



Discover more robots

Jstarne1's Meet Dusty , Modded Omnibot 4 Home Security Cam,...
Dusty omnibot torso: vacuum and silent sweep modes, germicidal bulbs, multi-stage carbon/foam filters, pan-tilt camera,...

R2D2's Robot Building
Build a 2.5-3 kg butler robot with ez-b: 15kg continuous wheel servos, 2-axis head, arm servos, 3 Ping + Sharp IR...
Ericez's New Friend For Jd, Lita My Humanoid Robot Made From...
Building a DIY humanoid JD robot with ez developer using PVC pipes and scrap parts while awaiting gearbox replacement on...

This video shows Eve's arm components from the shoulder - it does not show the shoulder pan motor that is braced to the spine within the torso or any of the wiring and connectors that still require manufacture.
Each arm consists of: 23 3D printed components, 4 brass 12 toothed motor spline cogs, 2 brass 12 toothed custom centralising shaft cogs, 4 M2.5 motor shaft screws, 2 low profile pan M3 25mm centralising screws, 48 M3 25mm securing screws, 19 M3 8mm securing screws, 12 6mm actobotics mounting screws, 8 10.5mm actobotics mounting screws, 2 51107 35x52x12 thrust ball bearings, 2 90 degree Quad Hub Mount Hub C connectors, 1 3 inch actobotics channel, 1 90 degree pattern mount actobotics connector, 1 Hitec 5685MH servo motor, 2 Hitec 7950TH servo motors with screw mounts, 1 Hitec 7950TH servo motor without screw mounts, 2 pre-assembled Hitec CM-9380TH-180 servo Gearboxes.
That's a total of 148 components per arm (without wiring, connectors, springs or any fingers). I would like to get that number down to 3 when my new click together servo modules are developed - shoulder, elbow and hand.
I would like to add fingers and related motors, a slot system to remove arms quickly for clothing changes, and have yet to manufacture proper wiring solutions to keep things neat but the components are coming for prototyping. I will also be adding anti gravity torsion springs in a few of the motor systems. Of course all 3d printed plastic parts will be fabricated properly using another method if 3D printers do not substantially improve before these robots go to market. Also, the screw threads are currently weakly biting into the PLA plastic holes, and are often not 100% secure, so it would be nice to modify all holes to incorporate nuts, or better still, replace all plastic with aluminum die casts if possible. Everything works quite well except for the gravity issues on these weak hobby servos. I hope support springs will completely solve the problem of jitter, buzz and servos catching fire. Also, I need to develop a much faster method of calibrating motors when connected to rotating parts so that the arms work just like a human arm without the possibility of inaccurate insertion. Unfortunately, a design mechanics company has ripped me off and stolen my life savings and inheritance after I paid them upfront milestones to build new series-linked servos from scratch. I am currently in the process of retrieving that money in court, so hopefully I will be able to get back to creating click together series servos with a lot more power, rotation arc, slip disc wiring and holding brakes this year after I win my case.
In the past 5 minutes I have compared the 6/32 zinc plated screws required for actobotics components with the M3 stainless machine screws I have been using. The M3 screws are 1.5mm too narrow to securely hold the actobotics parts in place but the 6/32 screws are a good enough size for my plastic parts. Also, the zinc plating makes the screws magnetic, which would have saved me a lot of frustration with the thousands of screws I have used. Stainless does not stop the screw heads from stripping so there is no advantage to it unless I am worried about future rust - but the zinc takes care of that. The screws that come with actobotics also have much coarser threads meaning that a screw that would normally take ten seconds to remove can now come out in only 3 seconds. I think I'll replace all my screws with coarse threaded zinc plated 6/32 screws. The coarser, wider threads also seem to prevent pulling out throught widened holes in the plastic, and thus seem to lock in tighter without risk of slipping out. They seem easy enough to source...actually, the past hour has proven to me that they only come from America where they cost at least $80 with several weeks wait for delivery instead of $20 with a 2 day wait. I'll need to find a middle ground...the only middle ground is M3.5 screws which are also very rare. The problem with screw heads is that they often tear apart, especially philips heads which were actually designed to do so to protect the wrist while drilling. So the deeper the socket, the less likely it will shred. Hex screws I've used in the past have shredded even more easily than philips heads. But when weighing up the factors of magnetism, coarse threads for added grip, total compatibility for maintenance, less likelihood of shredding the socket, low profile, insertion speed and availability, the 6/32 screws from servo city are actually reasonably priced. The profile is pretty high, but they are very shiny and look absolutely part of a finished market product. The sockets are more durable as well. I've only twisted the heads off twice. Pretty good. This means that I may buy all 6/32 screws from there until I find a better idea. I think the high profile will not get in the way anywhere, and the diameter seems to be compatible with all my connections.
Beautiful work and wonderful idea. Keep at it.
One thought that I have that may help with the gravity and weight issue for the servos... the springs are a good idea, but also, (it is late and my thoughts are a bit fuzzy, but it is a thought) possibly coming up with some kind of pulley system within the arm and chest areas to help decrease the pull on the servo as it repositions the arms and such. Also the springs would helping in holding positions.
That only comes to mind because of thinking how much easier it is for a person to hoist heavier loads and hold for longer periods of time depending on pulley configurations.
I guess using a system of gears with the right gear ratios could achieve similar results, possibly even better holds for longer periods of time.
Caught myself about to start rambling on, so I will stop here. But possibly something to get some creative thoughts going to help out.
Couldn't help myself, did some looking to come up with some ideas of how a gear setup could possibly help you out, and thinking to myself, a way of switching gears within a setup to be beneficial in areas of speed in repositioning as needed but being able to shift to being able to hold weight for periods to create less stress on the servos while in the holding position, I came across this link, which I thought may be worth sharing with you to possibly help with some creative thinking for your needs.
https://spectrum.ieee.org/geek-life/hands-on/diy-electronic-bicycle-derailleur
Thanks for your ideas on holding brakes, ShaunHTC. We all need holding brakes. Please join the discussion here:
https://synthiam.com/Community/Questions/10056
Just woke up and hit me.... continue basically what you doing, but add an extra gear or two for the servos to drive for your movements... add in a controllable lever that can catch a tooth or two on the added gears that in effect catch/lock the gears into their position, then relax the servo that controls the movements... i am sketching the idea down as well... will share that with you today at some point... need to get ready for a some meetings this morning.
Will use the link and join in on that discussion when I return.
Hi @Zxen,
Watching your video reminds me of a old twilight Zone episode. Love it.
I saw you were wanting to mount your camera in the head to follow moment. If I understood this right? If so you may want to consider mounting on a fixed part of the robot that don't move. DJ says you get better tracking results if the camera isn't moving with the servo moving the following part. You could then mount it in a peace of jewelry or something to hide it.
I also heard you say you were having trouble with those expensive servos heating yp and burning. I also am using the HS-7950TH servo in one section of my B9's arm. it's lifting about 3 pounds at the length of about 1 foot. I also lost a few these servos. Hard on the wallet and the ego when it happens. I had to come up with a solution to this and also the irritating whine they produced when holding the load. I did to things. Like you I mounted them into one of ServoCity's gearbox but with a 7 to 1 gear ratio. That totally depends on the weight you're lifting and the speed you need. I also gutted the control board from this servo and remotely wired in a ultrasonic motor control board. This not only enabled this servo to hold this weight in a horizontal position for hours without overheating but also made the hold silent and tool away that sicking whine. Here may be less expensive boards out there but this is the one I used:
Pololu Jrk 12v12 USB Motor Controller with Feedback
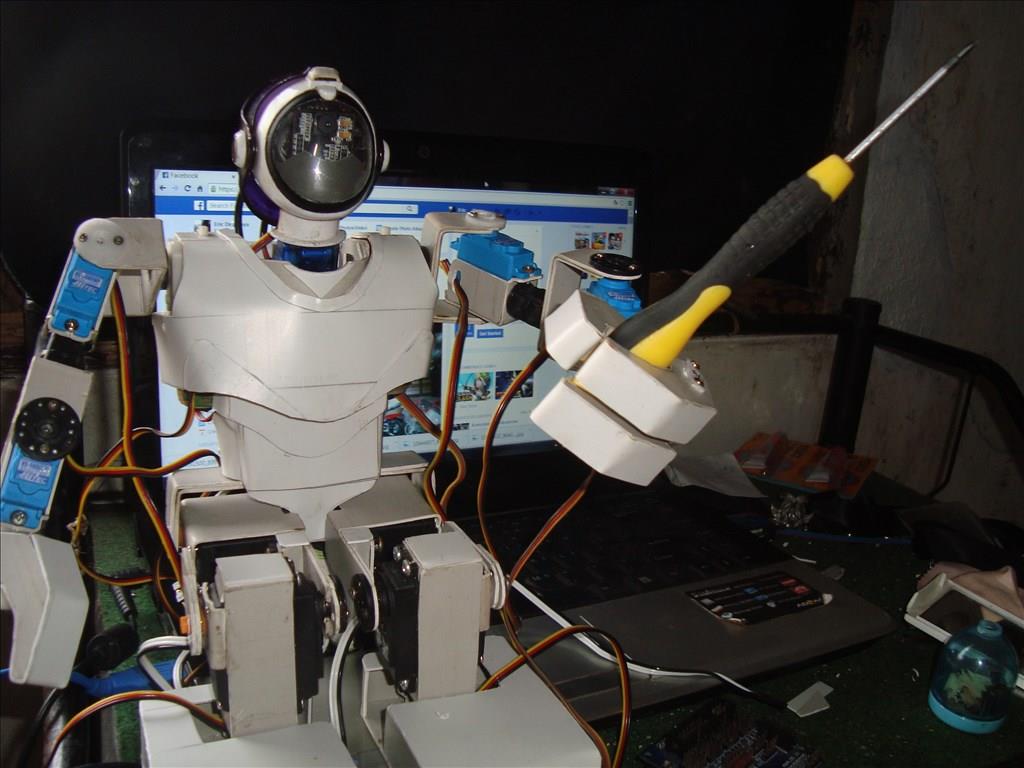
Here's a video I took of me integrating this into my robot arm and this servo:
Hope you find this useful.