




In an earlier thread Doombot had mentioned he may put a ping sensor on his robotic claw to sense and pick up objects automatically... Well, I had a moment of inspiration so I thought I would try and knock up something... So check it out... a simple prototype of my version of object detecting robotic claw...
By Dunning-Kruger
— Last update
Discover more robots

Luis's Lcd Display For Ezb4 - Using Arduino Mini As...
Connect a 16x2 LCD to EZB4 via Arduino: wiring, Arduino sketch and EZ-Builder UART script to display text, control...

Ezang's Life Is Like A Tight Rope, Do You Agree With This?
Tight rope robot squeaking by, enjoying performance once again
Mitzeljk's Meet Modi
Modi mobile voice-recognition robot controls a computer via EZ-B scripting and H-Bridge, built on an RC car base from...

Below is the 3 fingered hand of the EZ:1 robot, note the micro (digital) optical ranger in the center, this triggers when anyone puts an object in front of the hand.
This version senses anything that comes in within 100mm of the hand, they are made by Sharp and are quite low cost at around 5 bucks each.
This is a really good idea, with great progress so far. Clawed robots always struggle with knowing how and when they have actually grabbed the item they were designed to grab. Excited to see how your design progresses
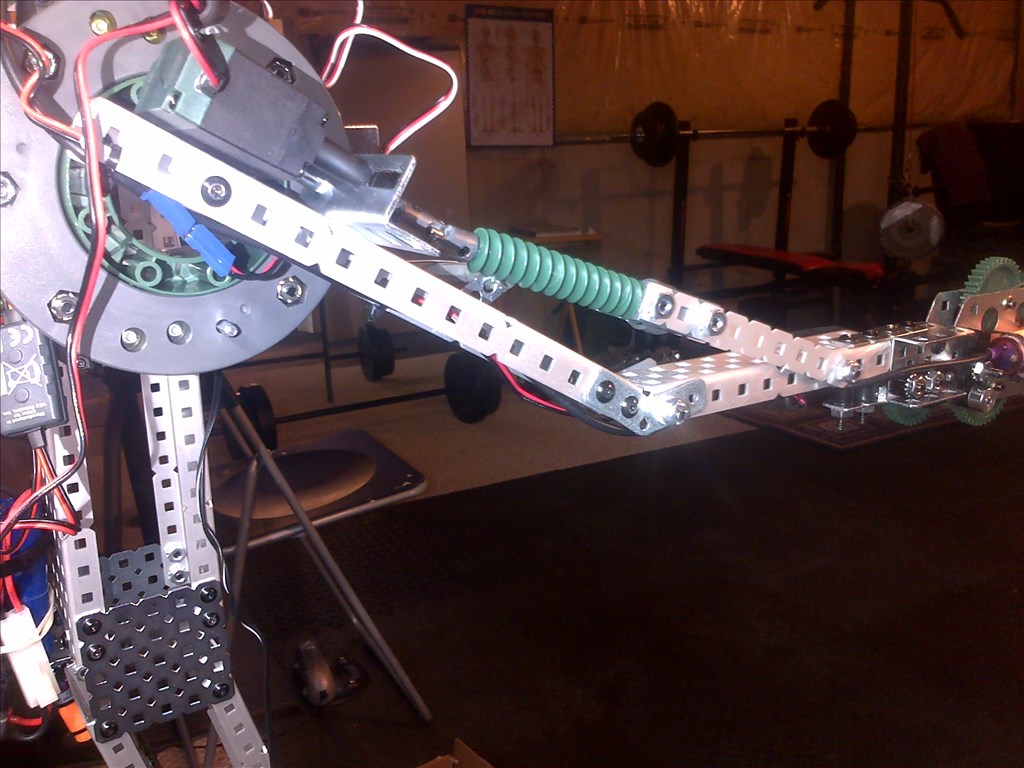
This is what the claw has evolved into....
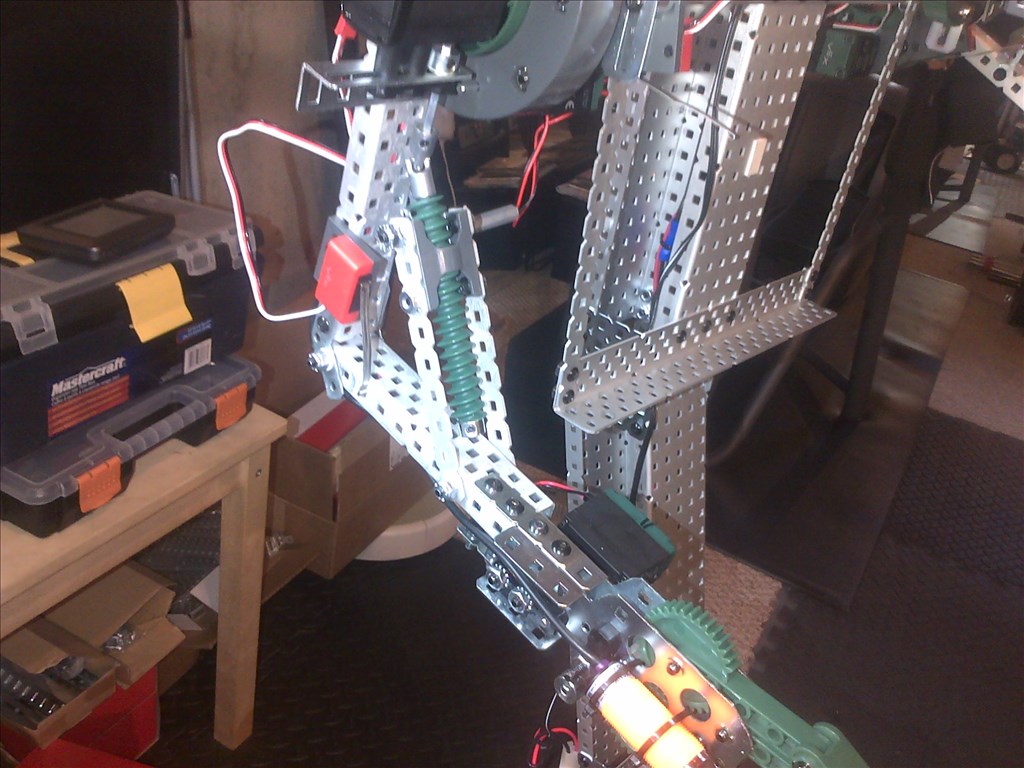
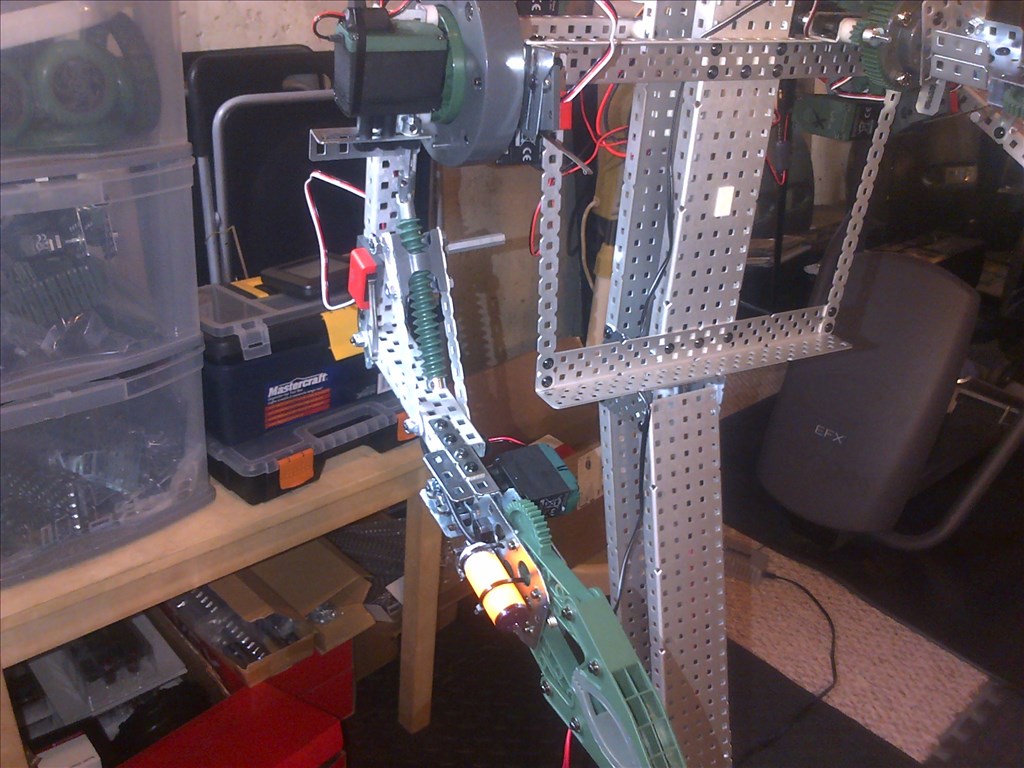
Richard R , Claw actions looking good. Triggers respond well. What hardware are you using on shoulder and claw? Very smooth. I like the aluminum framework. What kind of IRobot platform is it built on? Looks like a tall robot. I think the sneak preview turned into a great build. Thanks for sharing. Steve S
Thanks Steve... sadly and even with the aluminum it was too heavy for the create base so I had to switch to a Zagros robot base I had. Still a work in progress and a crap load more programming is still needed. The shoulders are vex turntables with two vex 393 motors per shoulder. The arms are strong enough to easily lift a full bottle of beer without any idle back drive after lift. I am now using IR detectors in the claws to trigger closing when objects are near... I might work on an elbow joint if I can figure out how to do it without adding too much weight to the arm. Needs a animated head now too, any suggestions?
@Richard, here is a link to the Sharp optical ranger that I use on my robots claws etc.
www.pololu.com/product/1134
If you buy just the sensor alone its under 4 bucks, they are very small and work well.
www.pololu.com/product/1135
Hope this is of help.
Thanks Tony, it does help... I am going to grab some today...
@Richard, I modify the Sharp Rangers tiny PCB so the red LED is visible from the front and I wire in the "enable pin" (blue wire) to a 4pin header connector, here is a photo of the mods.