




In an earlier thread Doombot had mentioned he may put a ping sensor on his robotic claw to sense and pick up objects automatically... Well, I had a moment of inspiration so I thought I would try and knock up something... So check it out... a simple prototype of my version of object detecting robotic claw...
By Dunning-Kruger
— Last update
Discover more robots

Ericez's Droid For Theater Robot Contest
Build low-cost BB-8 and R2-D2 Star Wars robots from PVC water pipe and control them using an EZ-Board.

Tmesserschmidt's Meet Melvis: My Ultra Humanoid Robot
Melvis humanoid uses EZB for everything, Elvis-faced head, 3D-printed InMoov arms, planned Segway mobility and future...
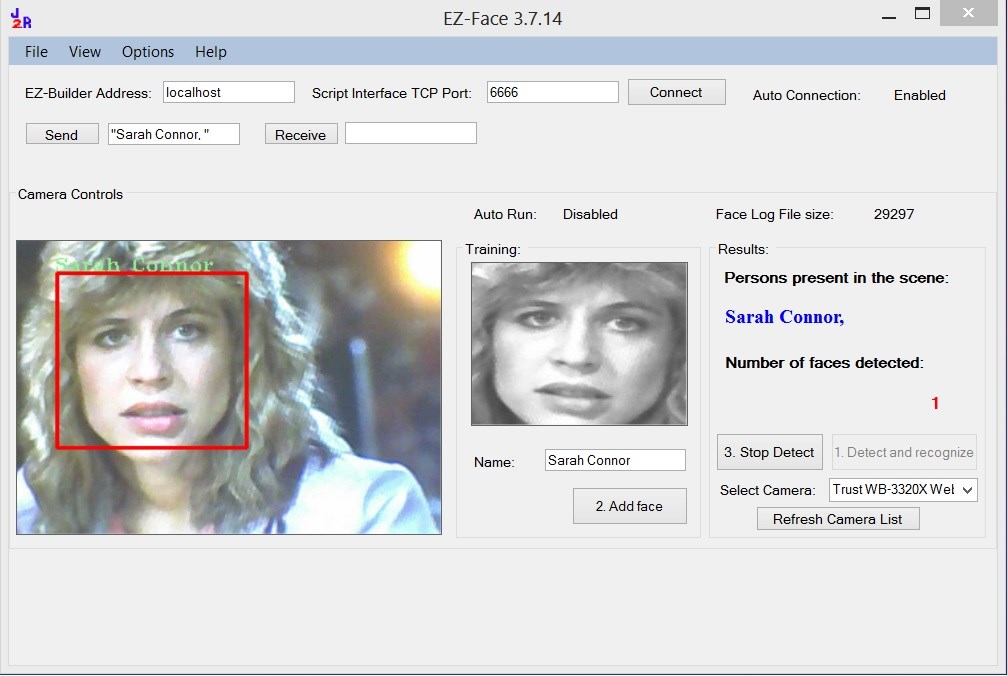
Justinratliff's Ez-Face
EZ-Face: standalone C# app using EmguCV for multi-face recognition with trainable names; integrates with Synthiam ARC...

Need to rebuild your youtube video, right now it's marked private
Not sure how that happened... does it work now?
Nice, thanks!
Hey Richard thanks for the vid! and its kinda "crab-like" with the ping sensor eyes
and its kinda "crab-like" with the ping sensor eyes
Thanks for the mention bud! However it's not an original idea of mine. I blame the roomba beerbot for the inspiration! Mine is located underneath the claw though, so it is out of sight....
Thanks guys... I agree the ping is either too big or in the wrong place... Going to tinker more and see if I can't make it a more elegant design...
Nice video. I like the idea of putting an IR sensor in place of the ping sensor also. I also would suggest maybe usiing pressure sensors in the claws to aid in determiningamout of claw pressure on the softer obects.
Pressure switch is a good idea... I am working to integrate this (and more) into my current project.... I will update as I progress... thanks for the comments....