





















Hello to All,
Here is the Walmart R2D2 project.
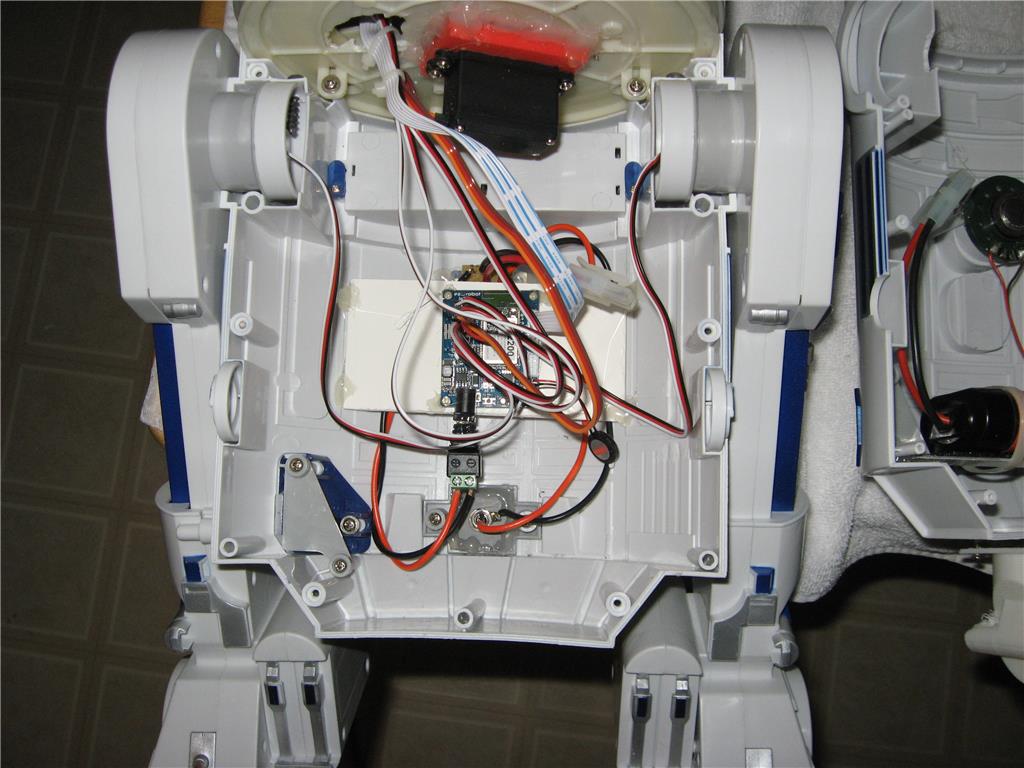
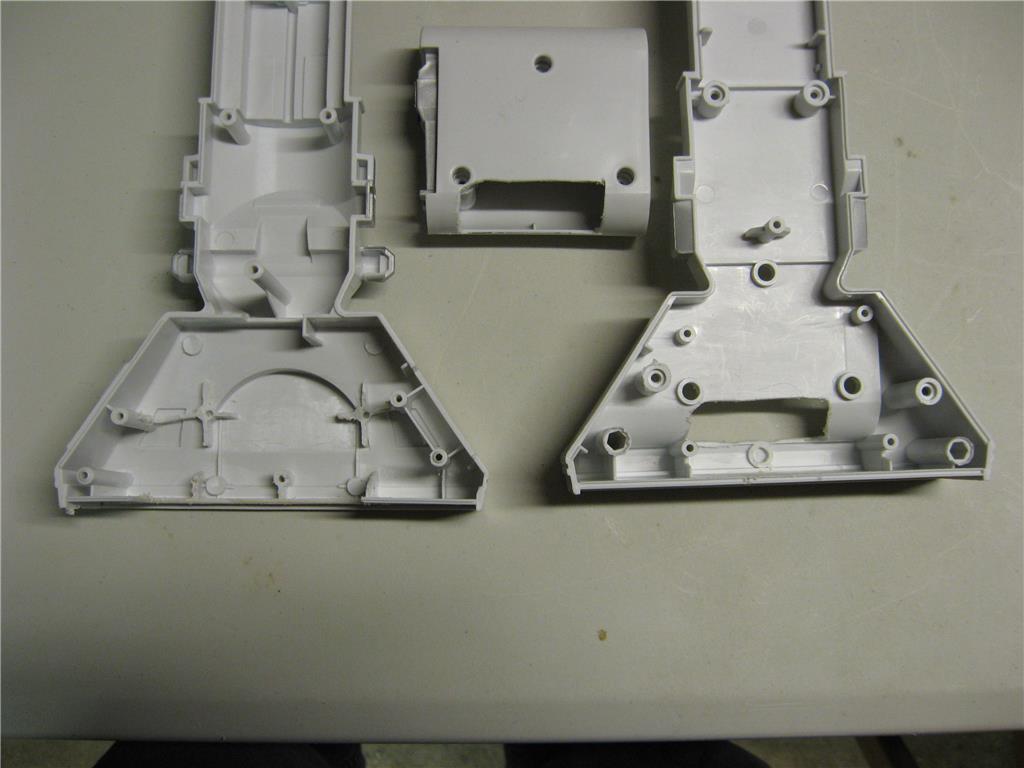
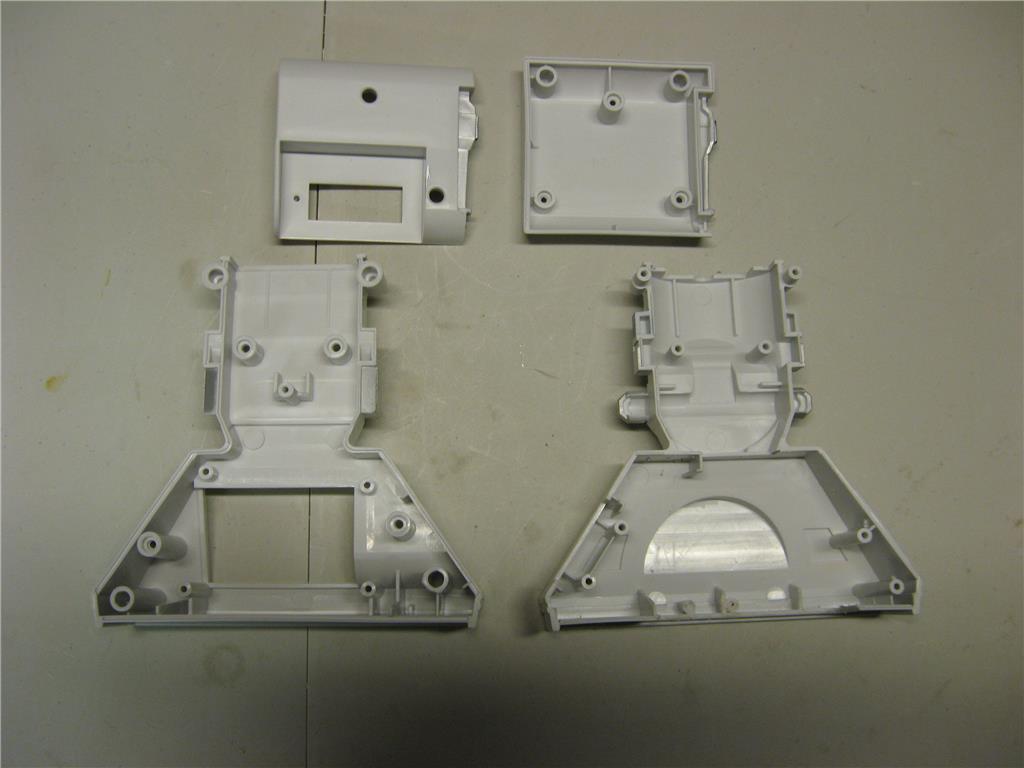
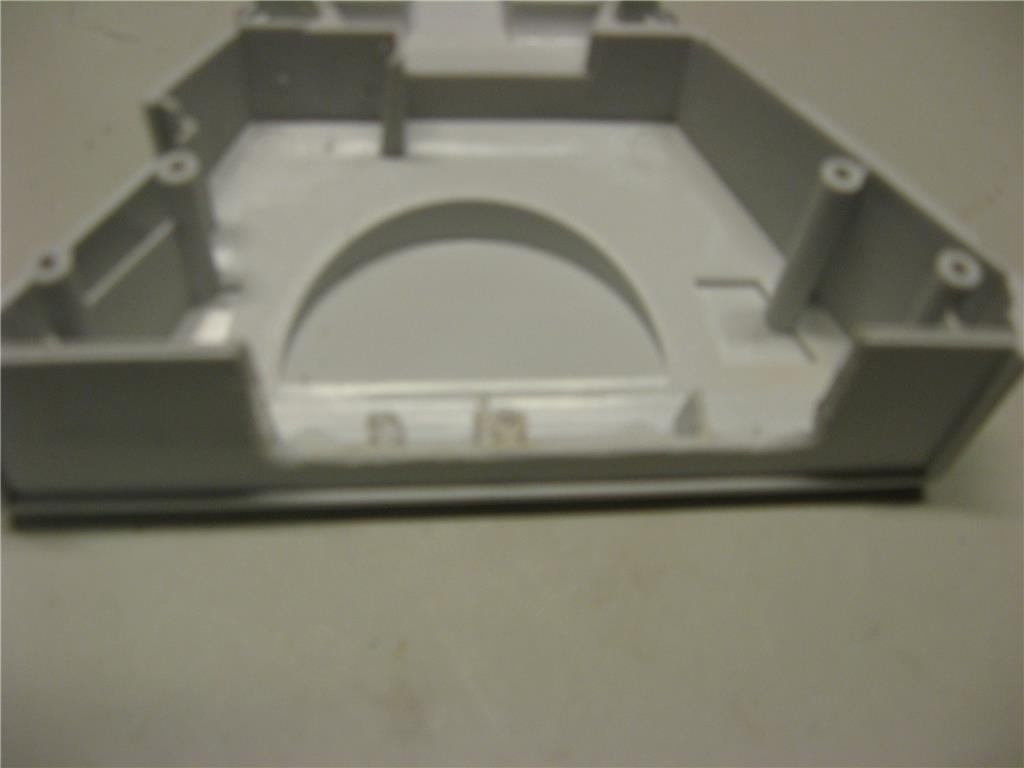
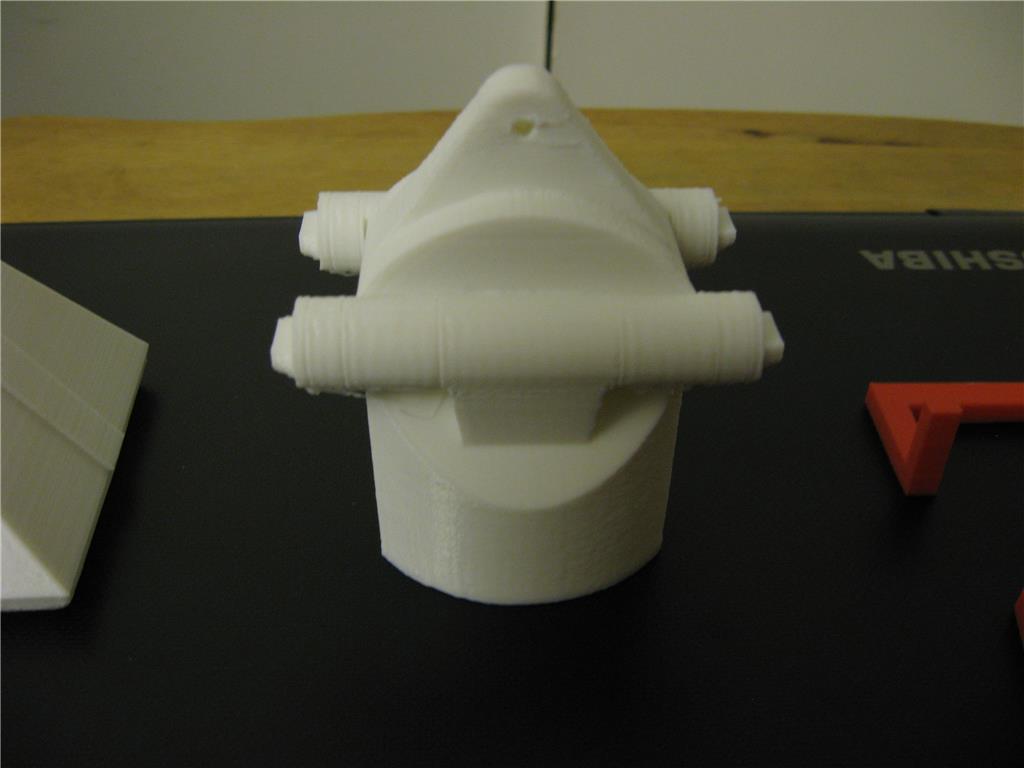
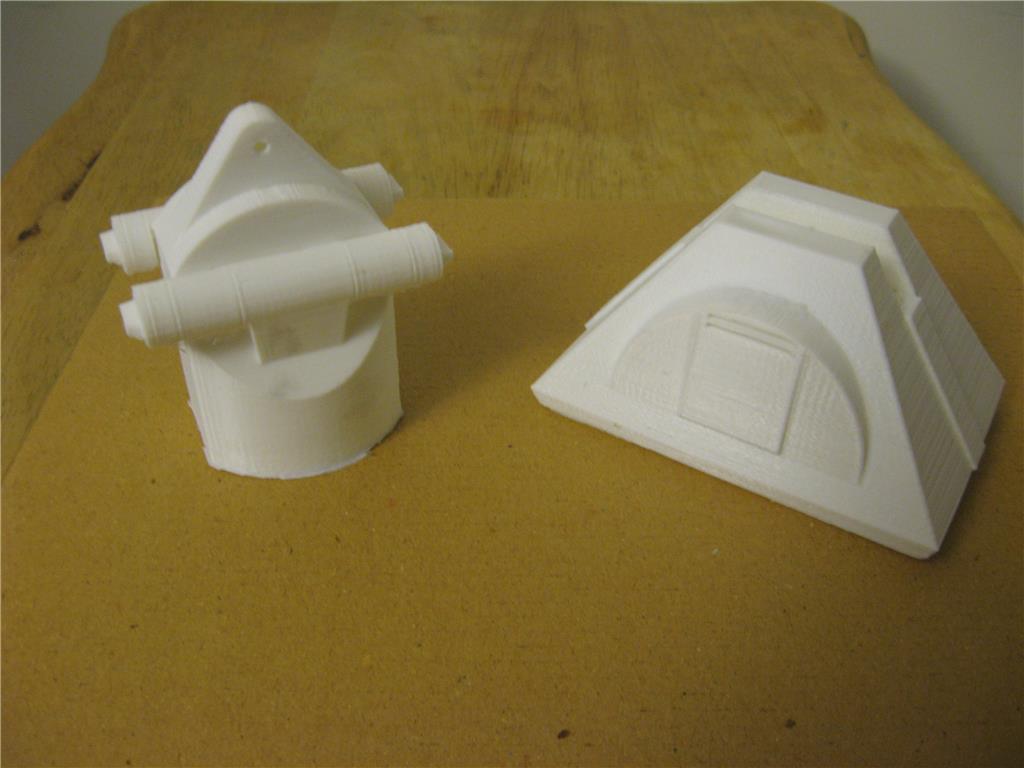
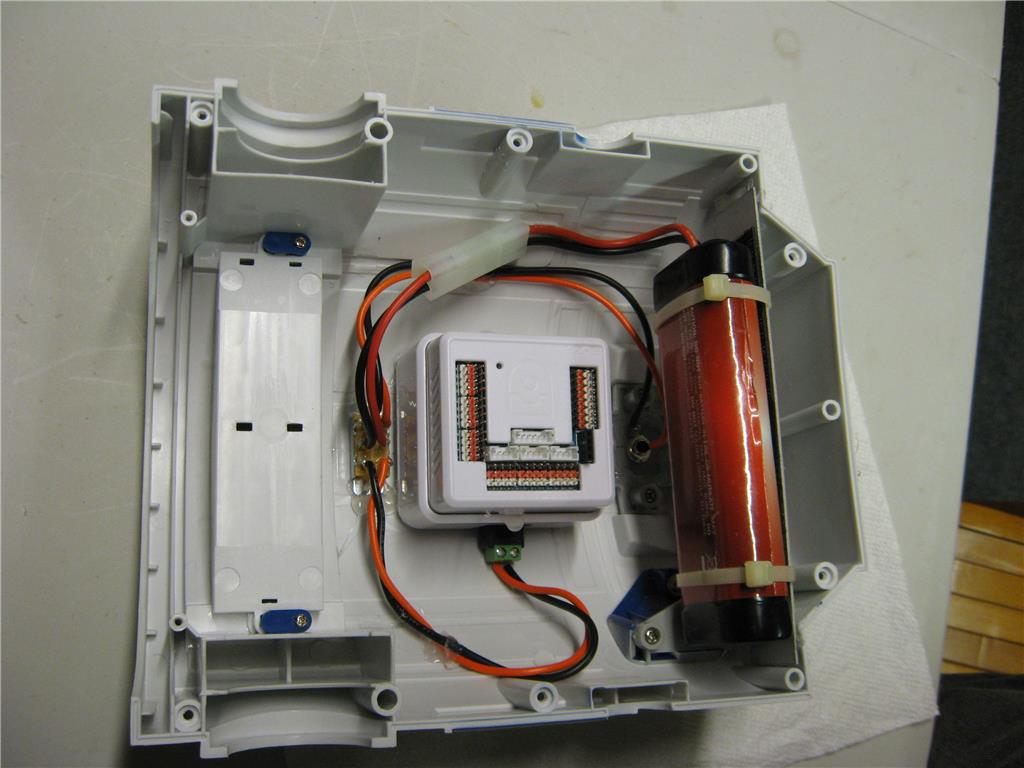
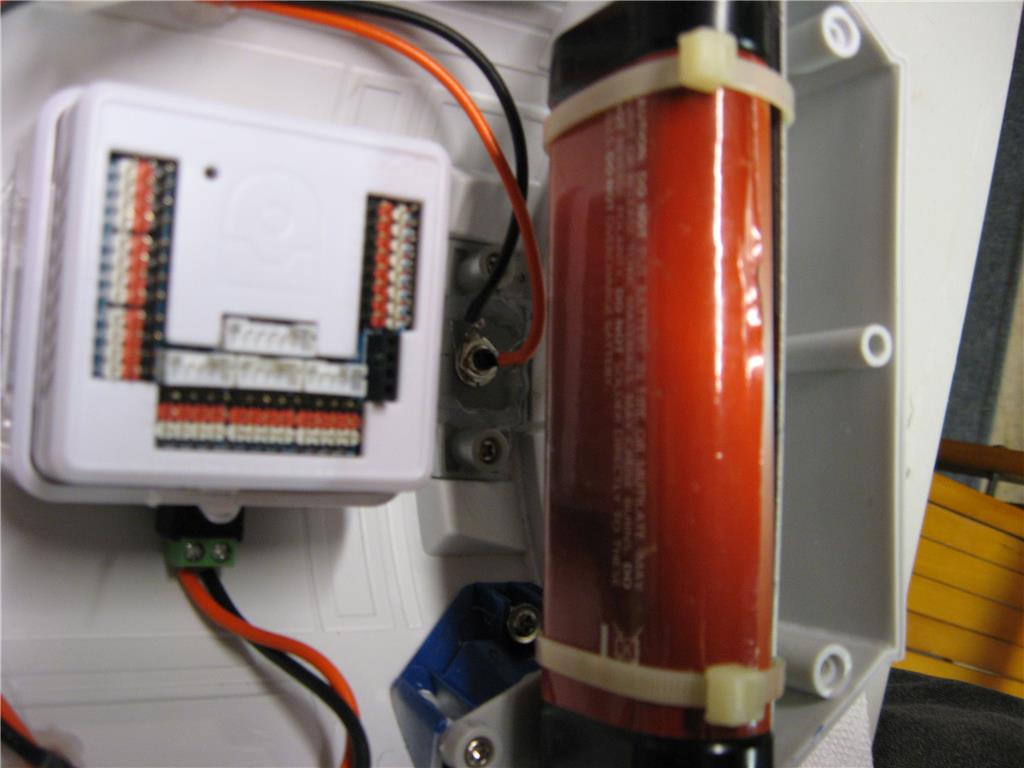
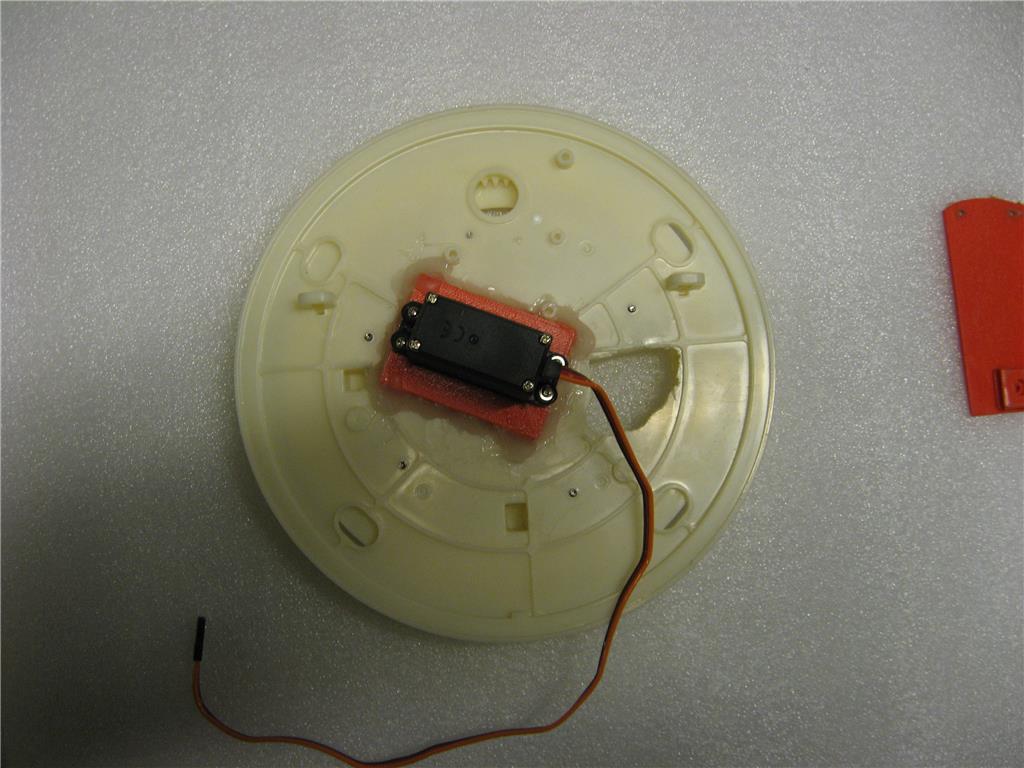
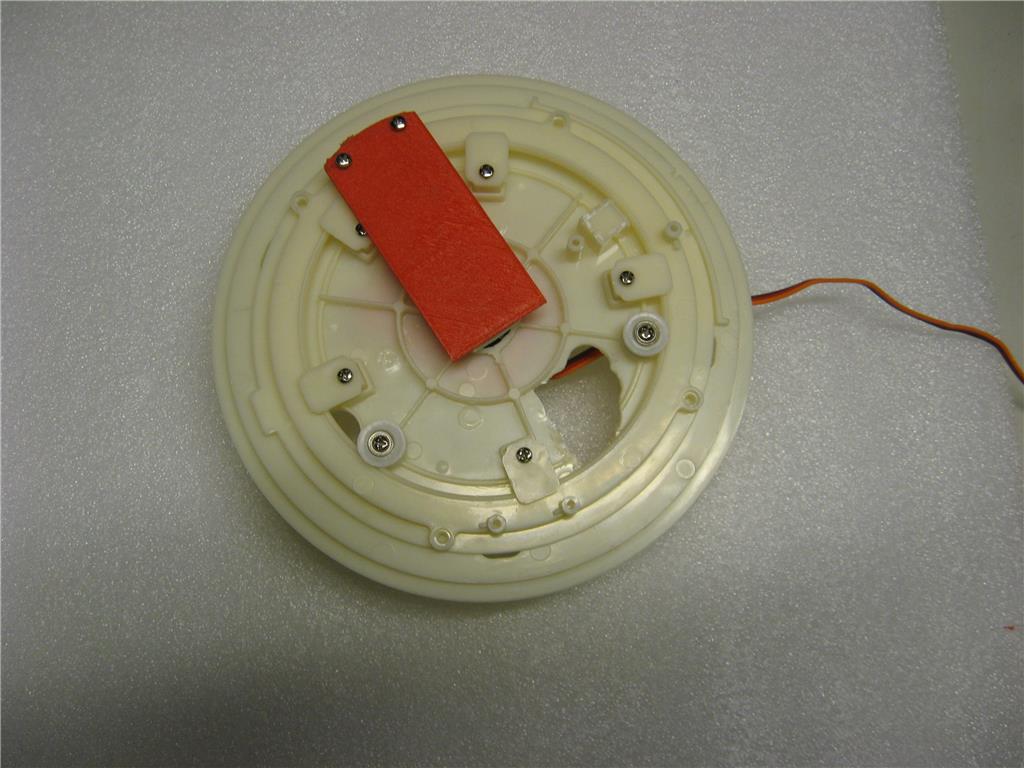
I disassembled the unit and was surprised to find it was more than a shell. There are opportunities to use the inserts in the dome to mount LEDs and a camera, and a bearing ring which has a ring gear to allow the easy installation of a servo or gearbox to move it. I found, using a flashlight, lights can be mounted against the skin to light up the panels.
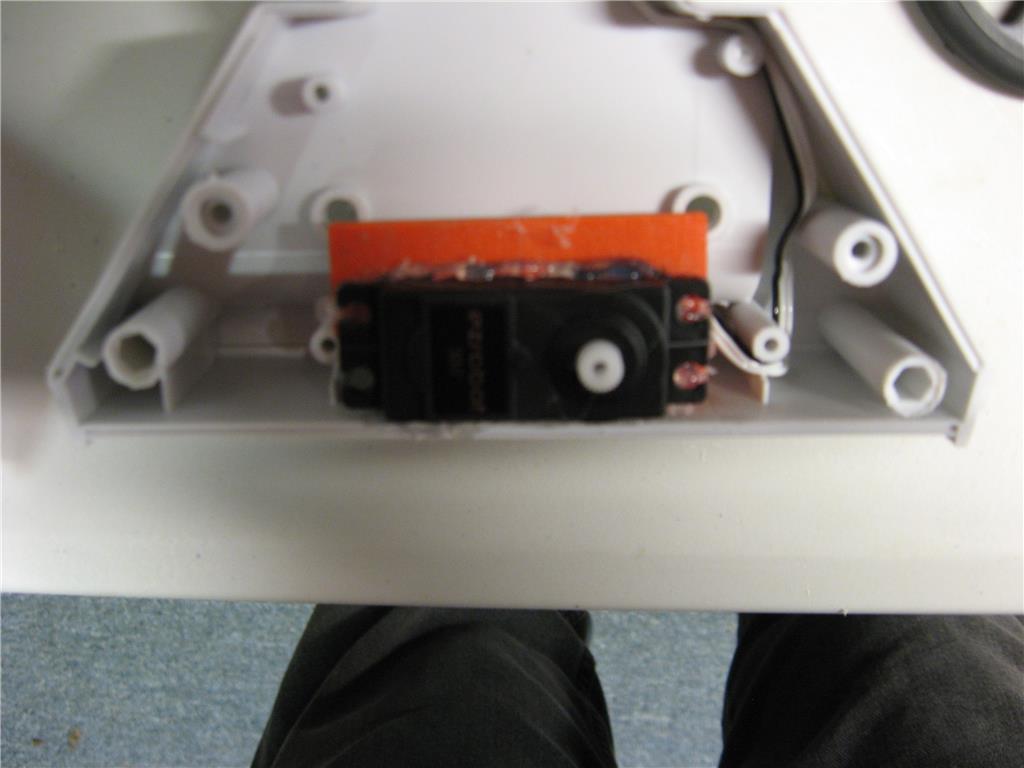
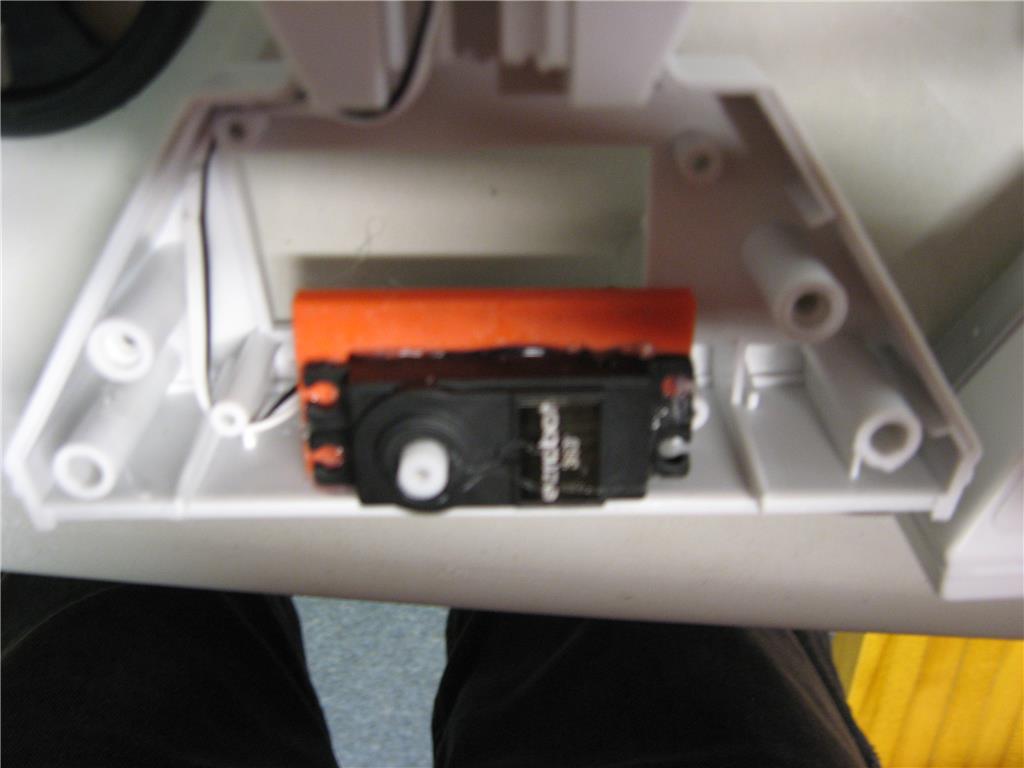
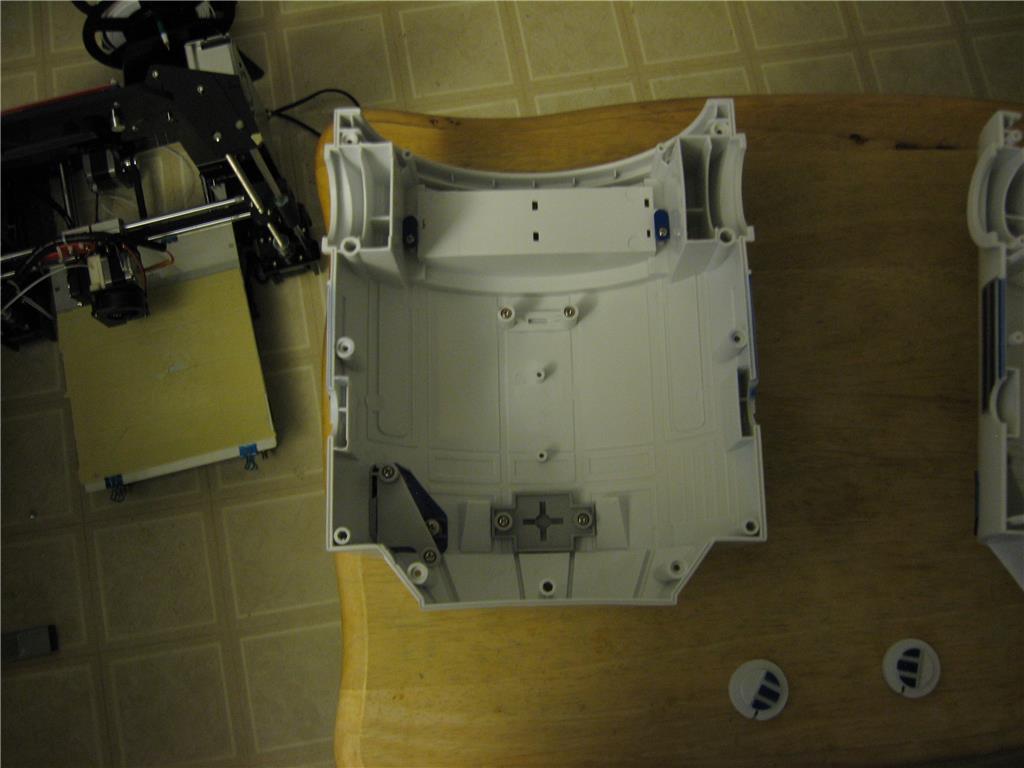
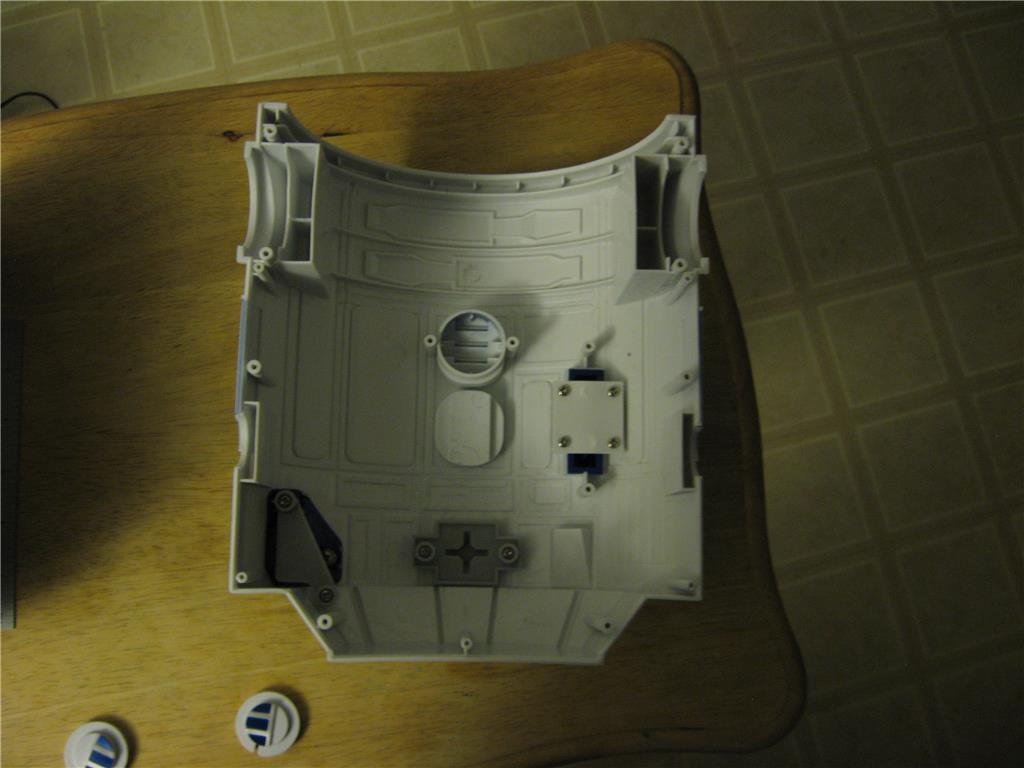
The body has some areas which can be modified or changed out for more flaps or lights. Due to flat areas on the bottom of the body, mounting an additional front foot should be somewhat easy.
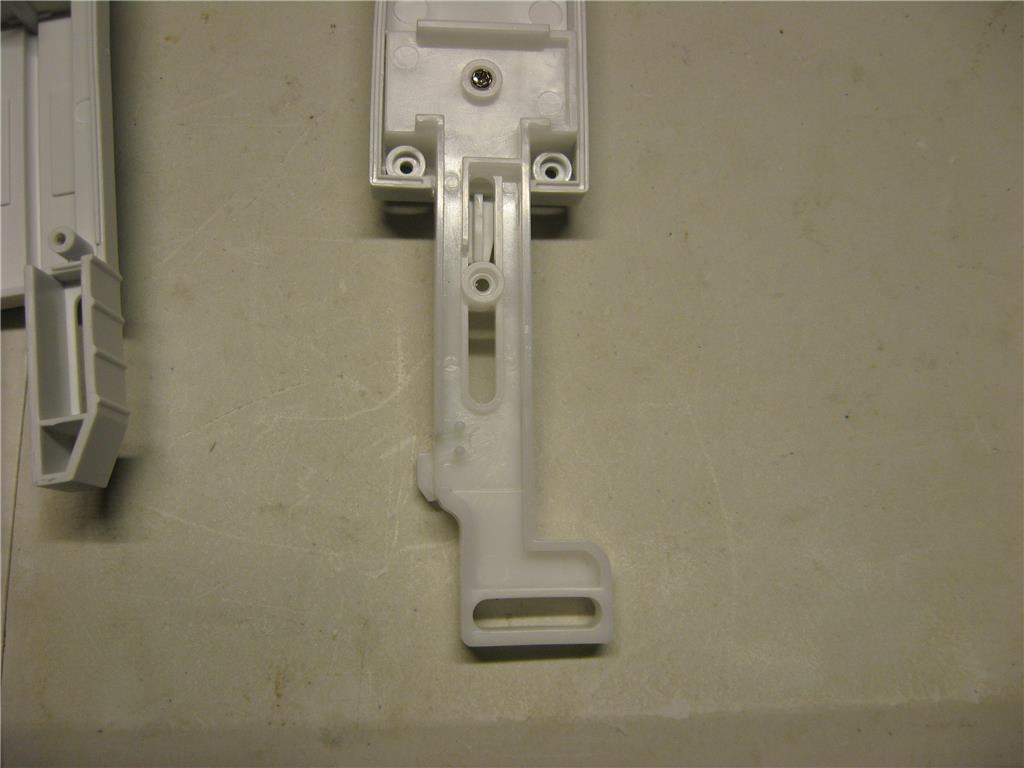
The legs have a flat bottom and a pod to mount either a motor or continuous servos for the drive.
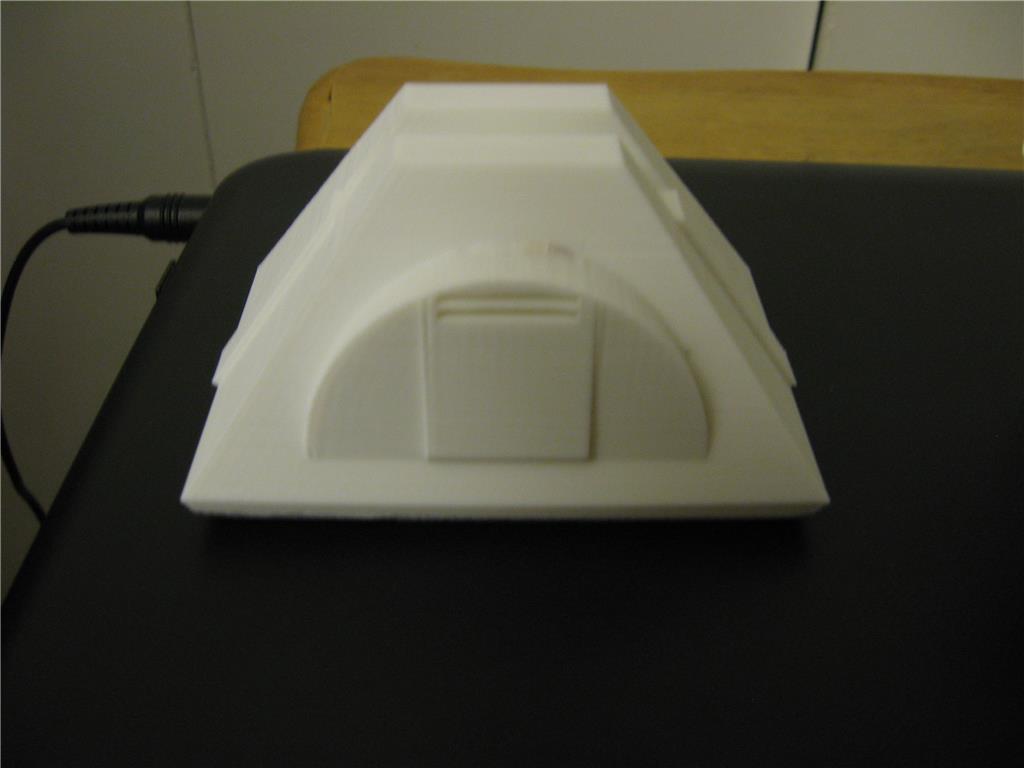
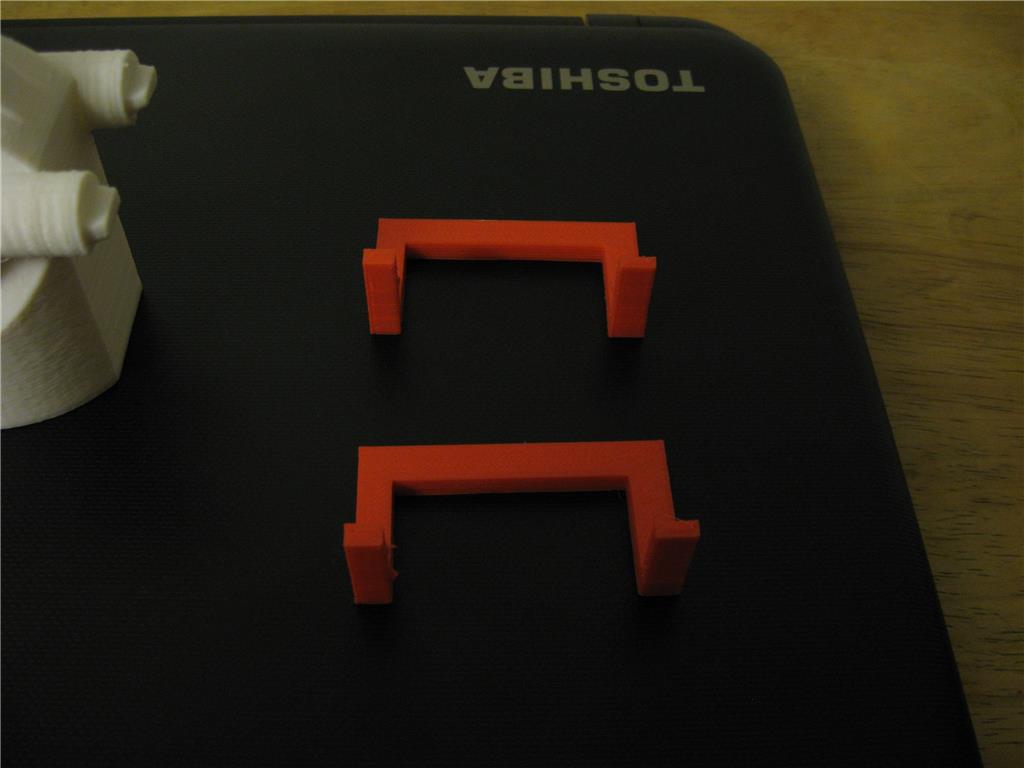
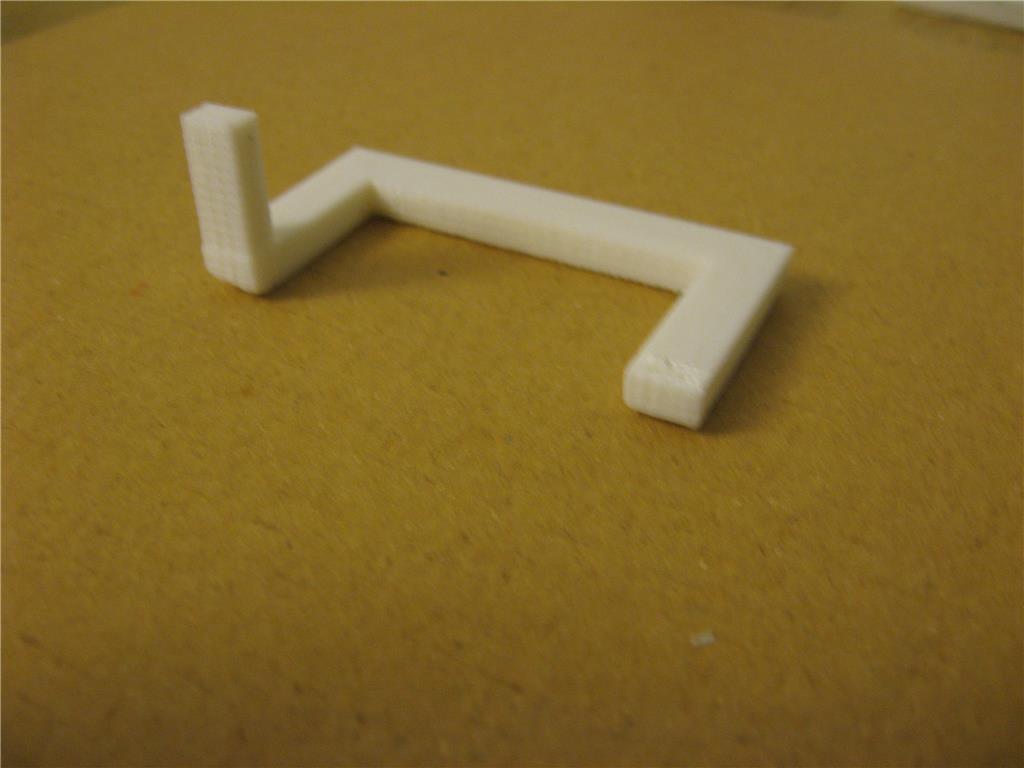
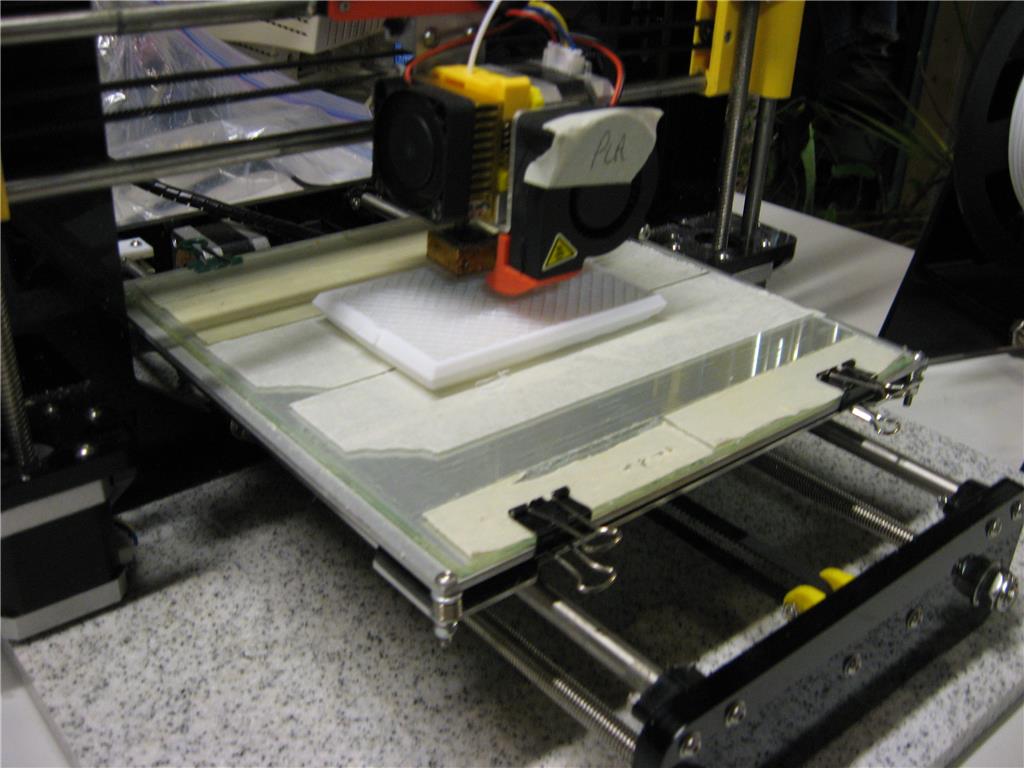
I will soon begin the build by 3D printing a front foot and mount to see how the project will come together.












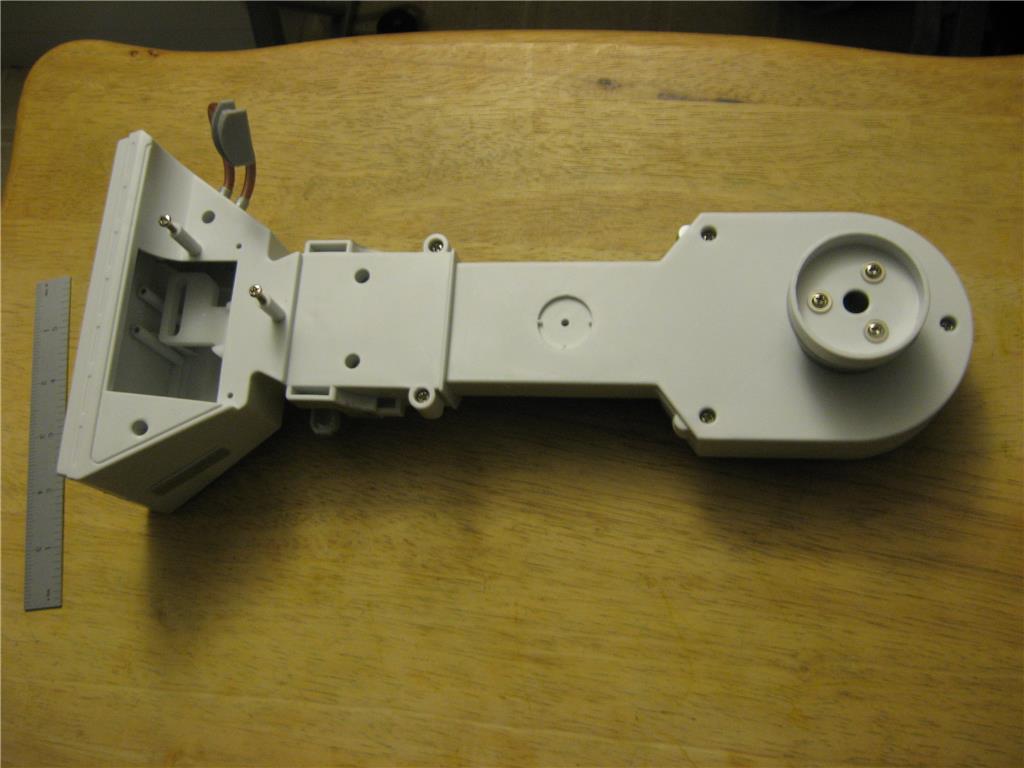
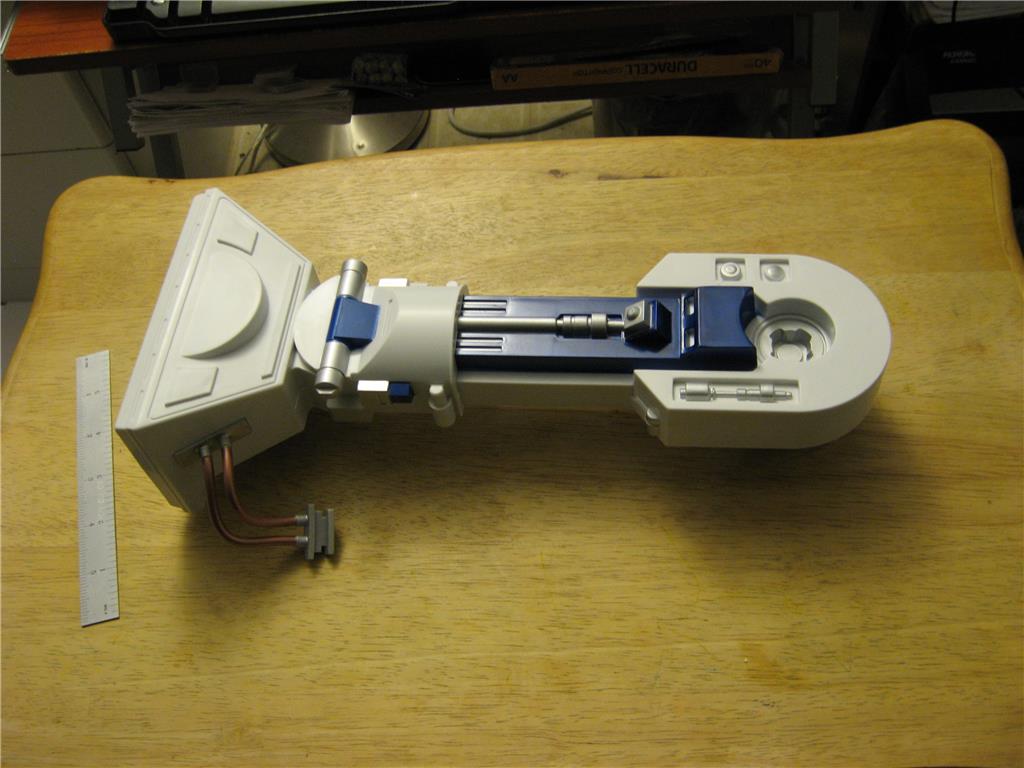







There is a 6" Ruler in the front of the pictures for reference.
Ron R
Discover more robots
DJ's Ips (Indoor Positioning System)

Xuven's Project Atlas 1.0


Hi Steve, I wasn't able to try it yet. I hope it works.
Thanks for the great idea about the front foot. I think it would work well and look good. I just need to see if the sensor can fit maybe in the leg also? If not, the foot should work fine. I will need to cut it up and try it.
By the way, have you heard of anyone "splitting a ping"? I mean use one ping as a transmitter, another ping as a receiver? The transmitter is stationary, the receiver sweeps. What do you think?
Be Well, I'm enjoying Eddie.
( I still like droopy ears )
Ron R
Hey Steve, I can't seem to find the compass fix. Have you seen it? It's not in the normal i2c, or tutorials.
Ron R
Yeah, gotta love the ears, lol.
I actually haven't heard of splitting a ping, but unless I'm missing something, I don't see what the advantage of that would be.
One thing to be aware of is the ground clearance of the foot/feet if the ping was to be fitted in the foot skirt. Too close to the floor could trigger false readings, so maybe the leg would be a better idea.
Just me burning brain cells again. I'm trying to get some way to determine robot location. Two plane radar, like the idea I tried using two cameras on servos 90 degrees from each other.
I will clamp it on first to see where it works best. Thanks for the heads up.
That cool. Here's the release notes link for the ARC update with compass improvements...
https://synthiam.com/Community/Questions/8974
Compass fix didn't work for me. Looking forward to you trying it though to see if maybe I have a bad sensor. It at least is reporting in degrees now instead of nonsense values, they just don't relate to the direction it is facing or how far it moved
Alan
Thanks, I hope they figure it out.
Ron