
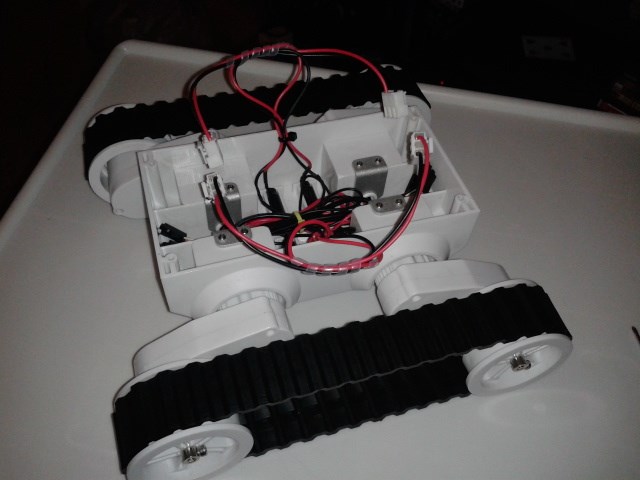
I made another scrap robot. Here are the pictures. She is made from parts of the Sunshine Robot, parts from the Omni-bot, and parts from the RAD robot, and an Electrical box. She is sort of a Frankenstein.
This is what I have so far.
I turned her on and connected to my desktop because I need another hub router for the usb ports.
I also haven't got any sensors on her yet. I have got only one sensor. But, I am hoping to make some progress soon.
I just slapped her together and tried to make a functional robot. The voice rec. and generation is working on the desktop soon to be transferred over the the W3 tablet.
that's about my progress.



By MovieMaker
— Last update
Discover more robots

Jeremie's Ravage The VHS Tape Robot
G1 Transformers-inspired Ravage VHS tape robot with EZ-B IoTiny, 360 servos, LiPo battery and fold-down stand for...

Toymaker's Losing Louie (Drone 3 From The Movie Silent...
Custom 'Losing Louie' diorama and handcrafted drones inspired by Silent Running-stunning detail by Destiny Models with...
Billderwent's Boris V2
Boris V2 Dagu Rover 5 upgraded from EzB/Mecanno with 4 motors and encoders, separated channels and secured encoder...

I encountered the same problem since I am using a window motor and a homemade h bridge using 4 Tip120's for my Dirgebot's shoulder...my solution was to have a separate physical switch to boot up the computer and EZb and another to power up the motors. Not a permanent solution since I'm gonna upgrade to V4 soon but it works for now.
Thanks, Doombot and Rich
Hooking an LED to the ports and testing where the state was on initial turn on worked for me.
I am moving on to another problem. I will post it as a question.
Thanks!
Well, I finally named her "Sally" because it seemed to fit her personality. Thanks guys for all of the suggestions.