



modifying a rc car(truck i guess) to operate off a sabertooth and the ez-b. Any responces are welcome
Specs: Sabertooth 2x12 Ez-b V3 2, 2.8-3A dc motors w/6A peak standard servo for steering
Rc car torn apart:

the main body. the wheels were driven by one motor and gears. going to modify and put 2 motors directly(with gearboxes) on the wheels. then attach to the sabertooth and yadi yadi ya.
By CardboardHacker
— Last update
Discover more robots

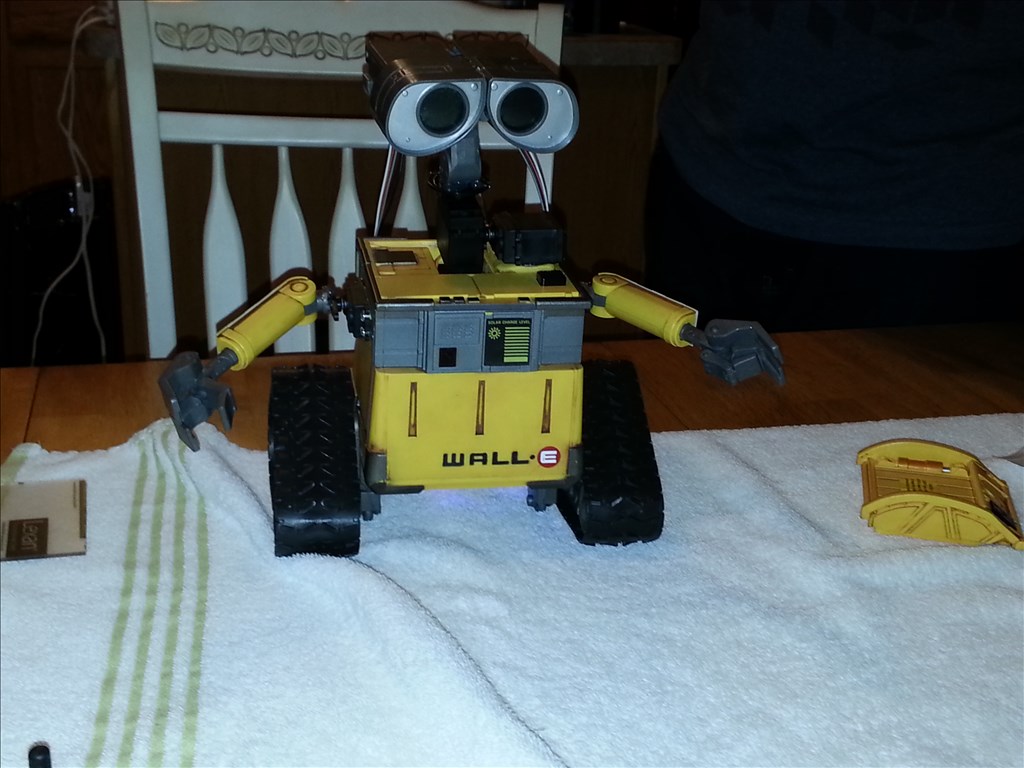
Daman's Yet Another Wall-E
Compact Wall-E build with EZ-Robot: webcam eye, continuous servos, EZ-B mounting, servo speed control and tips for...
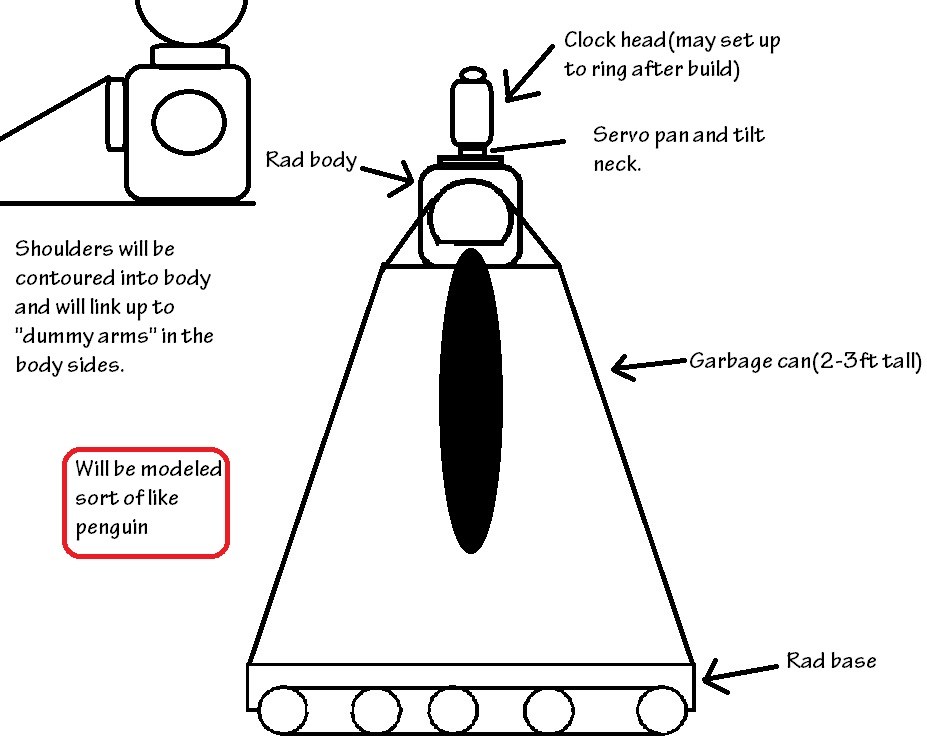
Cardboardhacker's Penguin-Like Robot Project!
Penguin-themed robot design: rad base, white garbage-can body, torso top; considering alarm-clock head and seeking head...
Slim6072's My Wall-E
Wire BlinkM eyes, add sonar, mount camera on head and integrate MP3 Trigger-robot nearly complete and otherwise working...

quote 1: scripts, wii remote, voice commands, autonomous.
quote 2: figured it out an hour ago
#3: will setting the turning values to 0 disable turning with the sabertooth?
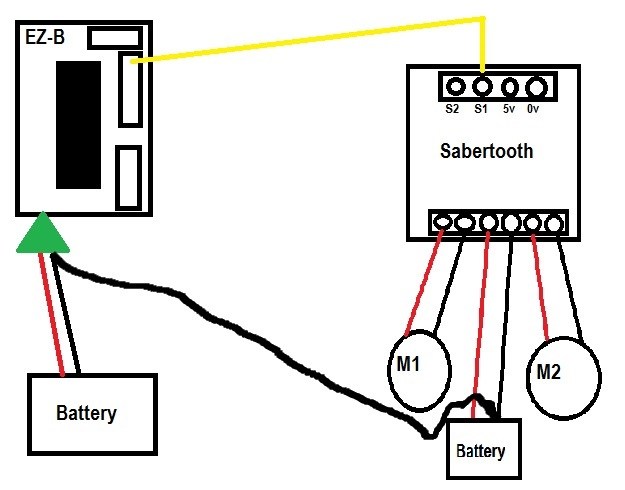
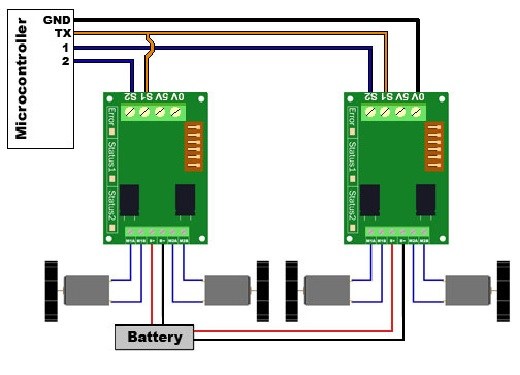
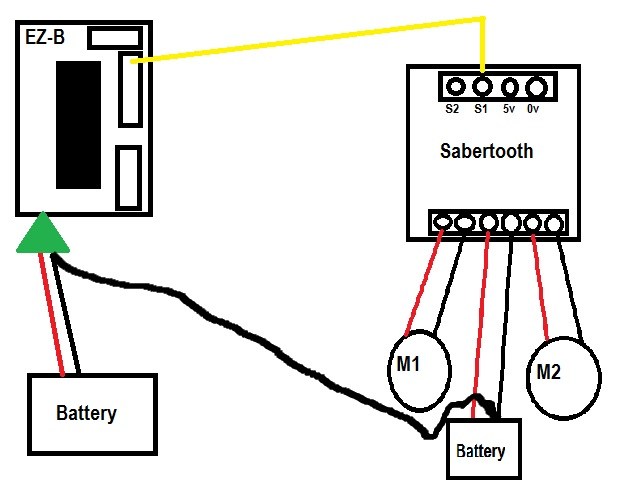
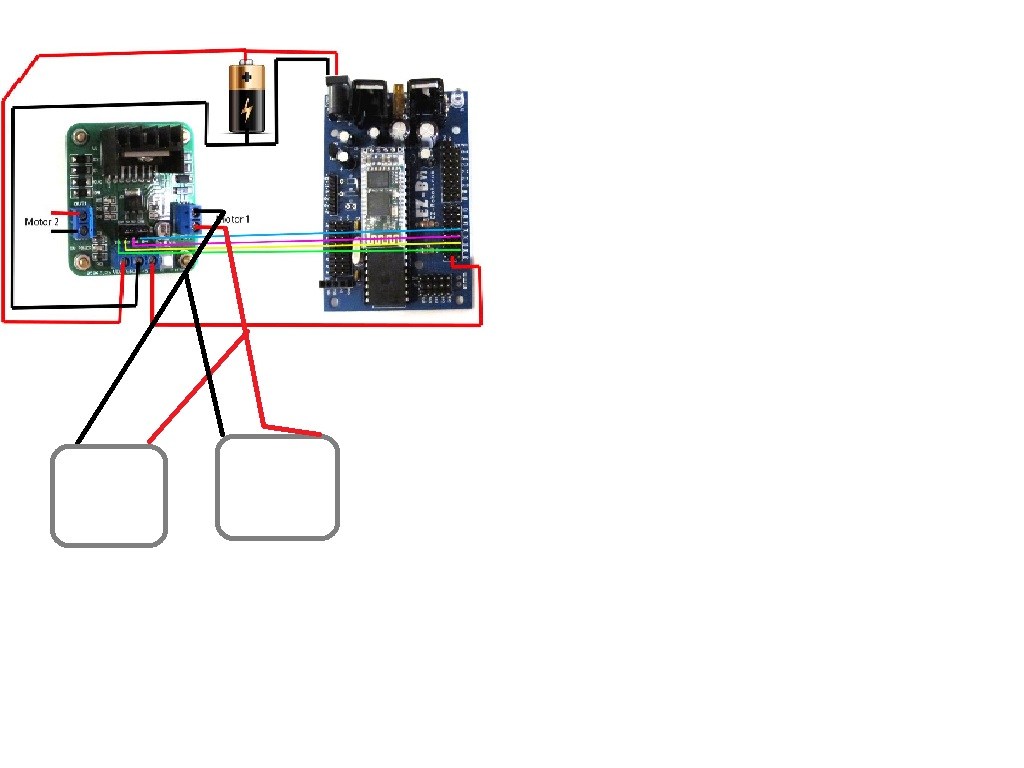
#4: i need a diagram/pic of a sabertooth connected to the ez-b
As I just spotted by @Rgordon in a different topic.
So I would say to set them at 64 and 192 but can't be 100% as I don't have or have ever used a Sabertooth.
0 would confuse it so it wont turn, would you not think?
What is with the values being different?
I don't think there is a position 0.
If you have no need to turn using the sabertooth couldn't you run both motors from one port? Or is the amperage too high?
amperage might be too much for one port
1 motor is 2.8-3A running and 6A jump at start 2 on one im not so sure about.
i need a diagram of the sabertooth connected to the ez-b.