I made another scrap robot. Here are the pictures. She is made from parts of the Sunshine Robot, parts from the Omni-bot, and parts from the RAD robot, and an Electrical box. She is sort of a Frankenstein.
This is what I have so far.
I turned her on and connected to my desktop because I need another hub router for the usb ports.
I also haven't got any sensors on her yet. I have got only one sensor. But, I am hoping to make some progress soon.
I just slapped her together and tried to make a functional robot. The voice rec. and generation is working on the desktop soon to be transferred over the the W3 tablet.
that's about my progress.



By MovieMaker
— Last update
Discover more robots
Ezang's ESP32 And ARC - Arduino And PCA 9685
ESP32 with PCA9685 in Synthiam ARC: control 3 servos now, 16 per board or chain for hundreds; shows servo results on ARC...
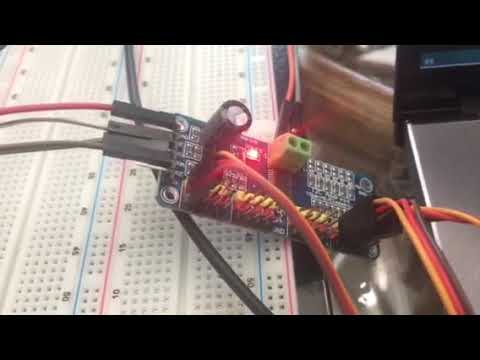
Jstarne1's Easy Led Visual Test For Digital Ports Tutorial J...
Test H-bridge ports using a servo connector: cut the red wire, use white as + and the short lead to ground to watch...

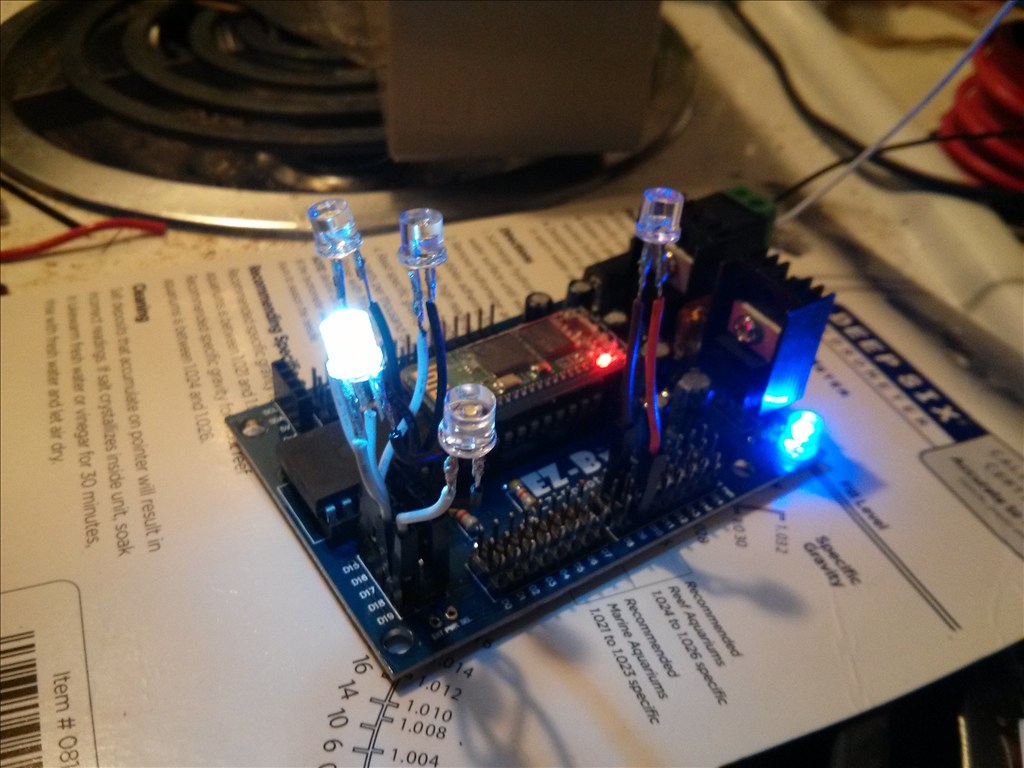
DJ's Cyborg Snowman
Animate a snowman with ARC and an EZ-B controller using webcam motion tracking, servos and voice recognition for...

double post. ....
@Rich. When I powered my unit up, the H-bridge made the robot go in circles without being connected to the EZB (power was not plugged in.) But the EZB 3 was powered up from the DATA wires, I guess. It was searching for the bluetooth, but NOT connected.
I knew you couldn't stay away. Good to have you back and building again. You should call her "your little ray of sunshine" as it's made from the larger one. If Rich doesn't answer your question there are many others here that have the answer.
looks awesome great job!
Thanks, all!
I have a red and black wire and a Grey and White wire going to ports 15,16,17,18. If I roll the robot on the carpet, it generates voltage to the EZB 3. Weird.
Change the ports you are using for the H-Bridge. I had similar issues with Melvin. It's not a wiring issue it's the fact that some ports on the EZ-B V3 will turn high on power on where they should be low.
The solution in Melvin was to change to 4 ports which do not go high when powered on, I do not know which I found in the end since I've replaced the V3 for a V4 now.
The other option may be to use speed control. If the PWM to the speed control pins isn't set the H-Bridge wont move even if some of the In ports are high.
Spinning a motor will generate current, it is the dynamo effect, you are basically generating electricity (like a dynamo on a bicycle). Some batteries can be harmed by doing this as can some controllers. To avoid this you can include diodes however on small robots it's generally not necessary.
Thank You, Rich,
One thing I thought of is that I am using ONLY the signal wires, not grounds or middle wires. Could this be the problem?
If you are using one battery then no since your ground is common anyway (if nothing else but at the battery terminal).