




























































-635971125254815084.png)


-635971009768280111.jpg)





















-636393423097260688.jpg)




































-636337988865509663.jpg)























Hello all, I am getting back in the saddle making robots now that I am moved into my new home and settled into my new job as a technician maintaining the Fiber Optics network in Chattanooga TN.
IM BACK !

By jstarne1
— Last update
Discover more robots

Jeremie's Treat-O-Matic 2020
Convert a claw-style candy machine into a contactless Halloween dispenser with Atomic Pi, Arduino EZB, camera, PIR,...
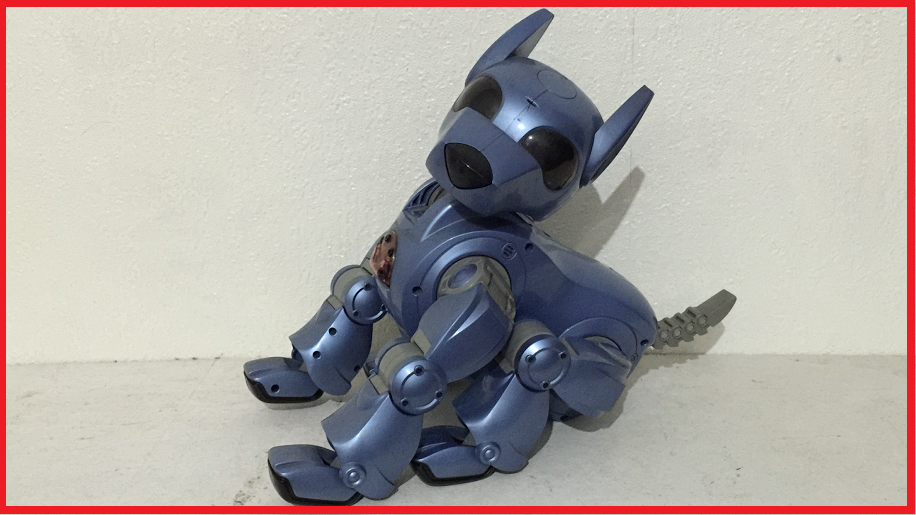
Steve's Eddie. The I-Cybie & Synthiam Mongrel Robot Dog
Convert an I-Cybie dog to EZ-Robot/EZ-B v4 with servos, camera and sensors, documented build and Synthiam ARC...
Cardboardhacker's 1/2 R2d2 Scratch Build
Build a compact R2-D2 using a cement pillar tube shell, ribbed papier-mache dome, and wooden inner frame to mount legs...

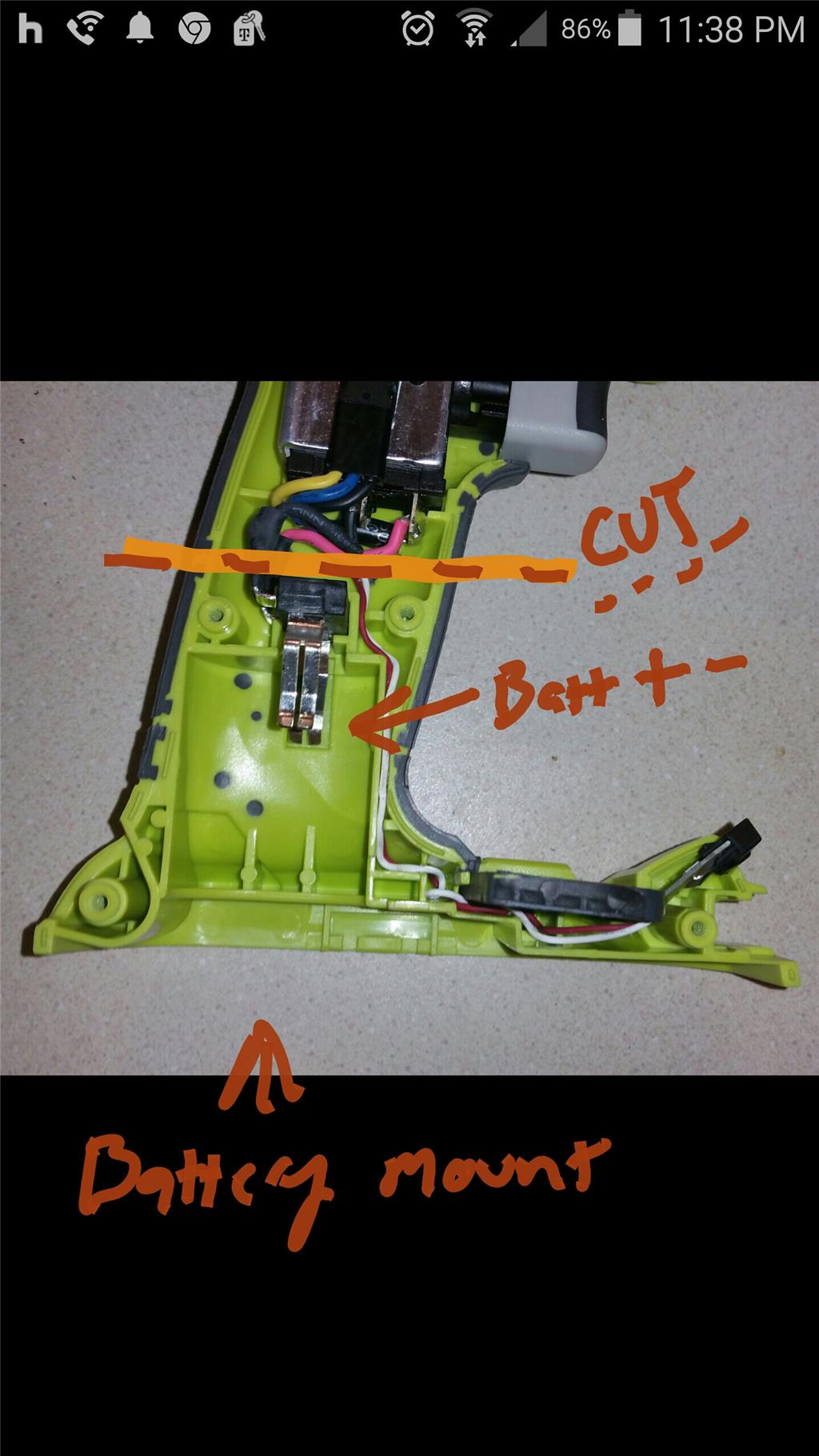
OK the above unit I purchased on ebay and hopefully will do what i WANT. I can eliminate multiple batteries by running 24 volts from the wheelchair base batteries and boosting it to 40 volts for the mower blade mower. It uses 6-8 amps according to the specs. This unit is capable of 15 amps and 20 amps if a fan is actively cooling the heatsink.
If this doesnt work I will just use the lithium ion 2.6 amp hour batteries that are made for the mower.
This absolutely must be a labor of love. How much $ do you figure you are into on this project so far?
Hmm well
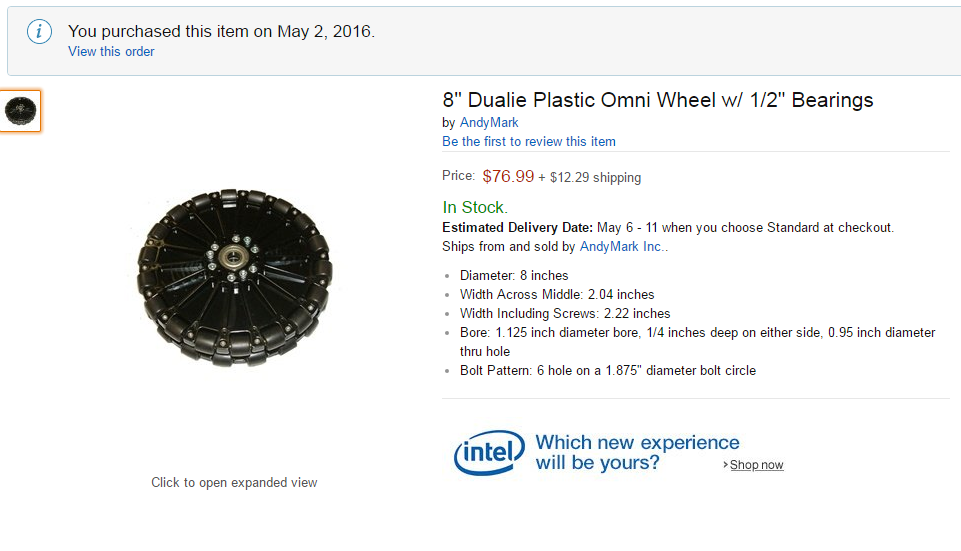
100 wheelchair base 149 for mower and batteries 40 x 2 for those drills Sabertooth 80 Two new U1 batteries 90 Misc wire 40 8 inch omniwheels 80 each
Yeah it is some money but my goal was the have a better robo mower that the 1000 dollar Worx Landroid for the same or less money.
I didn't mean anything negative. I was just curious, given all the odds and ends purchases what you thought you had in it. Building something like this myself has always been an interest. A lot of DIY remote control examples can be found around but not many robotic / autonomous ones.
Oh no , I dont take it negative. It is a learning process. Learning costs money !
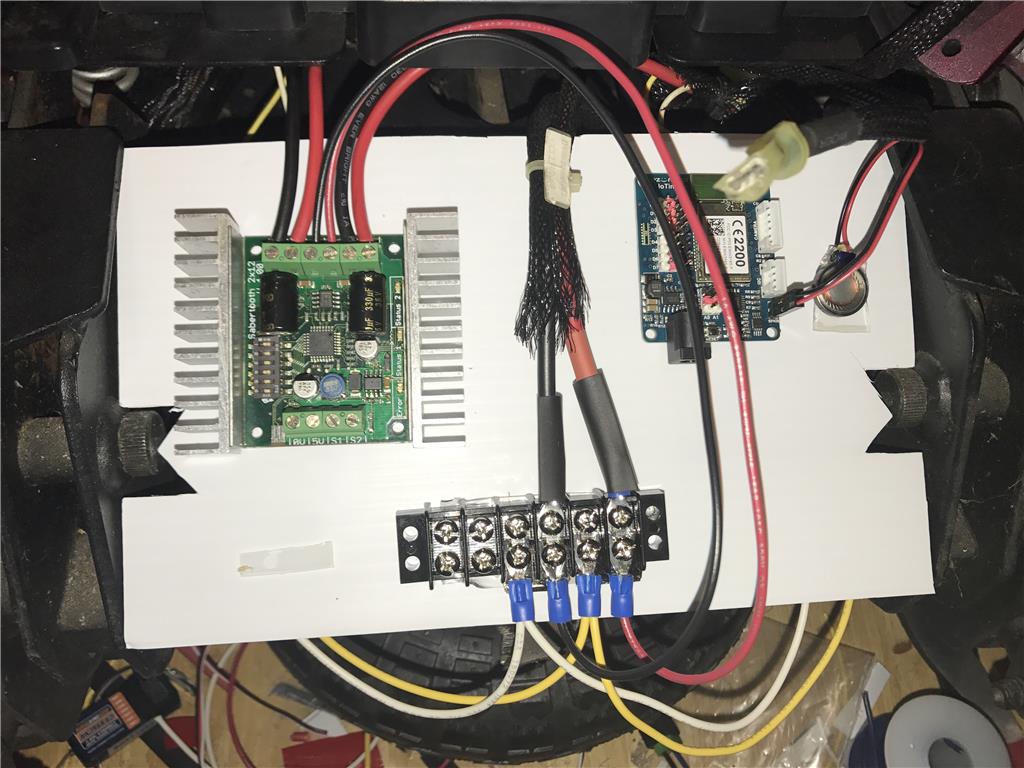
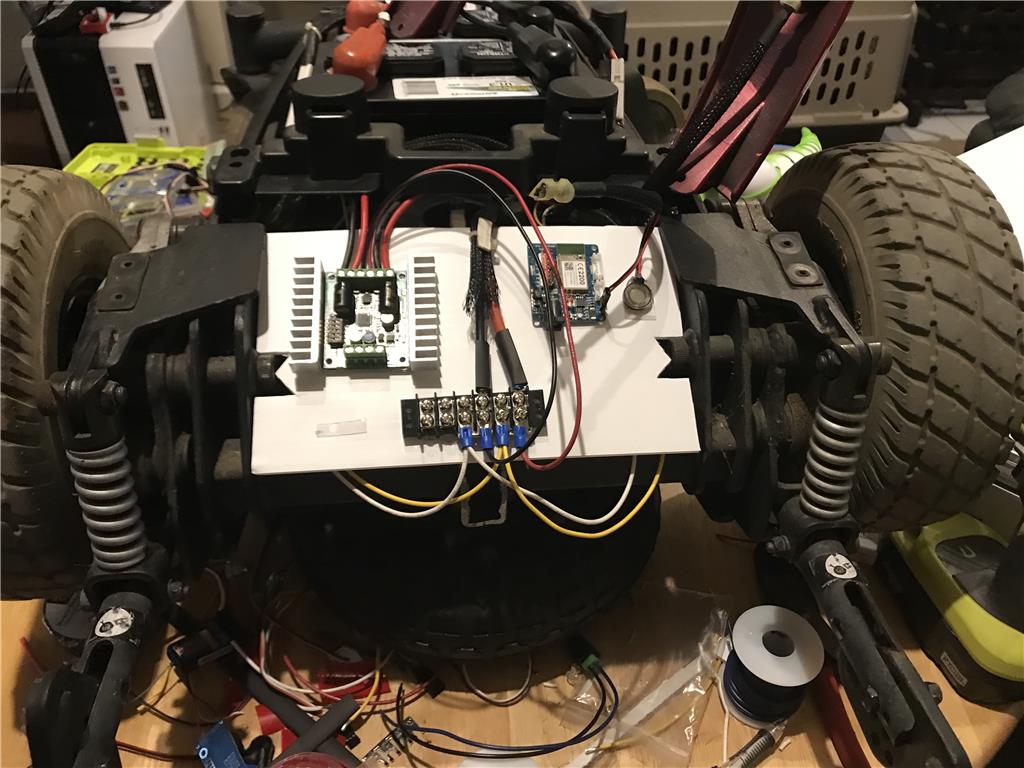
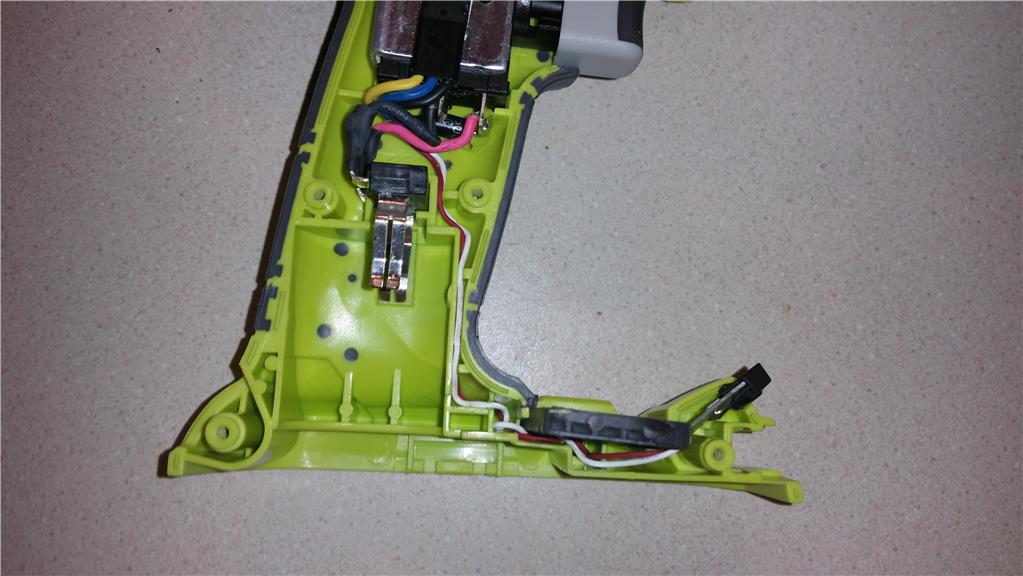
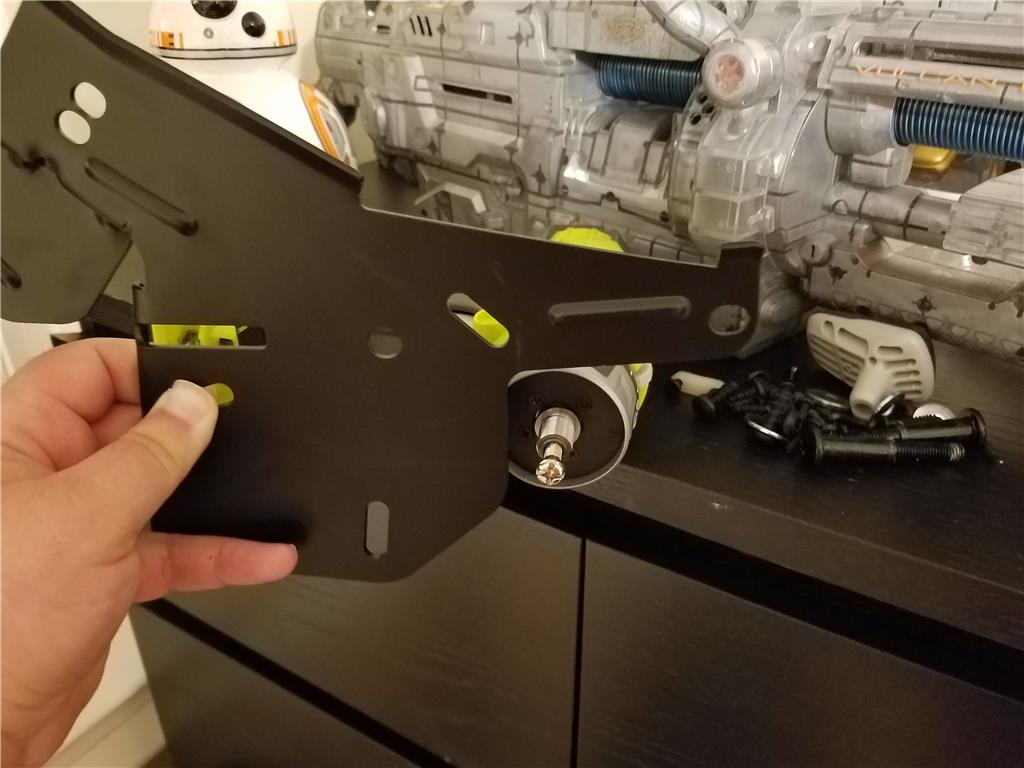
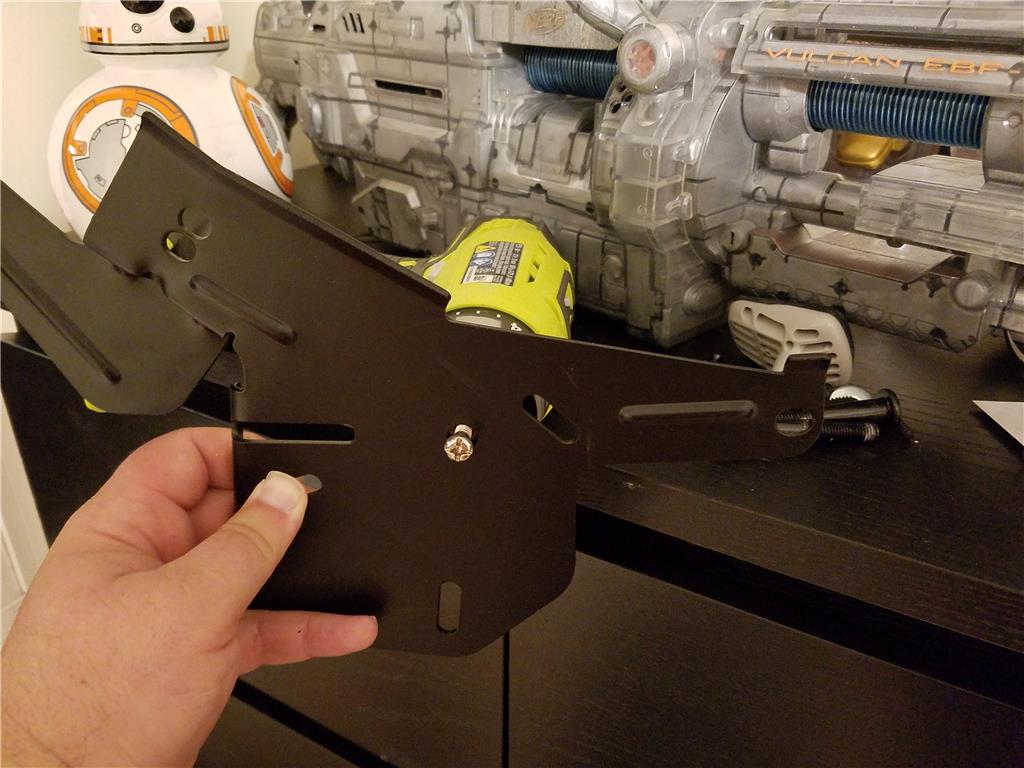
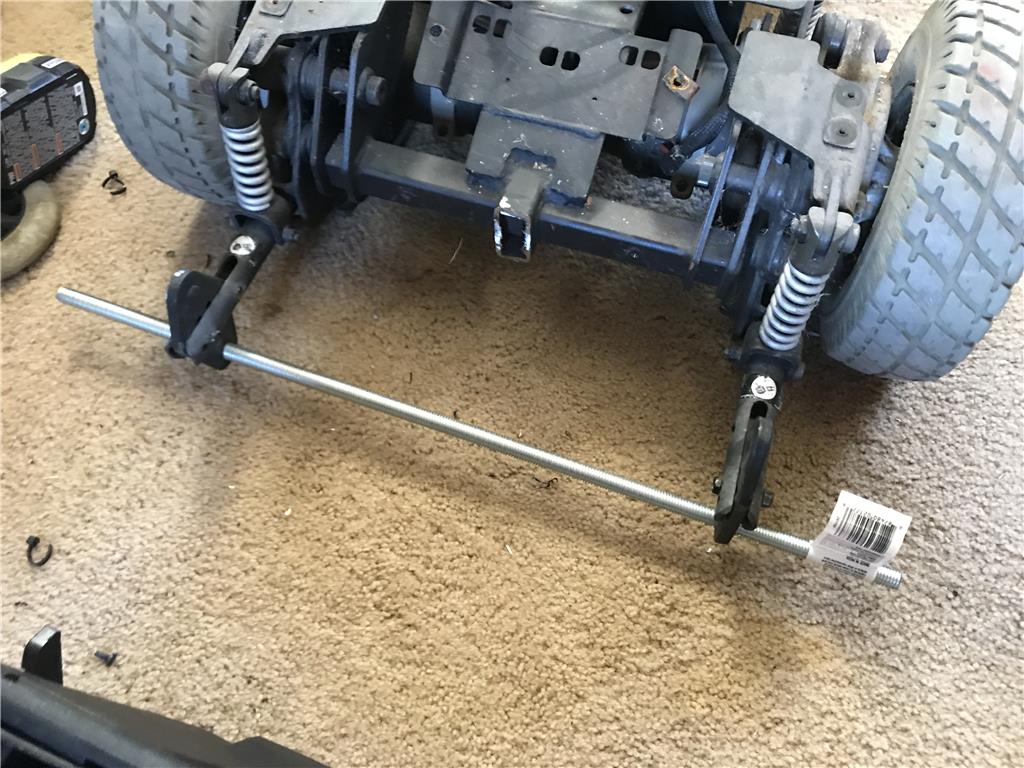
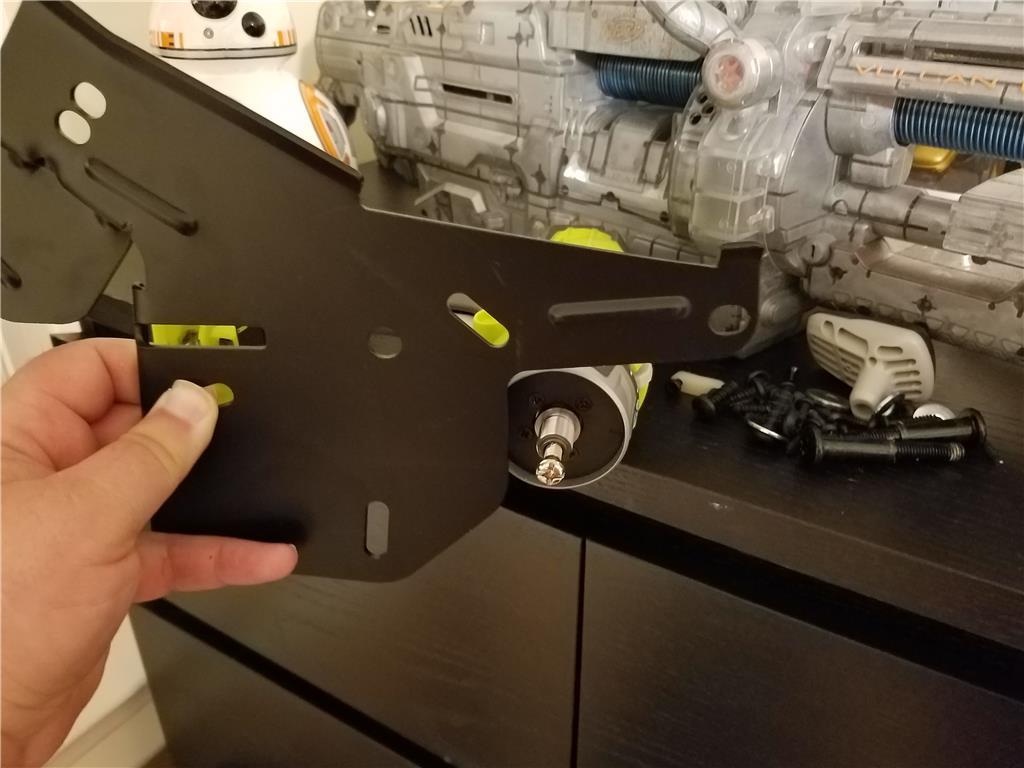
Ok so I stripped down the frame , cut off the footrest and removed the seat mount. I am using corrugated plastic to insulate the electronics from the frame. I wired the motor breaks to release on power up which means they will lock if I lose power.
Update, Grr upset at the sabertooth.
I have been trying to use the Sabertooth 2 x 12 simplified serial mode with Ezb tiny and keep having an issue. For example I can click the forward arrow and the wheels roll forward. Great! check. Then click reverse and one wheel turns forward.... what the heck? Similar strange issue when left or right. There are only 4 terminals, so there are 16 possible combinations. So I swapped them around and wrote down the configuration as I go to make sure I had no repeats. I just got more crazyness. So I went back to the original wiring that worked on the forward command and swapped the EZB for a RC Reciever and swapped from Serial 9600 to RC servo input mode and it worked great. To be specific is was mixed control where one servo control is forward/reverse and the other left/right turning. So the only think I can think of is to do a Movement Panel with servos. For now this will allow me to work out physical build.
Any help is great! I need a Movement Panel working with the RC mode since serial is giving me an issue, or if you can think of what the heck is going on with serial.
I don't know if this will help but.......
Are you using one sabertooth for both wheels, one motor for each wheel and attached to a different channel on this sabertooth? Looks like this from your picture. I have this setup for the DC elbow motors of my B9 robot's arms. However I'm not using a Movement Panel but using EZ scripting to send simple serial commands to each channel to move the motors independently. I found that if I send the two serial movement commands for each channel to the sabertooth to fast that the second command to engage the second motor on the second channel won't run. I found that placing a short sleep command between the two serial movement commands helped the second serial movement command to get through. Hope that makes since.
Also (I haven't tried or confirmed this), but if you have two sabertooth's try moving the second motor to the other sabertooth. I have a feeling that one single sabertooth can't process the the serial commands as fast at the EZB can send them and causes the second command to get flooded out. If you split the motors to two different sabertooths then each one can process the command on it's own and as quickly as it's received.
Hope this all makes sense and helps.