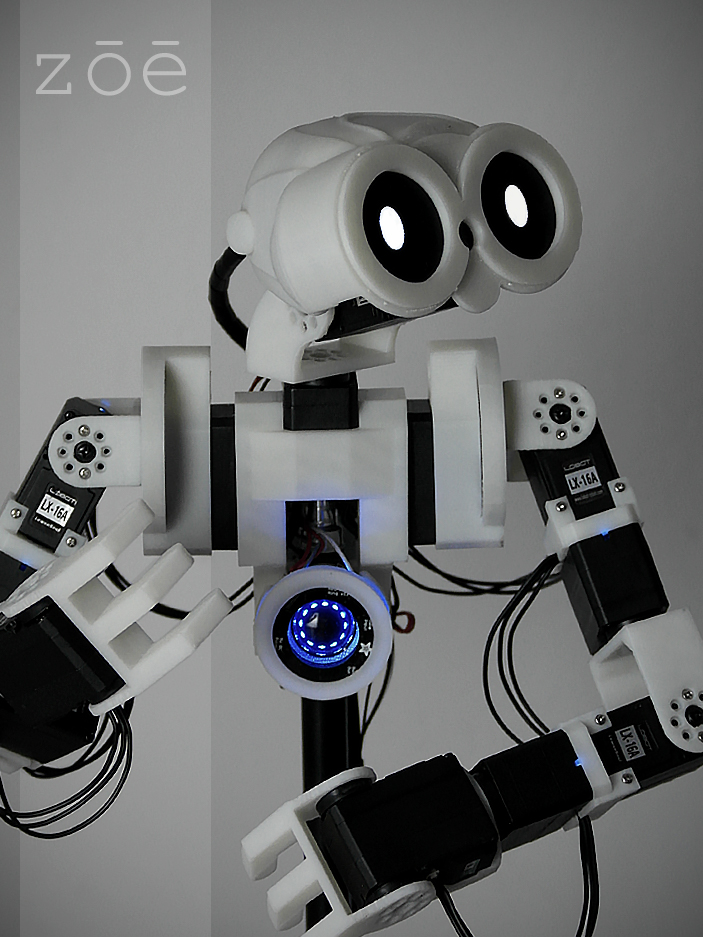
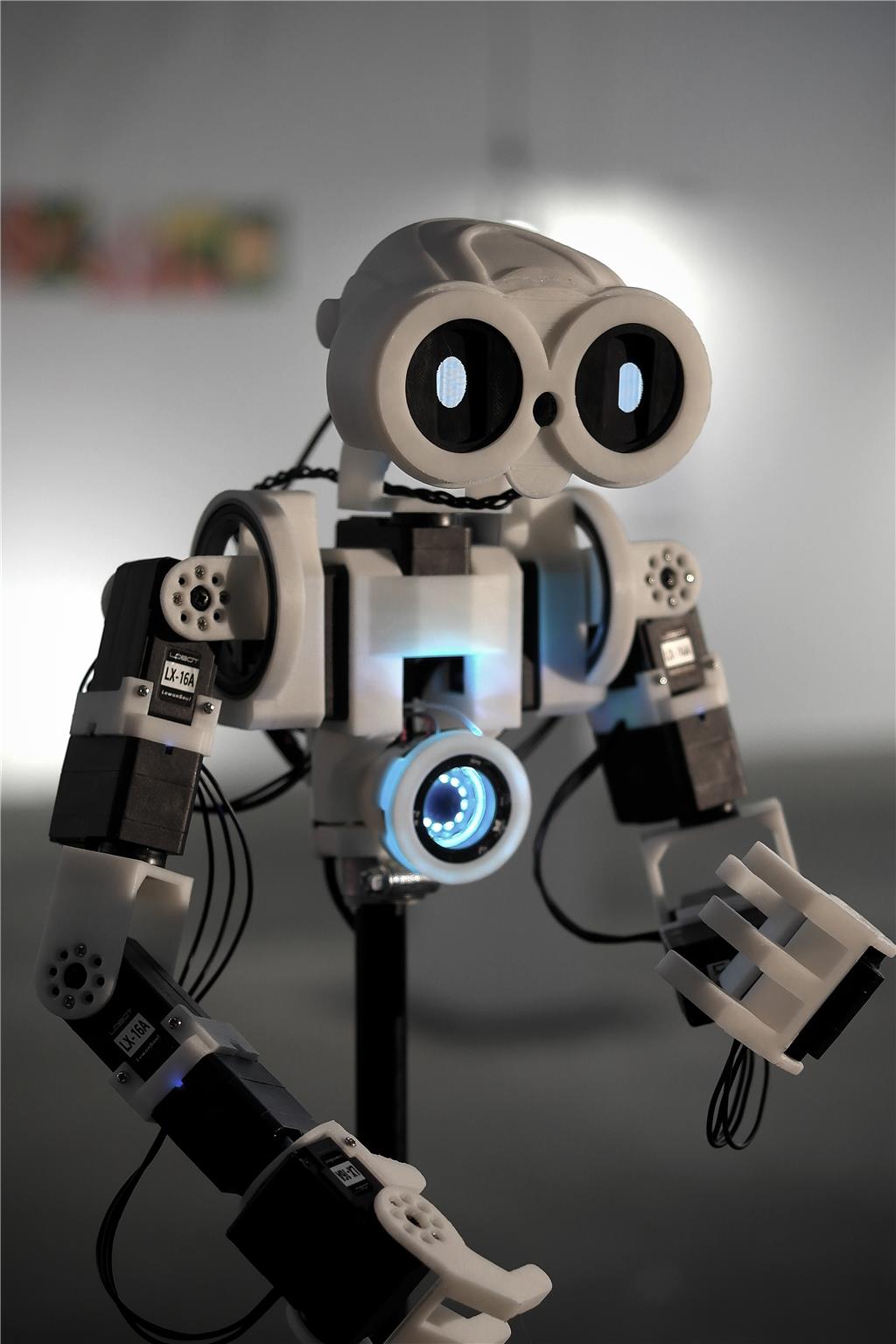
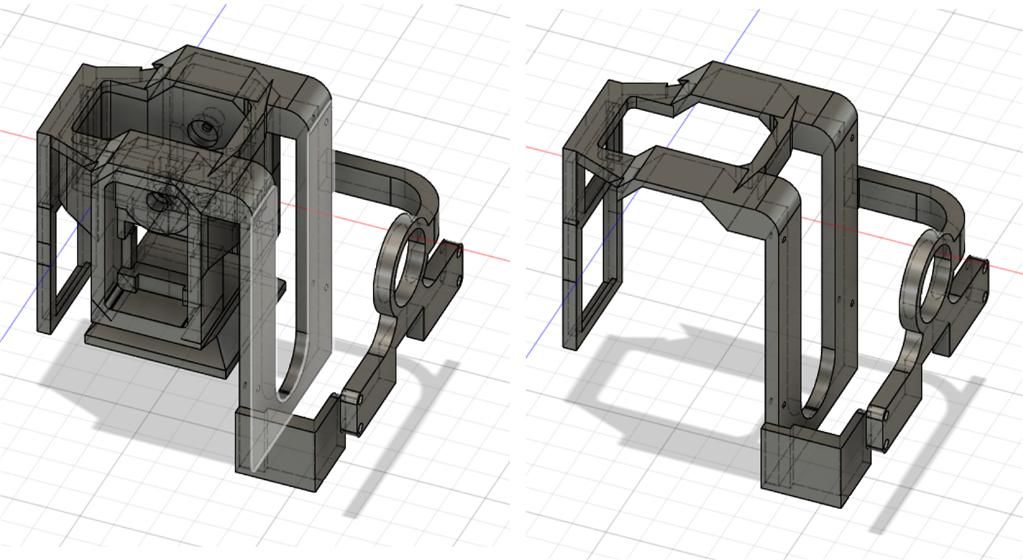
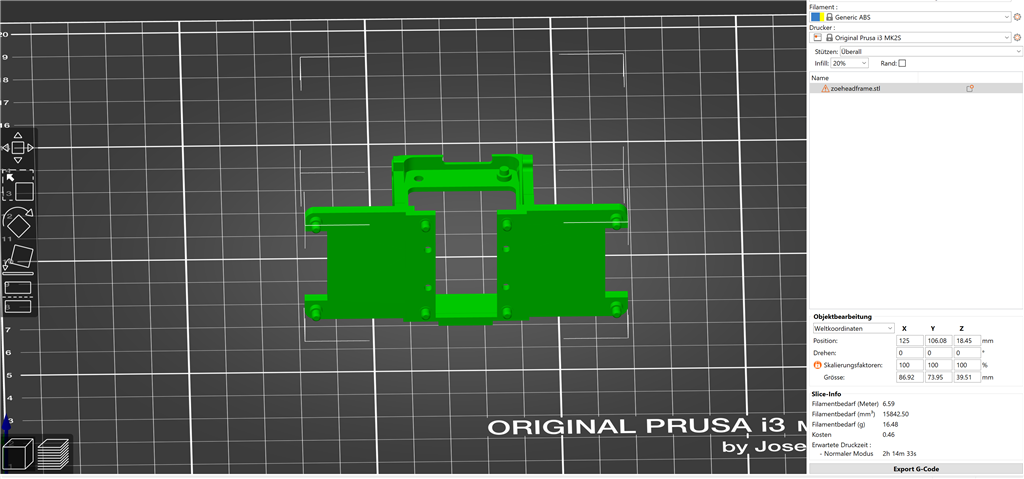
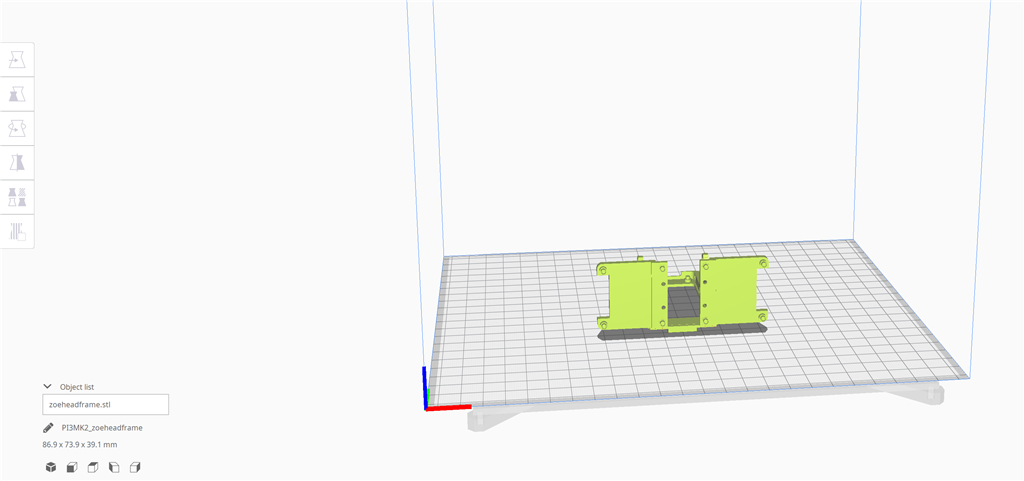
I am getting closer to the final head design..., I managed to reduce the head size by roughly 40% while keeping a lot of the features that I liked about the first design, which was way to big for what I had in mind in the first place!!
Looking great, nice work reducing the head size!
your printing skills are very good.
Thanks, guys!!!
There will be still a bit of tweaking some details, but I am happy to be making progress...
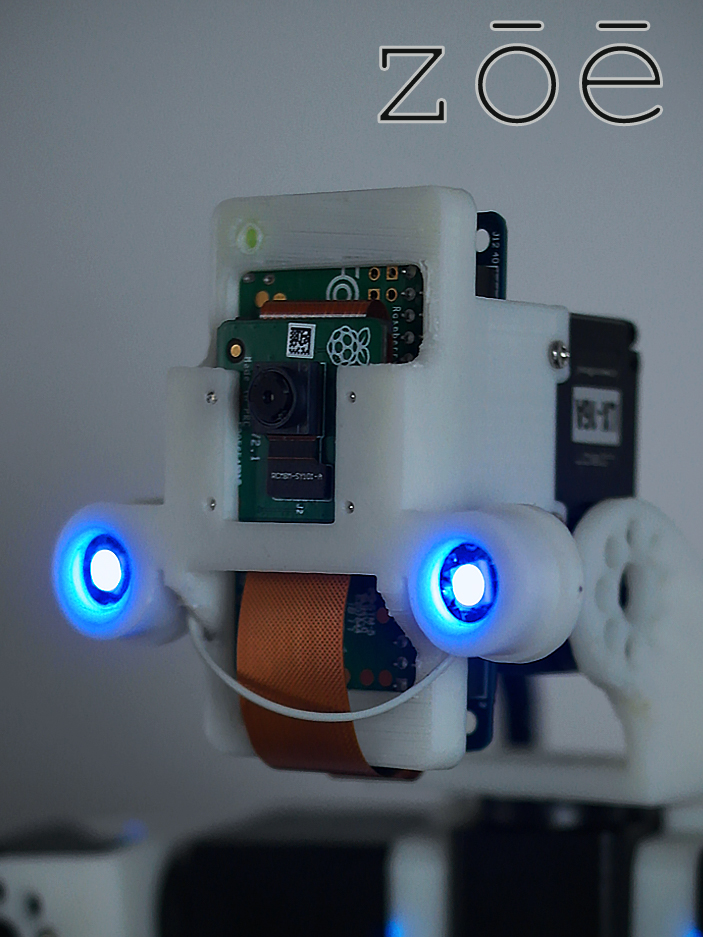
Hey, so I hooked ZOE up to ARC and everything works quiet well! Only I realized that I am not able to flip the Raspberry Pi's camera, I get the following error message...
Error Camera.SetCaptureImage: AForge.Imaging.UnsupportedImageFormatException: Source pixel format is not supported by the filter. bei AForge.Imaging.Filters.BaseTransformationFilter.CheckSourceFormat(PixelFormat pixelFormat) bei AForge.Imaging.Filters.BaseTransformationFilter.Apply(BitmapData imageData) bei AForge.Imaging.Filters.BaseTransformationFilter.Apply(Bitmap image) bei EZ_B.Camera.x5wORRJh49(Object )
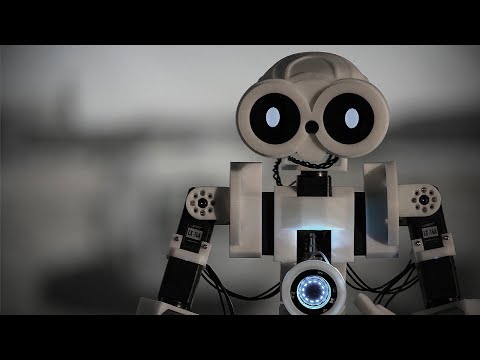
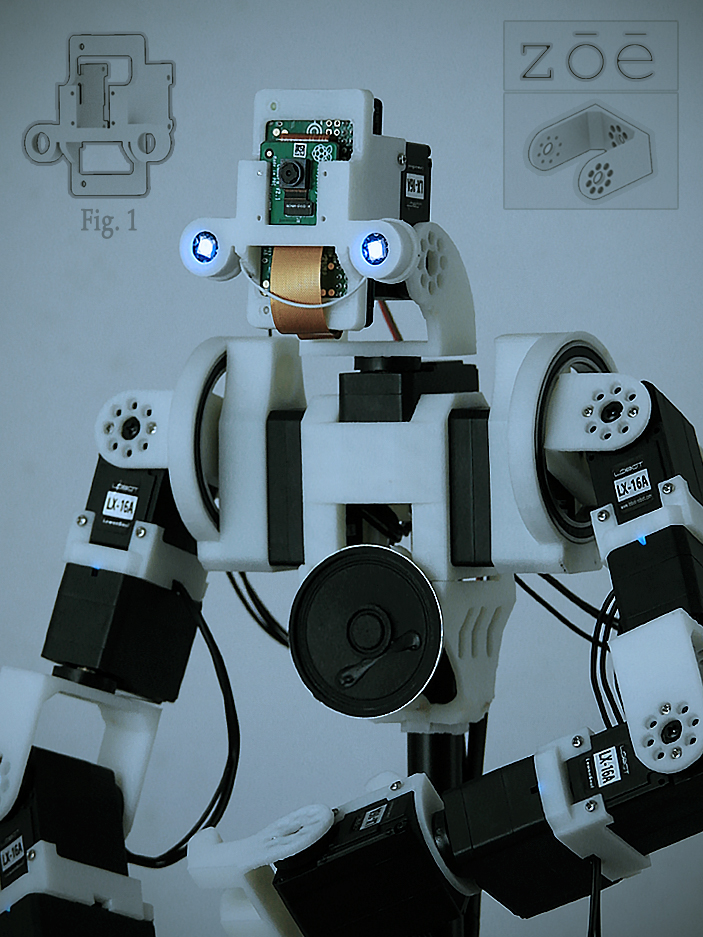
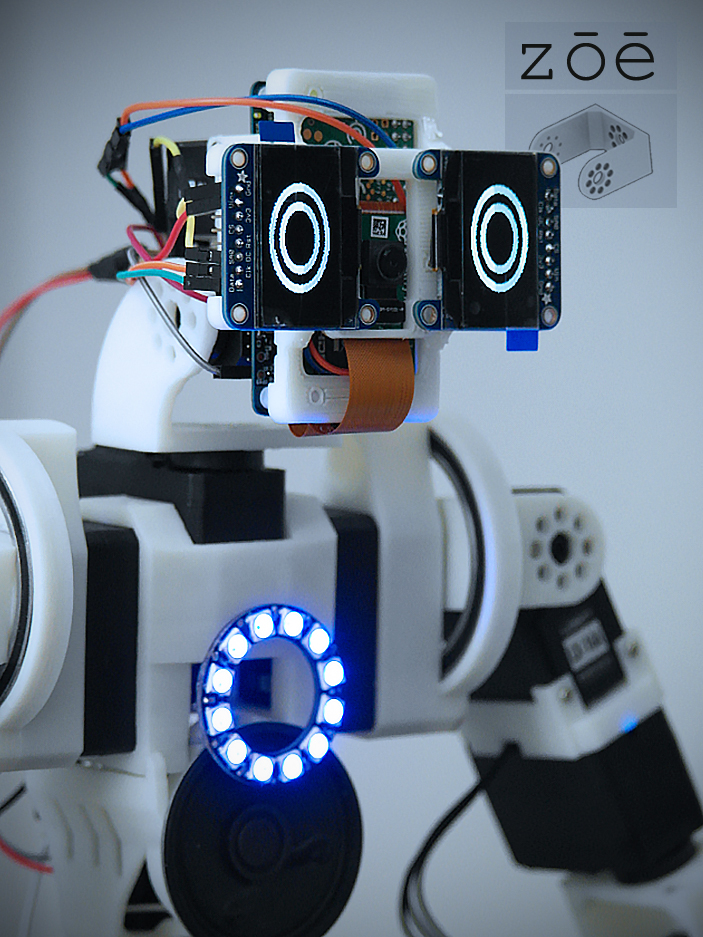
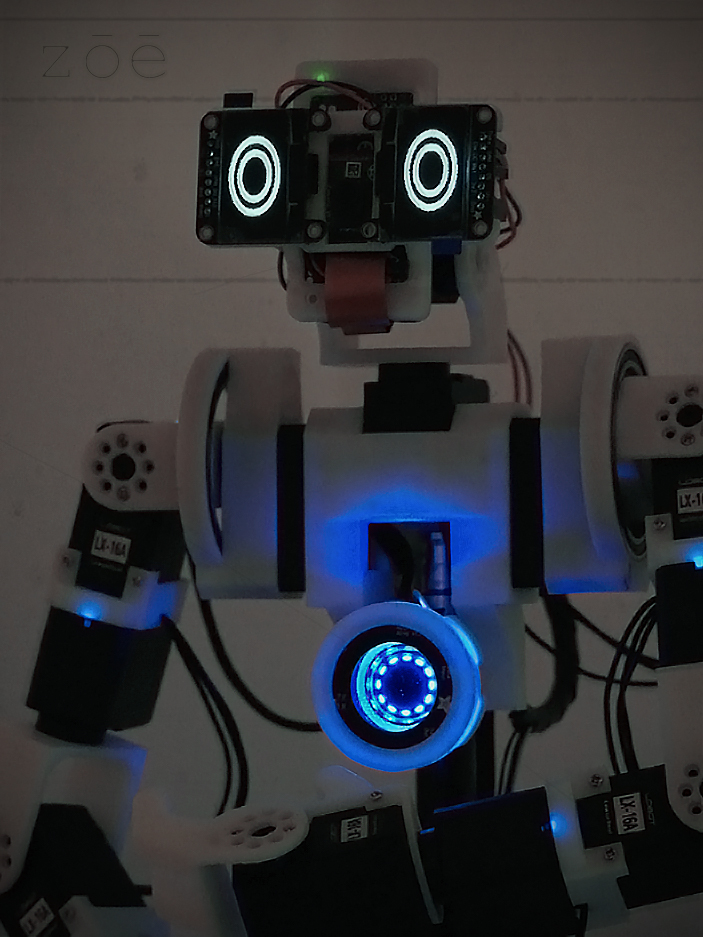
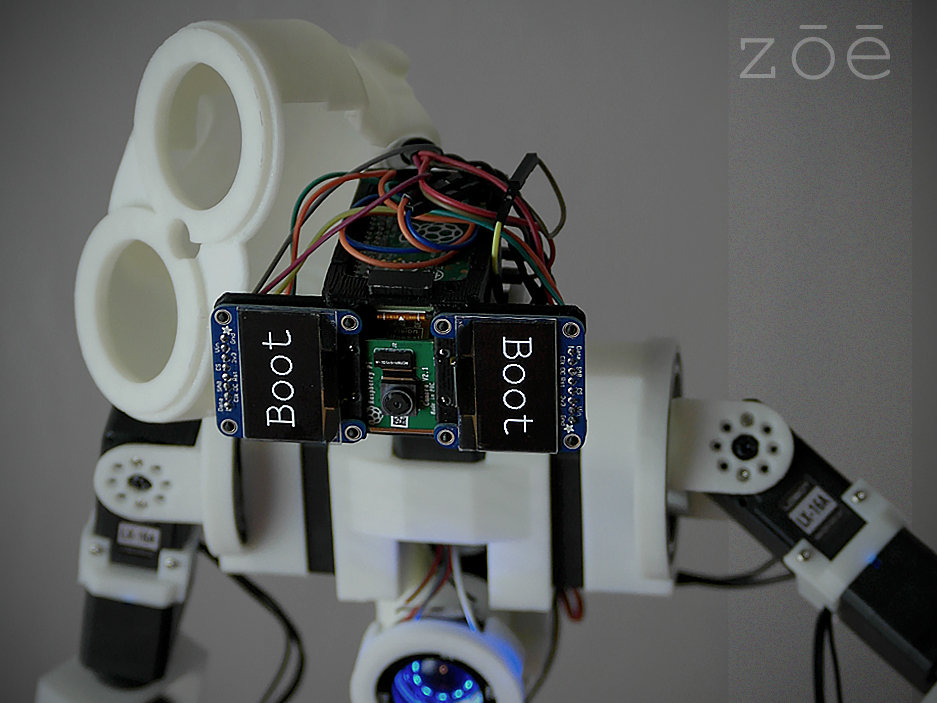
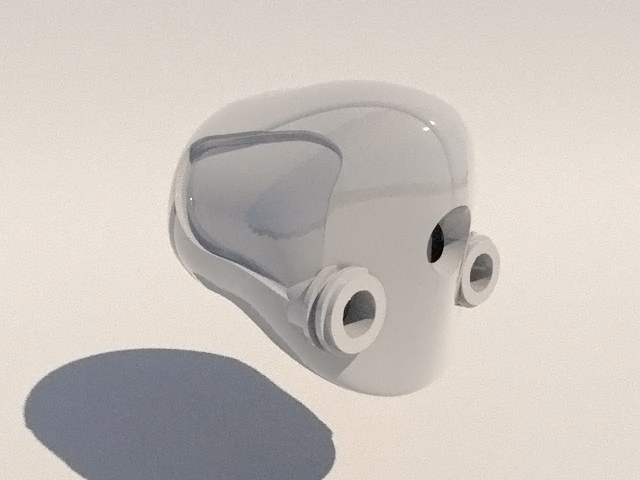
I had to increase the size of Zoes head slightly. There was a bit of the electronics sticking out and I was trying to build a chin area to cover it, but this was changing the whole look in a way that was not really what I had in mind while building. So I went for remodeling the chassis holding the electronics from a vertical setup to a horizontal one... now the head has a little more volume, but this will also allow space to fit another micro controller if needed!
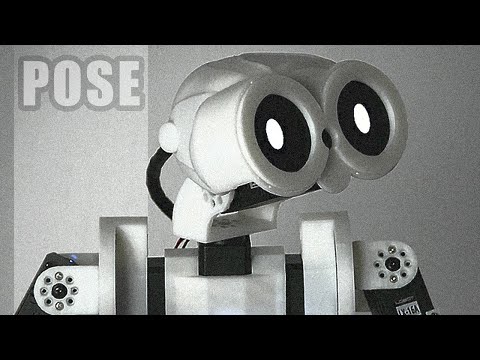
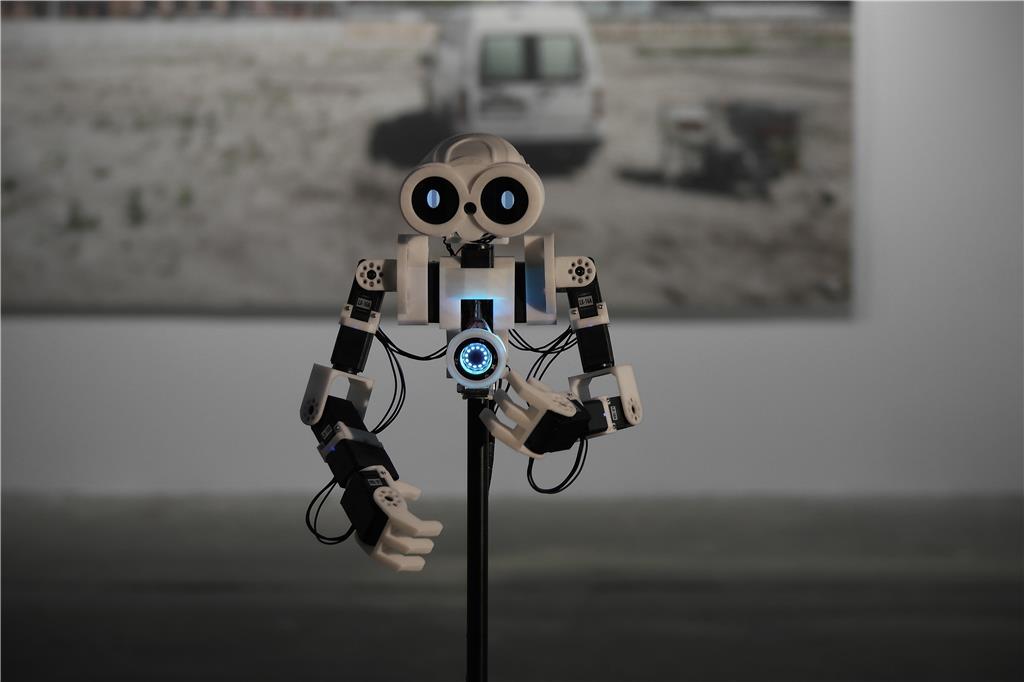
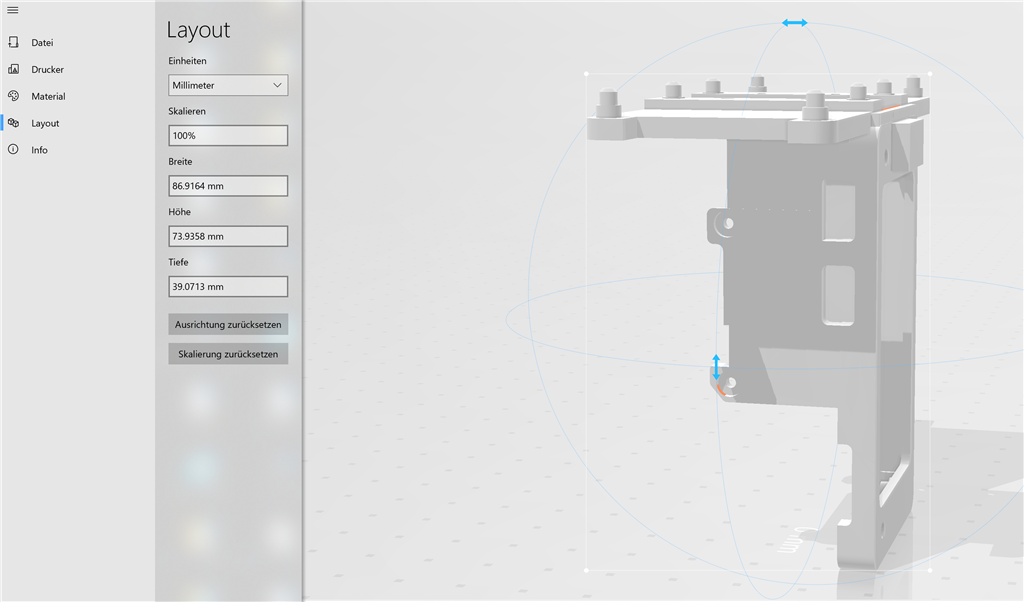
All the electronics are fitting nicely into the modified head... Next thing will be modeling a torso area!
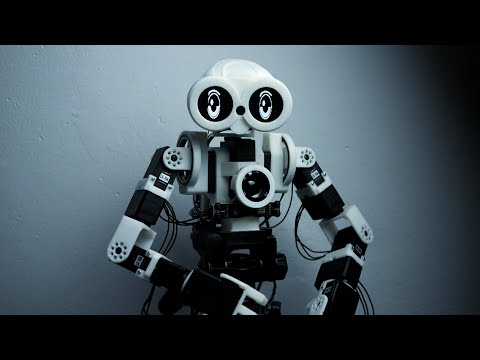
But since all the moving parts are done, I might also export the robot to Unity, so I can start testing movements. I am also considering Oculus Quest integration...any thoughts on this?
Nice! I like the head.