
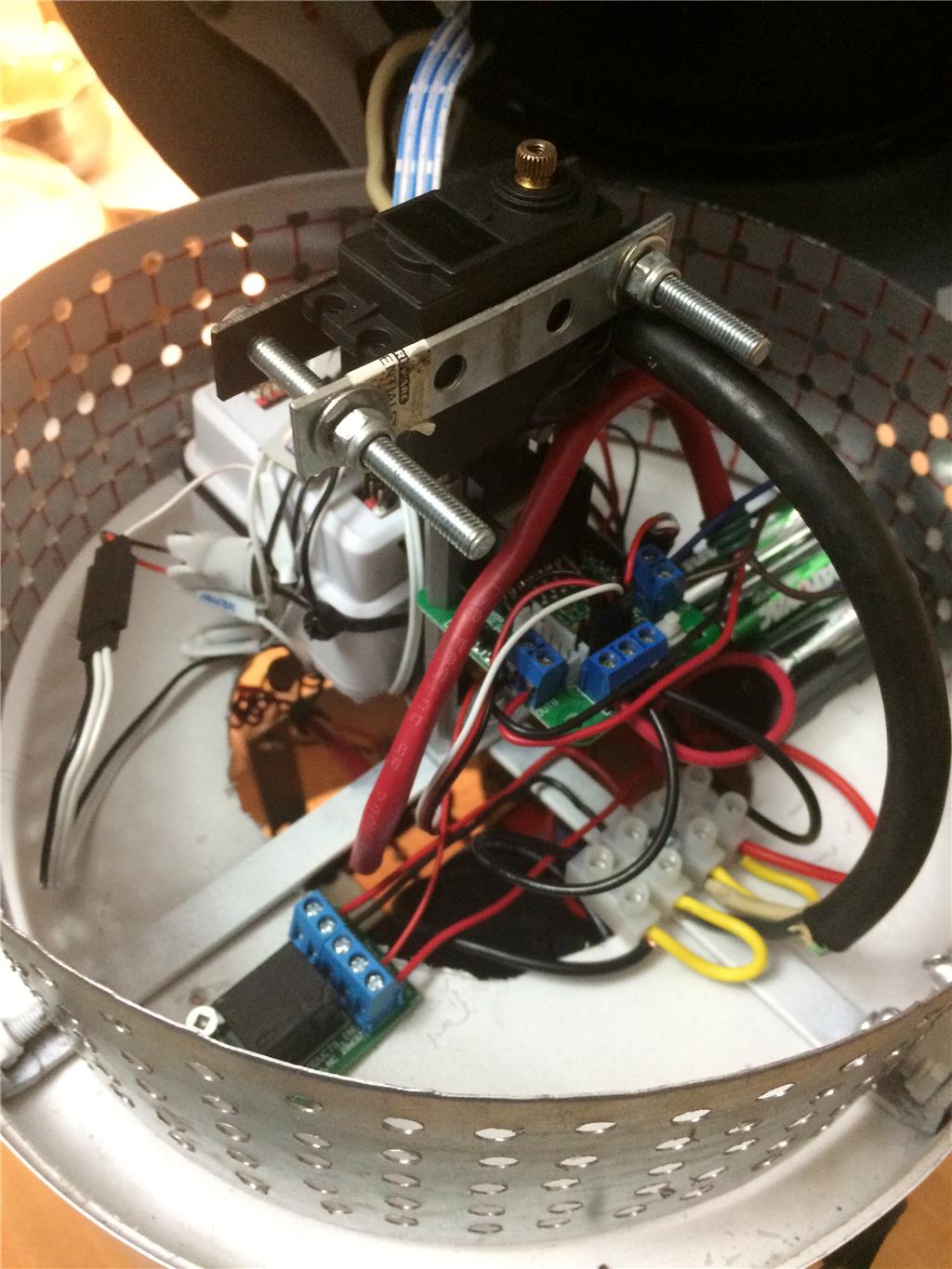
This is my first attempt at constructing from scratch a multi functional robot. using the ez-robot developers kit I have installed A rotating head powered by a metal gear servo with camera as well as sonar on its main body with servo rotation for a wider width. The body is completely constructed by hand using stainless steel sheet metal with aluminum rivets. Right now the ez-b controller is powered by the six pack AA 9 volt battery pack and the 12 V drive wheels are controlled by an H bridge controller powered by a 12V 5 Ah battery. as for the robot it's self it is pretty much done just further modifications will be required. Programming is now my main focus and that will be more of a challenge than the construction aspect



By MikeJ
— Last update
Discover more robots

DJ's Hey Jd, Need A Lift?
JD was a little lazy today, a lighthearted glimpse of a laid-back moment.

Robotz012248's My Desktop Trio Of Robots
Interactive desktop robots built from a Harbor Freight parts box using EZ-B, micro servos, pan/tilt and LEDs, programmed...

Putt's Shorty
Custom EZ-B bot built on a Parallax BOE base with a LynxMotion torso and brackets; work-in-progress assembly

There's a great retro look to your robot! Almost as if it was inspired from an older sci if movie... Can't place my finger on which one. I really like it.
Using sheet metal to make the body was a smart idea!
He's definitely going to make a great robot for around the house. Any plans to add an arm? It'll give more character
Thanks Dj. Yes i would say there was definitely some old movie robots that have inspired me just wanted that classic cheesy robot look. Installing a arm would be a great idea i will need to look into my options for that! As of right now hes more of just a security bot as well as conversation piece. Also thinking of installing usb ports to charge devices and maybe a 120 volt converter for just small stuff but will see.
Wow... for your first attempt you nailed it dude.... Really nice! I love the simplicity of the design... In fact you just gave me an idea for a new Roomba project...
Keep posting man...
Maybe use the ez robot arms (from JD or Roli)... I think they would look awesome on your bot...
Thanks Richard R yeah thats not a bad idea i will keep you guys posted. it would be cool to have the arm perhaps retractable into the chassis..
No photoshop-ing for this, but fair display for how I would make the arm retract. Of course, you might be talking about putting an arm on the top, which would be a little different.
The arm mechanism is supported by some round sliding guides(not drawn), which allows the arm to slide in and out. The lever servo towards the bottom(pink) is attached to the main servo(black) and slides the main servo in and out on the guides using a piece of something as an arm(red). The arm would need to be manipulated to make itself round and come in.
Nice i like that concept i was thinking something like that as well. putting retractable arms on the head portions would be interesting also just not sure how much that servo would handle with that weight added to the head. There is still a decent amount of room left in the main body.
Arms on robots are mostly for personality and learning anyway - don't expect to lift much. But it will sure give the robot more personality and give u more options to learn programming with.