I found this robot on Thingiverse; www.thingiverse.com/thing:2471044 and thought it would be a fun project. Check it out they've really created a great robot. Printing it takes about 70 hrs. and then you need to go shopping for baking supplies (Raspberry Pi's and such). So I thought why not make it run with EZ-Robot hardware (most people here have lots of that) and software. I modified the camera holder to accept an EZ-Robot camera and the arms to accept EZ-Robot HDD servo horns and connected everything to an IoTiny. Building it was pretty straight forward. Programing it to solve the cube was another matter, so I got ahold of forum member ptp and asked if he would be interested in helping out and he was. He doesn't have a 3D printer however so I built him the robot and sent it to him. He has been busy working on an EZ-Robot plug-in to solve the cube as well as calibrate the arms and grippers. We are hoping to have the Plug-in ready to share by the end of the month, so start printing. This would be a fun project for both kids and adults. We'll keep you posted.
Discover more robots
Vgosine's Robotic Arm

Luis's Multiple Sensors On One Uart


@Andy,
The Inmoov project is almost a lifetime project, I still have some questions:
I know this is a challenging project. Way over my head if I had tried to conceive it. However I looked at your coding to try to learn something. You make it look so easy. What a wonderful process.
@Dave,
Thanks for the words.
The idea is to make others challenges more EZ
I believe your are talking about the EZ-script:
i used the KISS principle (https://en.wikipedia.org/wiki/KISS_principle)
The $CubeVisionSequenceCounter is incremented every time a complete different sequence is found.
So the idea is to monitor that variable and do something after.
@DJ: I couldn't find a blocky equivalent for WaitForChange
I always tell my friends Robots is more software than hardware.
There are so many sensors, but what makes them unique is the software (Firmware , API, Framework or Program).
One good example is the 3d camera:
All of them have more or less the same sensors, but... only 1 st generation and Microsoft Kinect V2 handles skeleton tracking.
So the software is the real thing.
KISS, yes. This's a concept I struggle with. Most of the time I overbuild and over think. It always works out better when I later reverse engineer and remove all the complexity I worked so hard implementing. LOL eek
EZ Robot and the rest of us are fortunate the group of guys like you have chosen to stick around here and show us amateurs the path.
Respect.
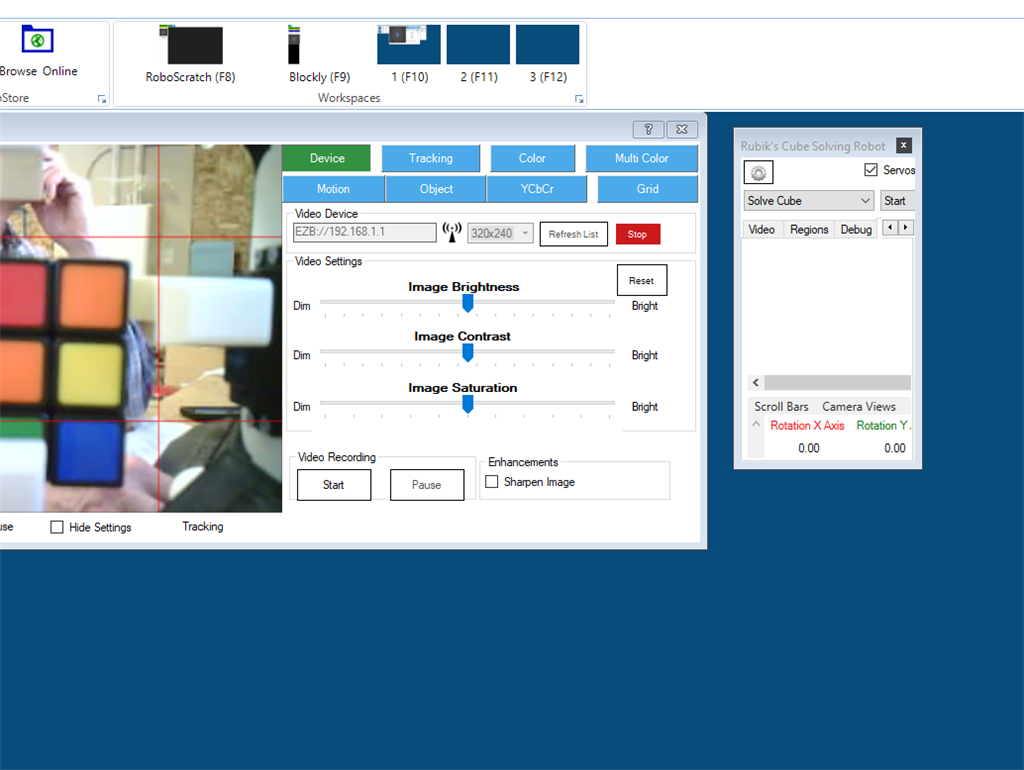
Use either one of these, and they can include white. They have a histogram option, which may provide more consistency in varying lighting conditions.
Voila, here you go. Once you create a profile for each color and give them a name, this will sort them for you...
One last thing, you can also do this entirely inside the plugin, rather than depending on people creating Color Profiles. If you'd like to see how, let me know and i can show you the EZ_B.CameraDetection namespace.
Simply do something like this...