












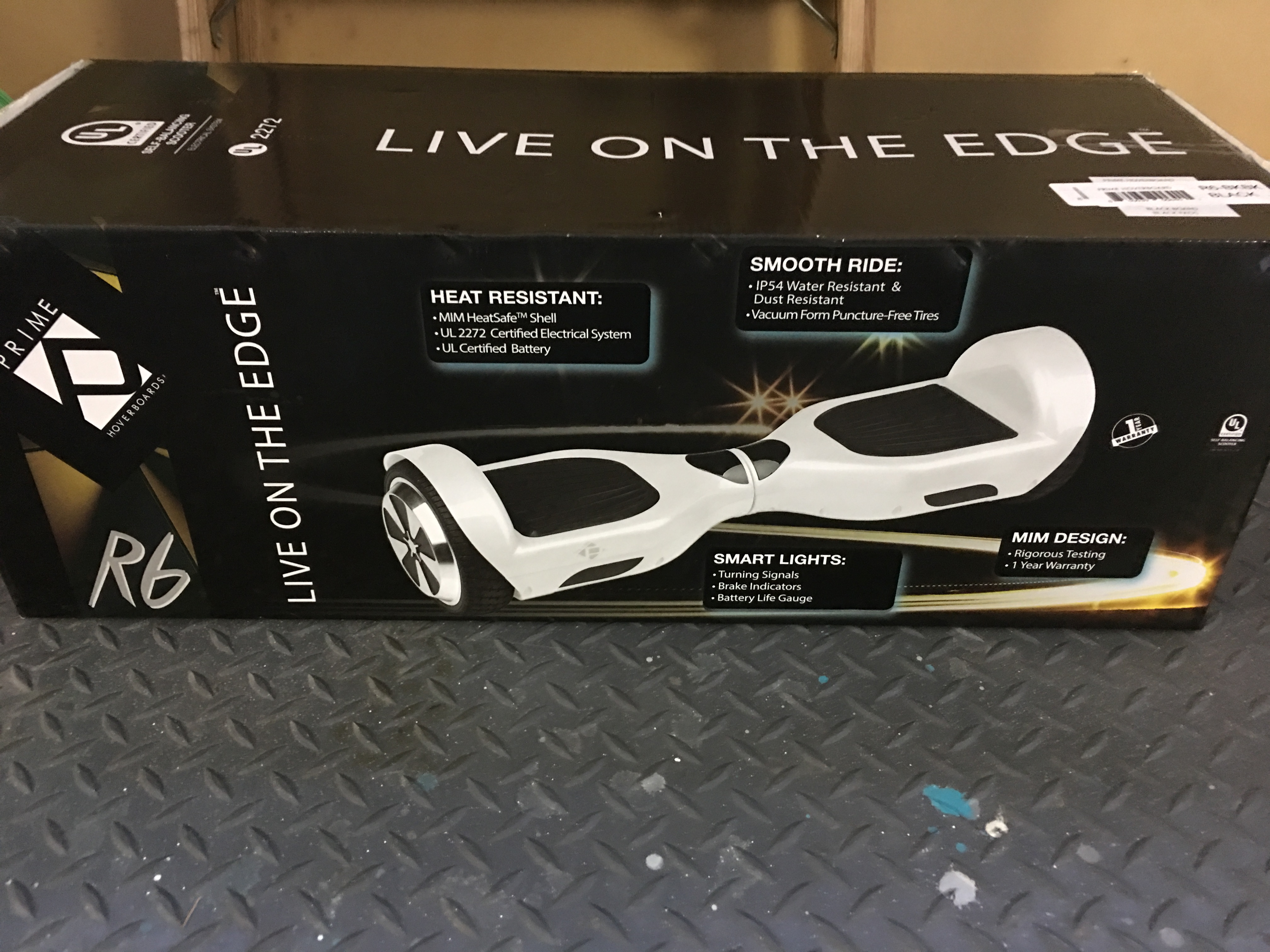



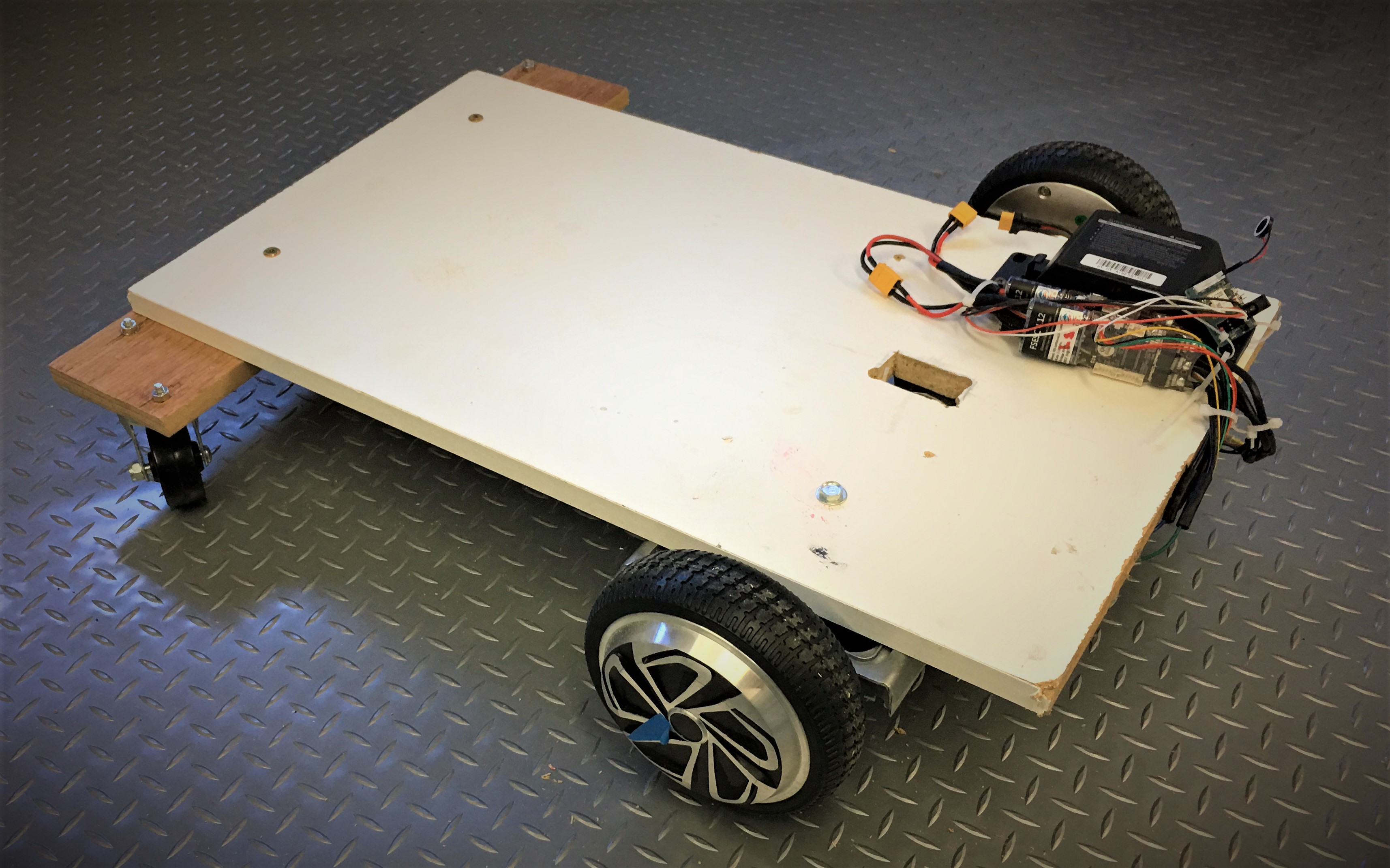
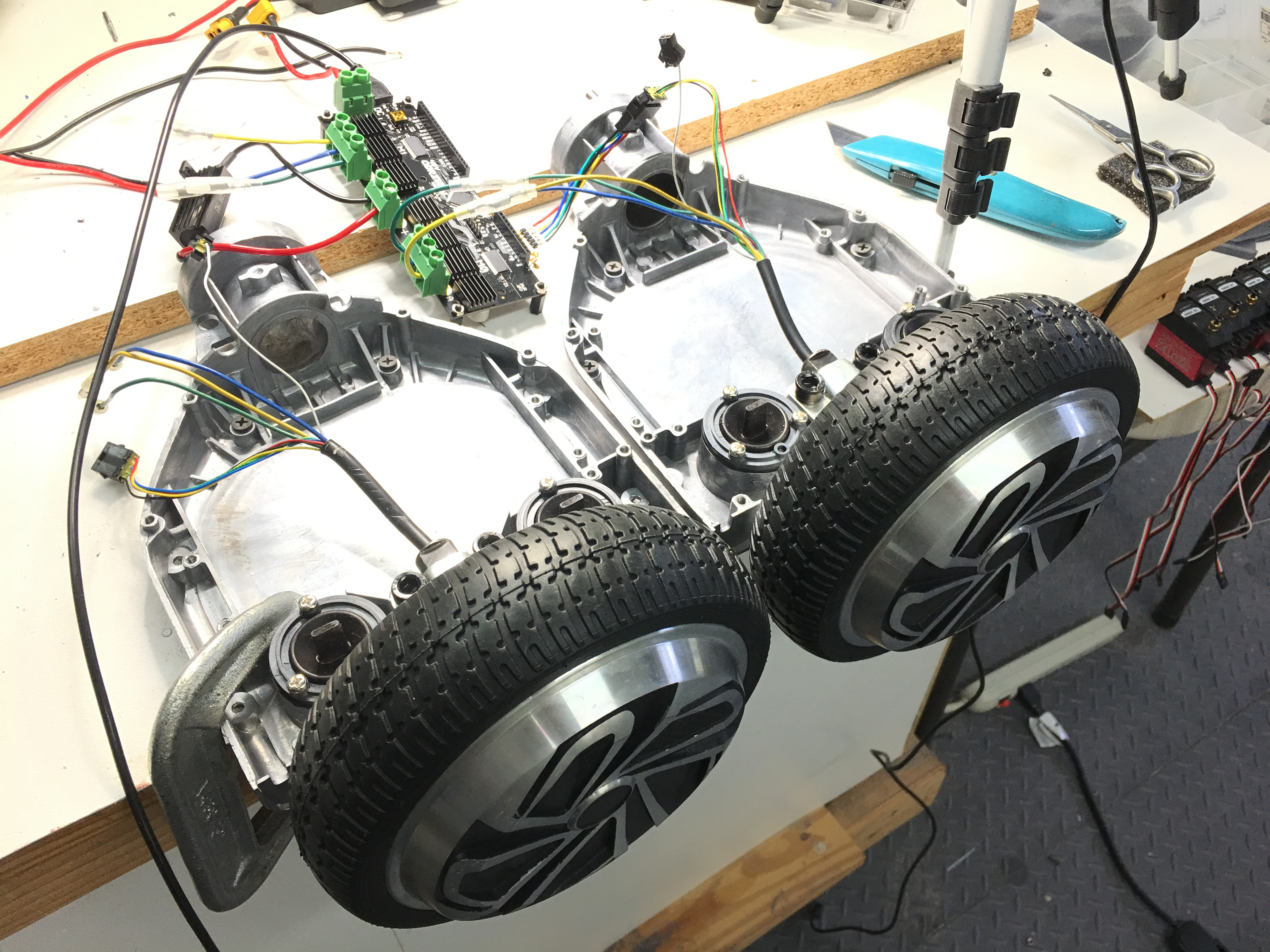
As promised I've started a separate thread on this. I had mentioned over at my Alan thread that I was thinking about using hoverboard motors for a rolling base for the full bodies of Alan and Alena. These motors are super cheap at about $25 a piece on ebay. They are 3 phase just like the 3 phase hobby motors for cars and planes. So there should be driver support for them.....well yes and kinda no.
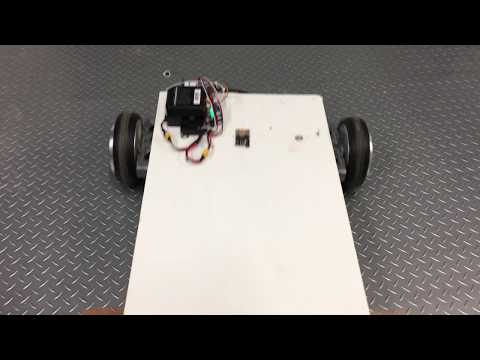
I have been watching a motor controller called the ODrive. Its all open source (hardware and software) and its a dual motor driver. I posted a video of these motors on a grocery cart driving around using hoverboard motors. So I bought an Odrive. I ended up buying a whole hoverboard so I could use the charger, battery and some of the connectors. This one came from Frys and cost $100. Its good upto 265 pounds.
Well now the bad. The ODrive is still a work in progress and not too intuitive. But they have a good write up on how to set them up with the hall effects encoders. All went well until I tried to save out to the board. Over and over again i could not get it to work right. I posted on the forums and got no reply back as to what the issue could be. So after days I began looking for another solution.
I found a great source in china that is making opensource stuff for skate boards. The got 2 single motor drivers. Each one has a standard servo connector and i can use two of them for mixed mode (tank mode). Each board costs $85. So its a bit more than the ODrive ($150 with shipping for the 48 volt ver.)
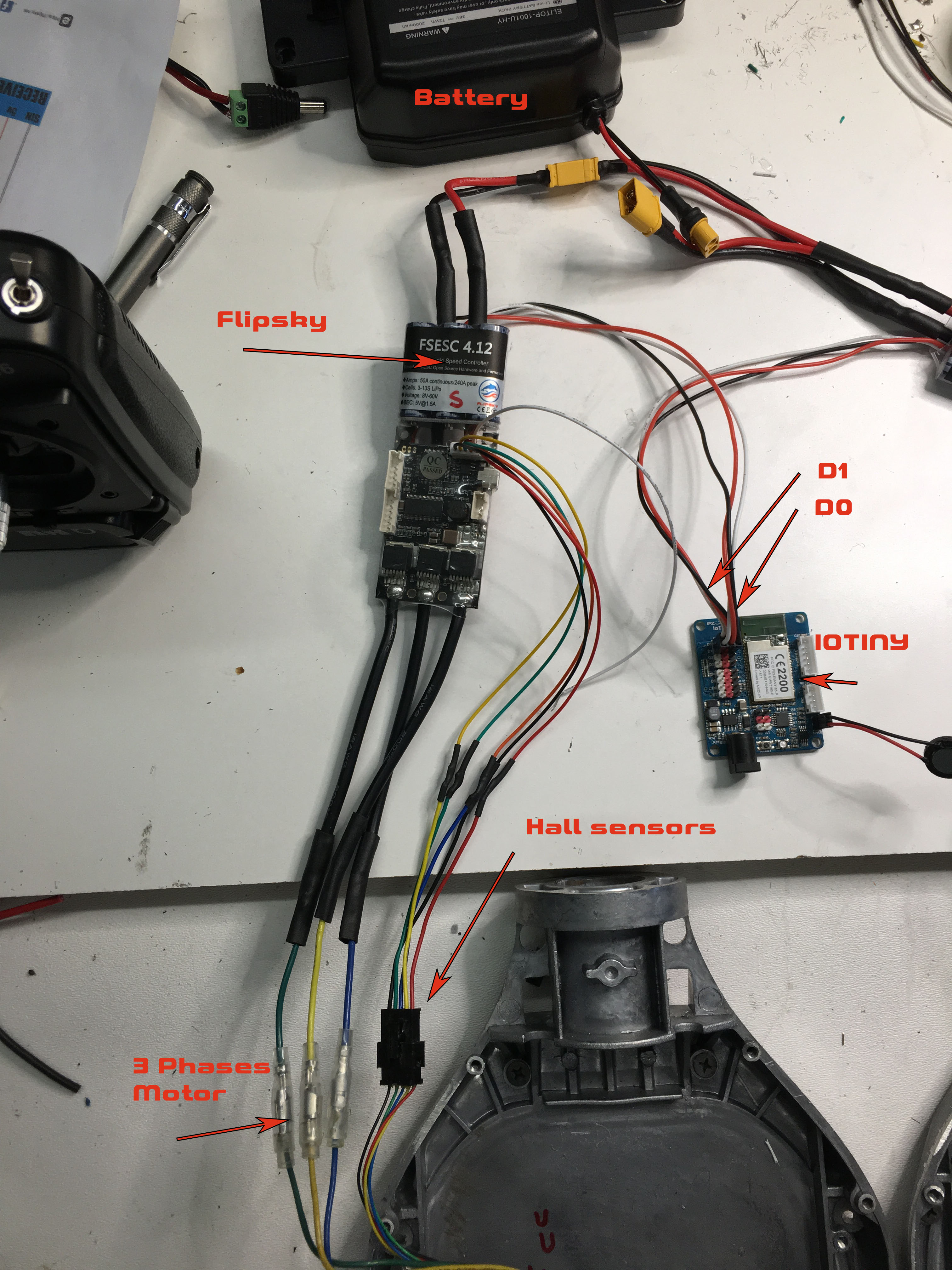
The name of the board is the FSESC 4.12 50A Based on VESC 4.12 from Flipsky ESC. And can be found here: Flipsky ESC
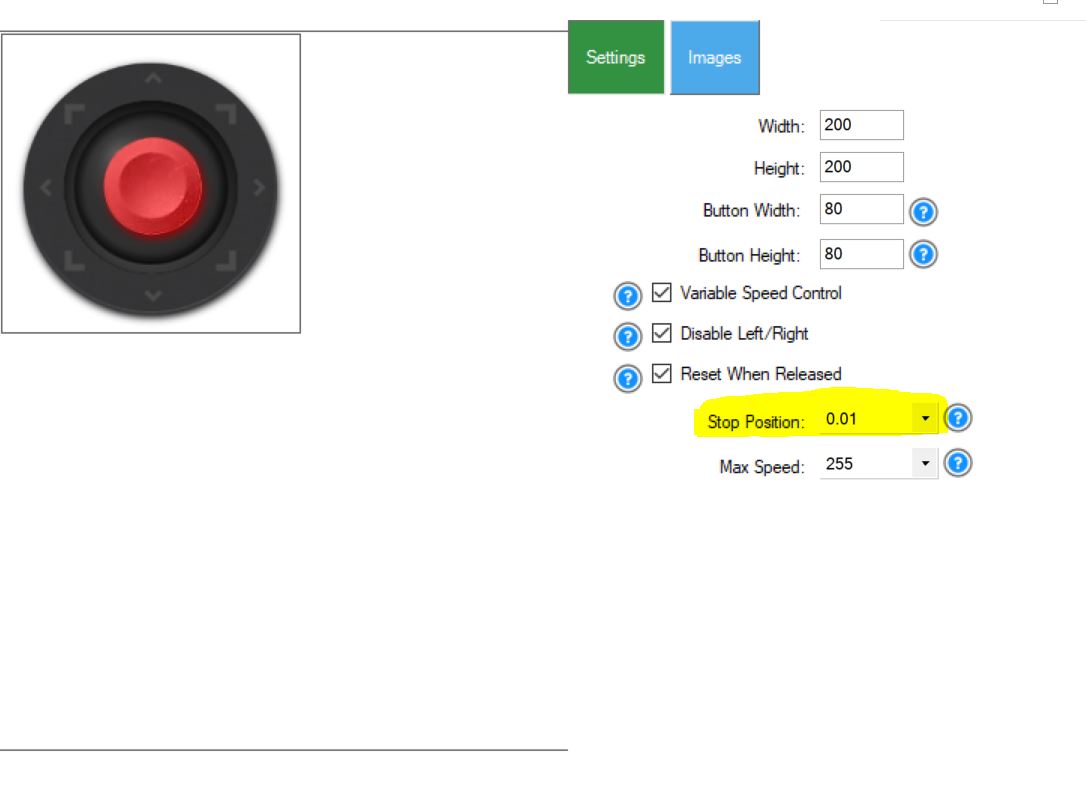
This controller can be completely programmed with their really great software..automatically figures out all the poles for the phases. Set up the frequency for the pwm and even have shut offs for voltage mins etc. They have a good youtube channel with vids on how to set up everything.
I have the video of the break down of the hoverboard done. As soon as I get these control boards I will be doing tests with the ezb to control them. Then I'll put together a final video and post here.
Discover more robots
Mickey666maus's ARC And Windows On Raspberry Pi 4

J's Rover My First Bot


No, I used your robot business email. I misplaced the aol.
( getahead)
...Got it.........
I noticed you have no feed to the IOTiny. When I tested my wiring the Tiny powered up thru the signal wiring from the Vesc. I am concerned about the 5vdc requirement to run additional inputs outputs or the camera. I assume I need to build a 5 vdc supply with a capacity available to run the add-ons. Do you agree? I didn't want to depend on the Vesc. My plan is to use the Tiny for any Nav system I build. Any ideas ?
Yeah I ran it off the vesc for my go cart project, but if you want to power the Tiny with full voltage like 7.4volts for other accessories like hobby servos etc you could use another battery or find a BEC that could drop the voltage from 36 v to 7.4v like the Castle BEC Pro. It’s pricey at $40 but I swear by them. Great products. You could then just use the signal and ground from the VESC’s.
I had originally planned to use a 17 ah 12 volt battery to run the whole robot power and a second battery of the same capacity for the drive motors. Since I have the 36 volt battery for the drive I am all set with the drive needs. Maybe I will buy 1 battery and 2 of the BEC, 1 for 7.4 volt and 1 for 5 volt for everything else. Do you remember the current ratings ?
You could get the Bec Pro ( rated 50v 20 amps I believe) and they sell smaller ones much cheaper you could use to drop down the voltage even further ( below 7.4v). They have a programmer you connect to your computer via usb and you can program the BEC voltage drop to anything you like.
Thanks, I'll check it out.
Work has become busy, so no setup or tests yet. I hope I get to play before I have to leave for Arizona.
Ahh good ole real life getting in the way of robotics...