



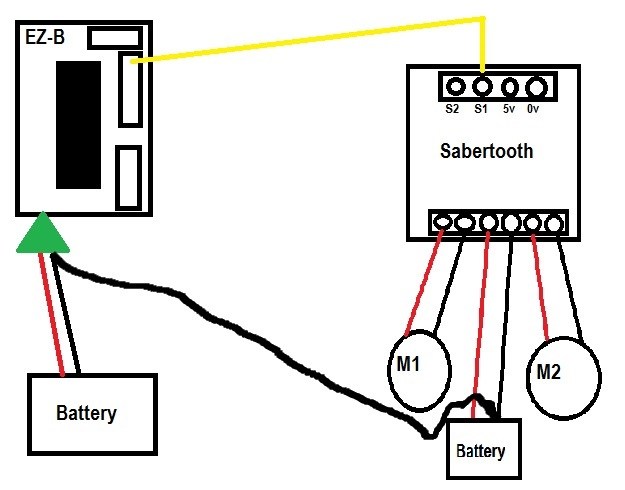
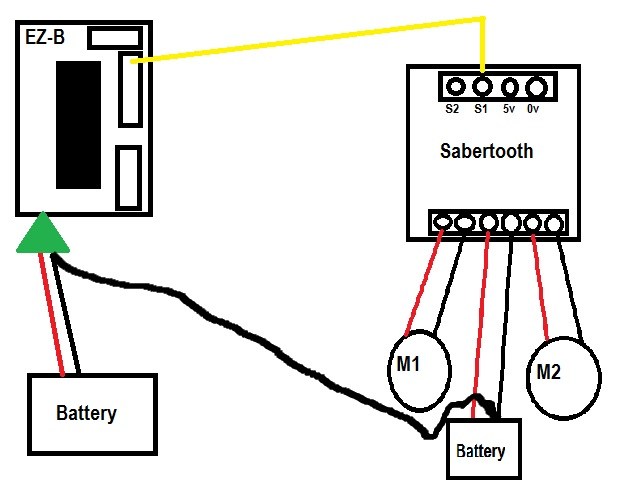
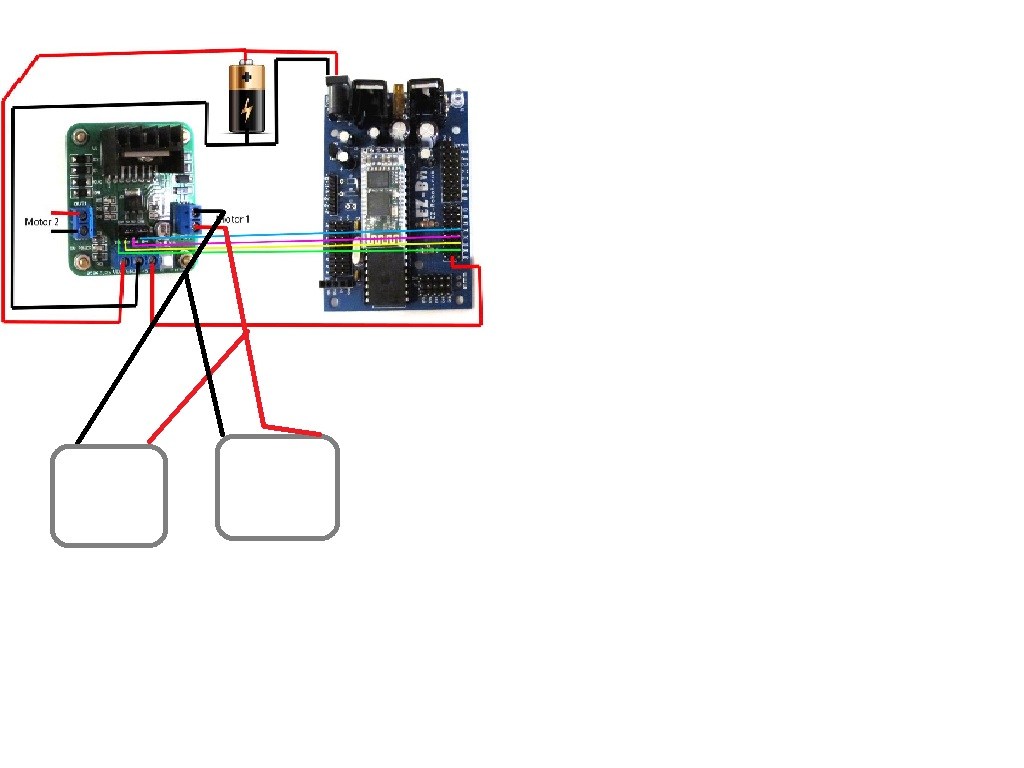
modifying a rc car(truck i guess) to operate off a sabertooth and the ez-b. Any responces are welcome
Specs: Sabertooth 2x12 Ez-b V3 2, 2.8-3A dc motors w/6A peak standard servo for steering
Rc car torn apart:

the main body. the wheels were driven by one motor and gears. going to modify and put 2 motors directly(with gearboxes) on the wheels. then attach to the sabertooth and yadi yadi ya.
By CardboardHacker
— Last update
Discover more robots
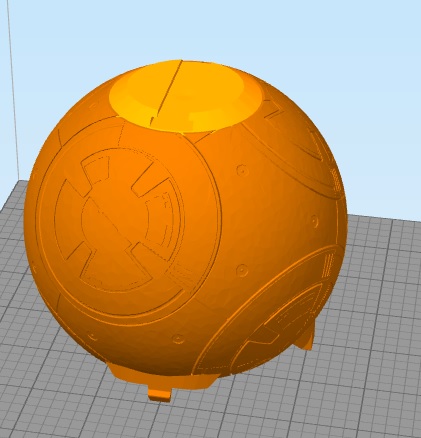
Justinratliff's Ez-Robot Bb-8 Hexapod Body
BB-8 hexapod body for EZRobot: mountable EZBit head, Thingiverse STL and Synthiam community tips.

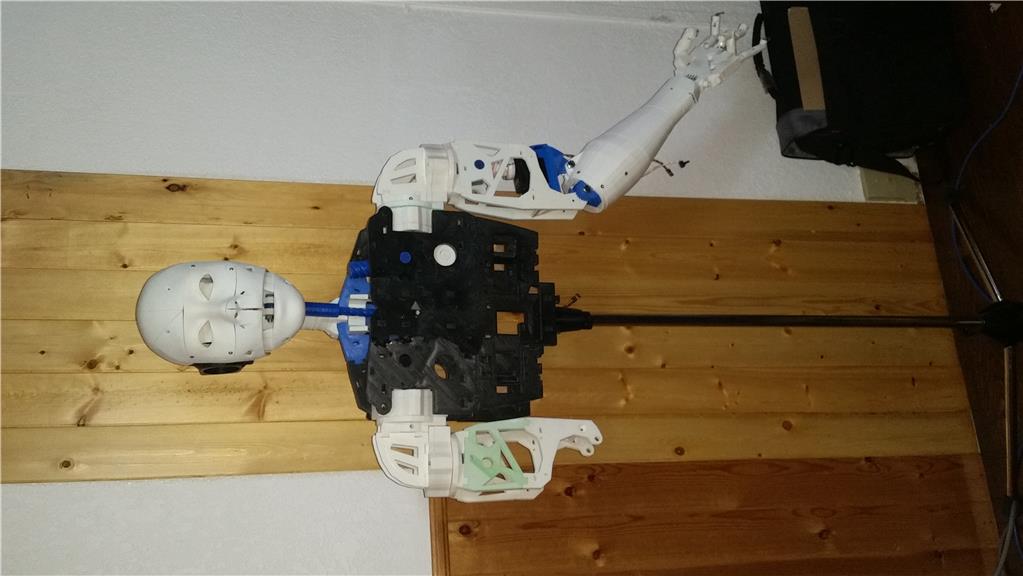
Steve's Meet Aegis
AEGIS robot built from junkyard scrap: steel box-section chassis, drain-chamber torso, car window twist motor, truck air...
Kazobond's Dude (Another Inmoov)
Power Inmoov with a portable LiPo JumpStart and dual Castle BEC-Pro regulators (7.4V & 6.0V) to match EZB-V4 servos,...

1 of two motors without gear box.
and steering which will be heavily moded. by the way, does anyone have a script that will let you control the servo and when you let go it will move back to centre? going to use custom movement panel.
need a command that will cue the sabertooth forward and reverse in the custom movement panel.
will the Forward() command cue the sabertooth motors forward?
K so recap:
1:Need a command that will cue the sabertooth forward and reverse in the custom movement panel. Will the Forward() command cue the sabertooth motors forward and reverse() cue the sabertooth reverse, without sabertooth movement panel? or do i require a sabertooth m.p.?
2:how can i block the sabertooths ability to turn the wheels different ways? Thinking i will try setting the left turn and right turn values to 0. will this work?
Any responces will be great.
Modified the chassis to fit the motors.
The motors and their gear boxes are in place.
This is cool! Nice re-use of parts.