




























































-635971125254815084.png)


-635971009768280111.jpg)





















-636393423097260688.jpg)




































-636337988865509663.jpg)























Hello all, I am getting back in the saddle making robots now that I am moved into my new home and settled into my new job as a technician maintaining the Fiber Optics network in Chattanooga TN.
IM BACK !

By jstarne1
— Last update
Discover more robots
Perry's Scratch
Gimbaled eyepod 'Scratch' with EZR camera, NeoPixel iris, servo X/Y gimbal and 3D-printed belt/pulley cross-mount for...

Ericez's Rori The Coffee Robot For Movie
DIY low-cost robots and tutorials: donated EZ-Board enabled 3D-printed Rori coffee robot for an Indonesian web series,...

DJ's DJ's Omnibot 2000
Omnibot 2000 showcases Synthiam ARC: Wii Remote control, Glyph vision recognition, Tablet PC touch control and materials...

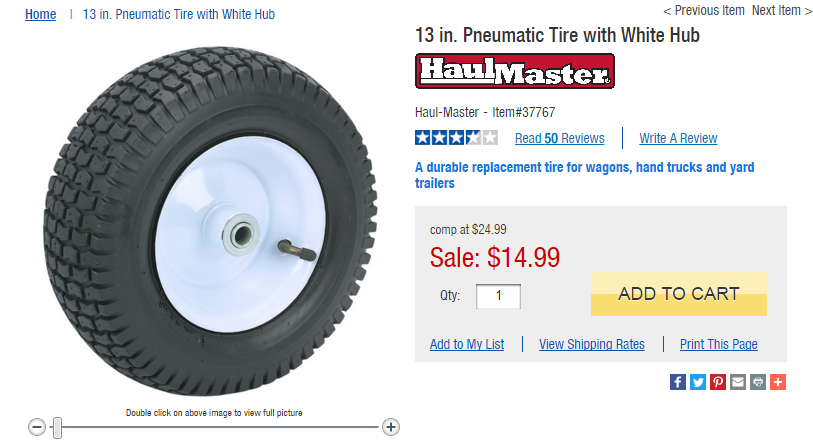
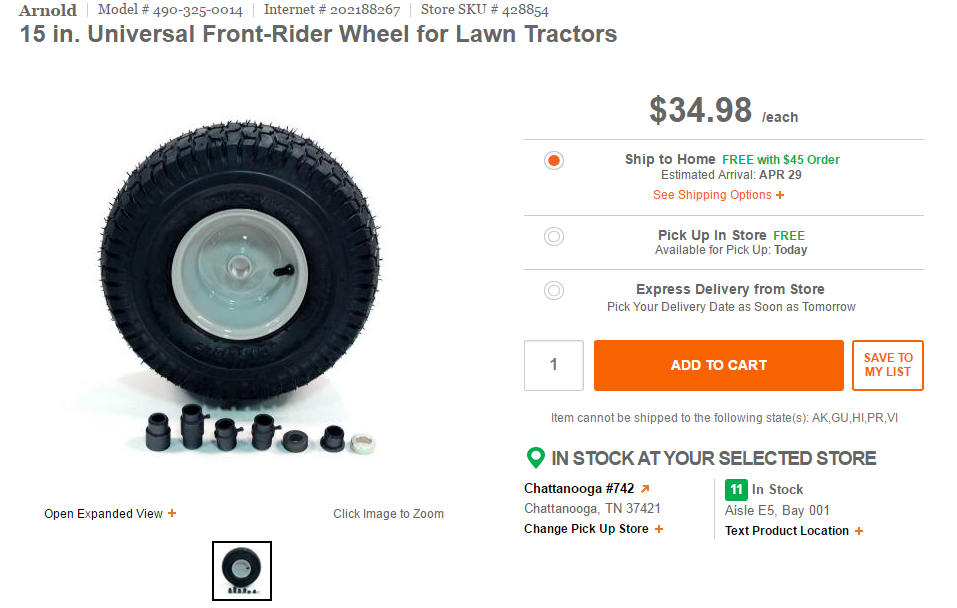
So for 5.99 I picked up outdoor tires with a slightly more aggressive tread. The rim is exactly the same in size. I was able to swap them easily. The only thing that I am concerned of is that the original tires were solid rubber which didn't have much grip. This frame has a couple spots under the motors that are only about a inch or less from the ground. I am considering making cuts to raise the clearance tommorow.
Ok after mounting the tires I took them to the gas station to air them up to 30 psi. They are nice and firm now and I believe these will perform better outside than the solid rubber tire.
Enjoying the updates!
Thanks DJ ! Oh FYI shortly after this project is running I am submitting it to The Home Depot/ Ryobi DIY competition, 2500 grand prize
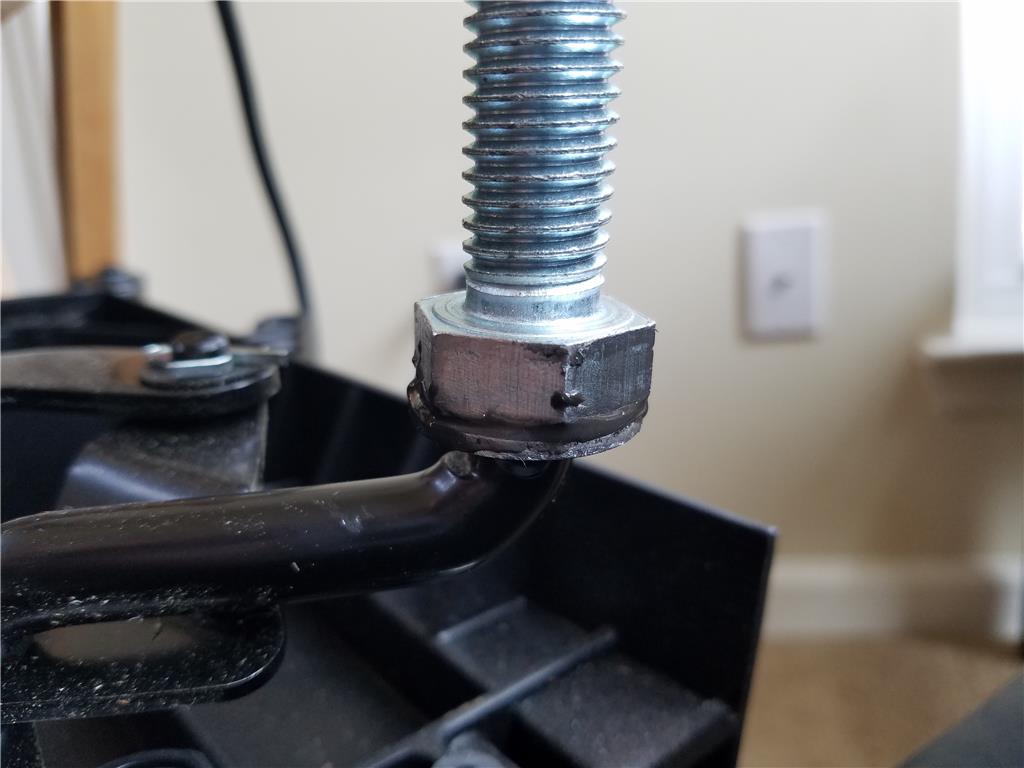
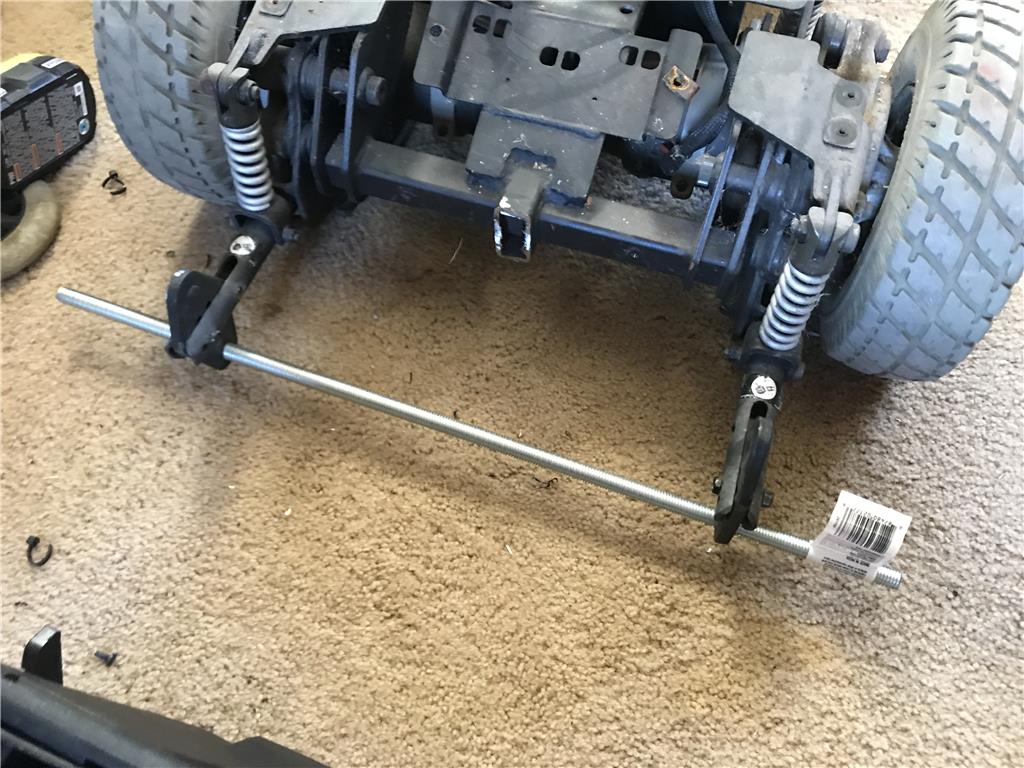
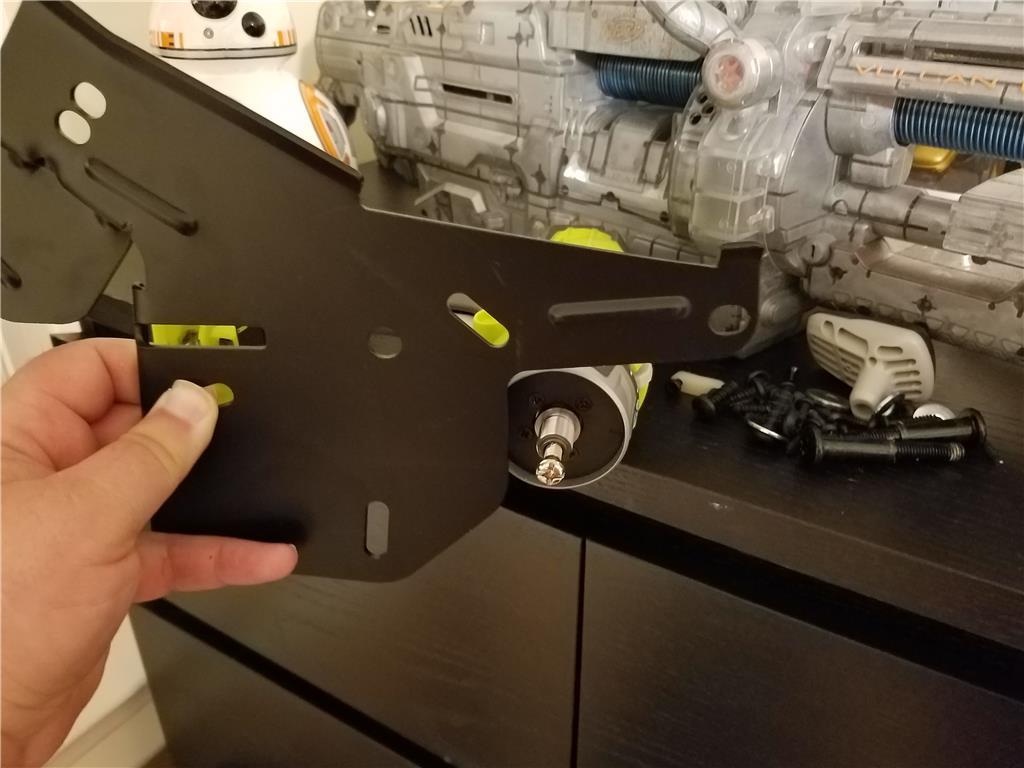
So I want some more wiggle room between the front of the Jazzy and the back of the mower. This is to allow room for shifting with terrain.
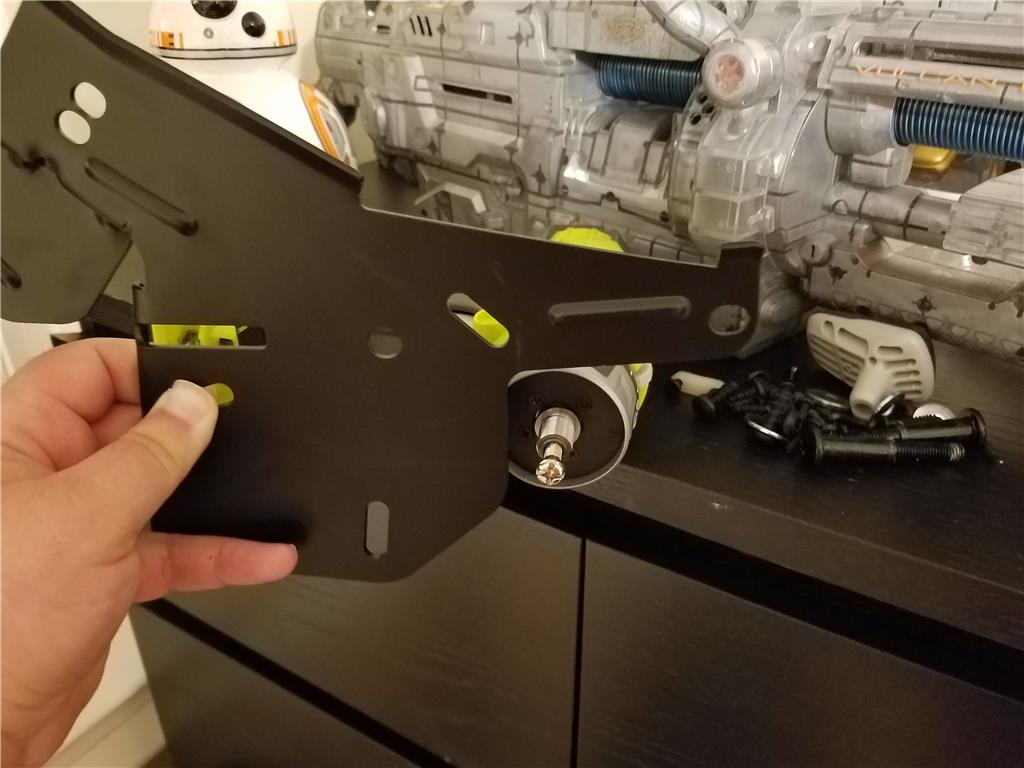
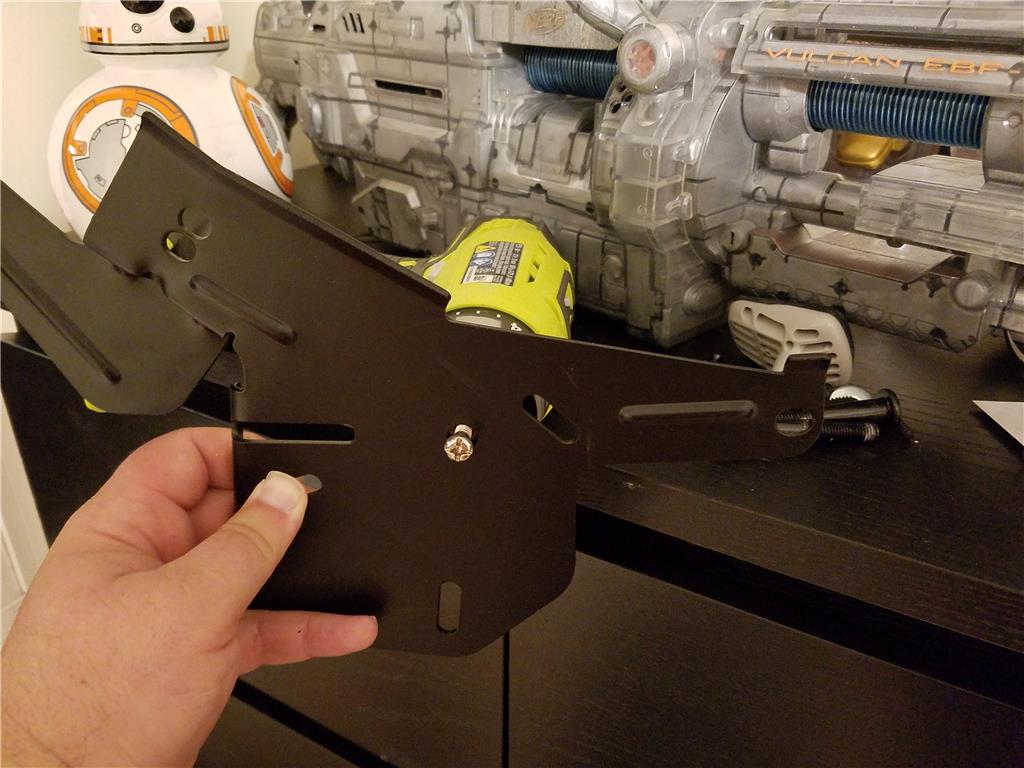
This is thick plastic , .25 inch I believe. It is he same thickness at the steel that was there for the anti tip wheels. I made them extra thick to compensate for being a plastic replacement over steel. I cannot flex this by hand. After dinner I will drill the holes and start bolting things together for an initial test in the driveway.
Ok it has been pouring ran from the tropical storm rolling through so I will do a quick test out on the back porch which is wet and slippery.
Video of first movement tests!
https://m.youtube.com/watch?v=qnpVartMoXc