









I'm 3D printing an R2-Q5 imperial droid and using the EZ-b4 as the brains. I'm still working on the body and need the rest of the lights for the dome, which I have assembled and painted.



Here is some stuff from my build log showcasing the Ez-b so far!
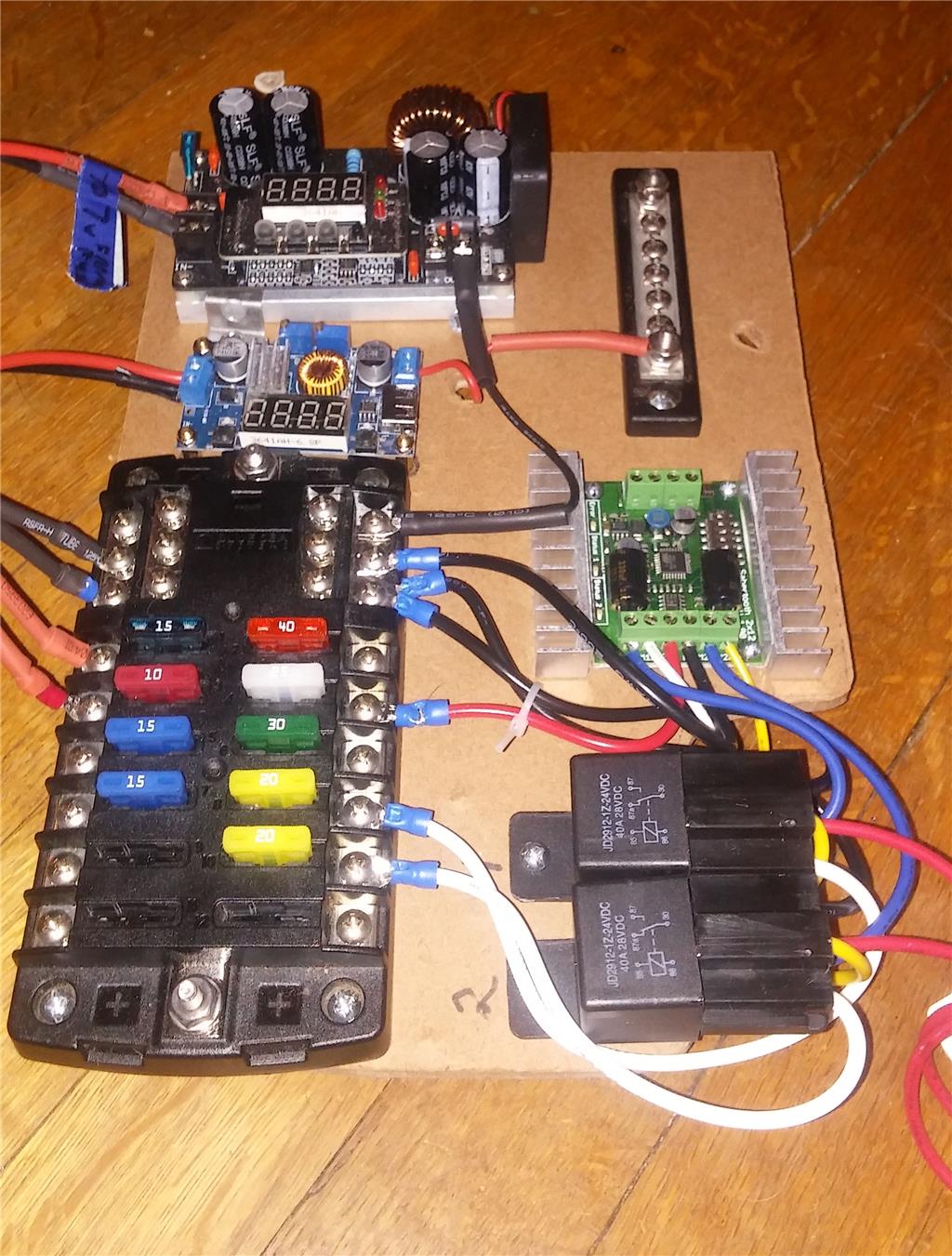
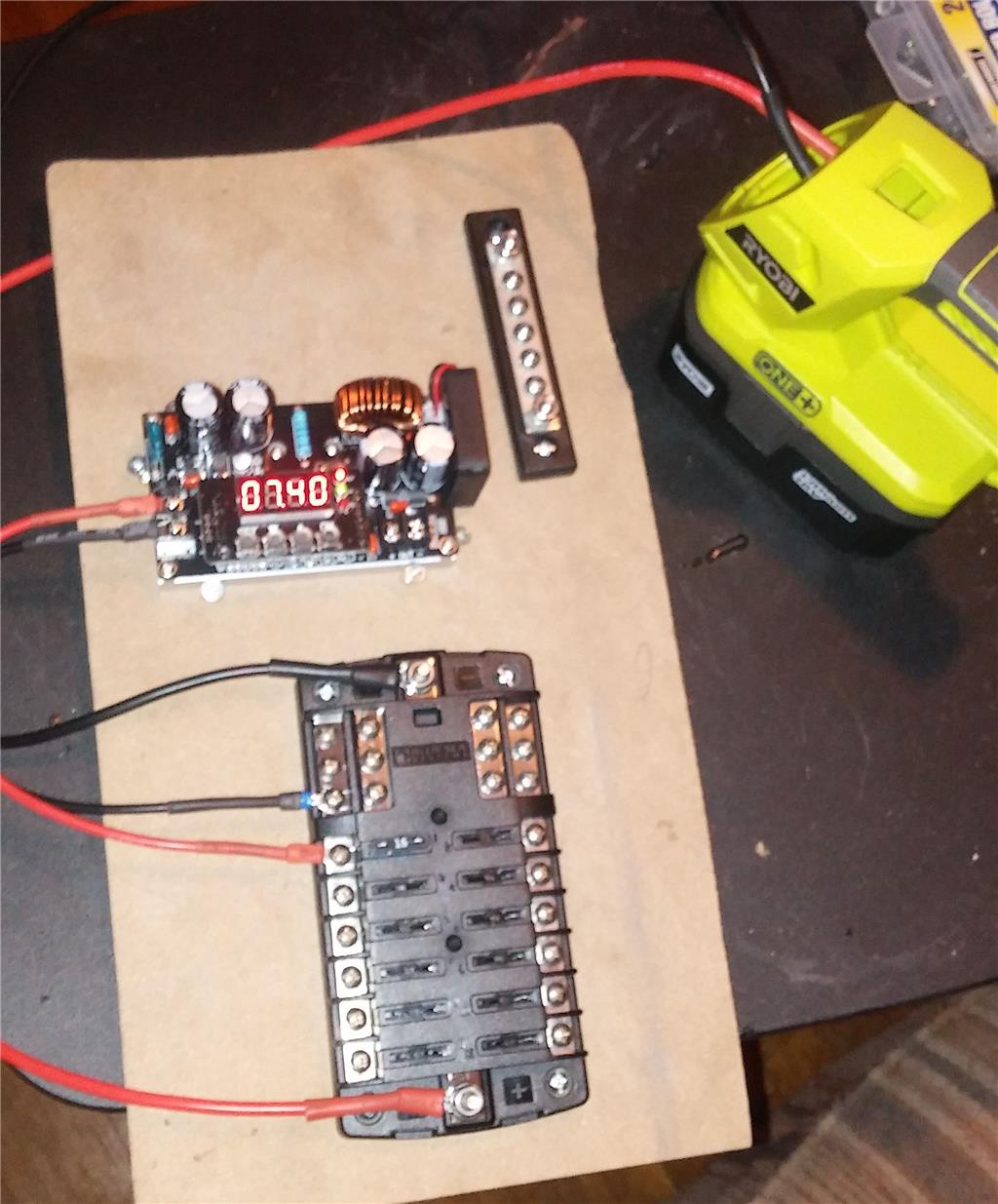
I'm running the droid off of a Ryobi 18v battery, which I might add a second one in later and I'm using a buck converter to run the EZ-b at 7.4 volts. I'm using cheap hobby servos for the panels and I have the little buck converters someone here recommended ebay buck converters to run the servos at 5v. They will take the 7 volts max, but I don't want to chance it. I'm using the servos that came with the developers kit for heavier applications and the camera up and down motion.
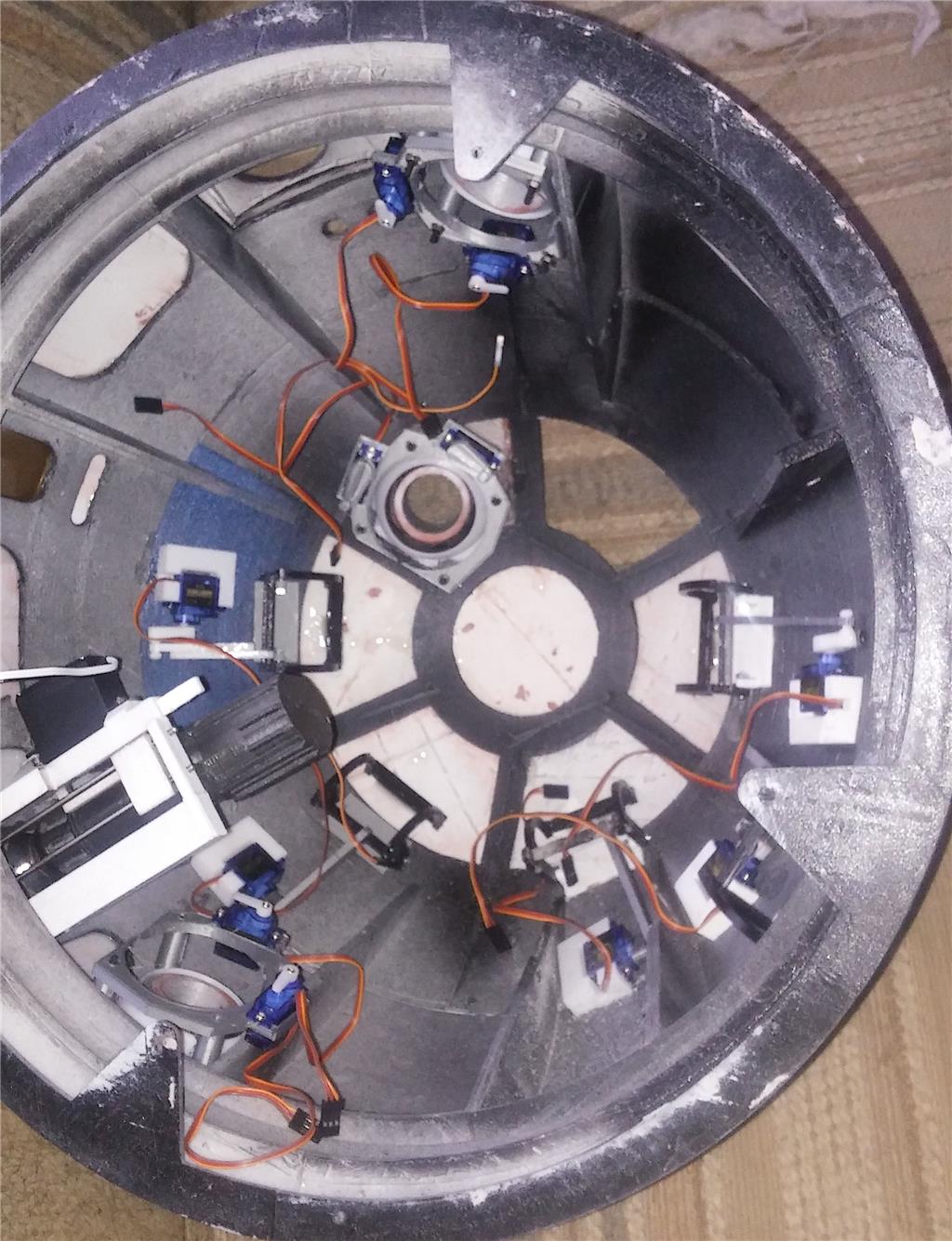

I put the camera in the dome, I printed a test panel to test placement, the put it in my dome.


I put the continous rotational servo with wheel in the body to see how it spins the lazy susan and it worked well, I just have to test it with the dome on it when I'm done finishing up the body
I also tested out the sound servos .
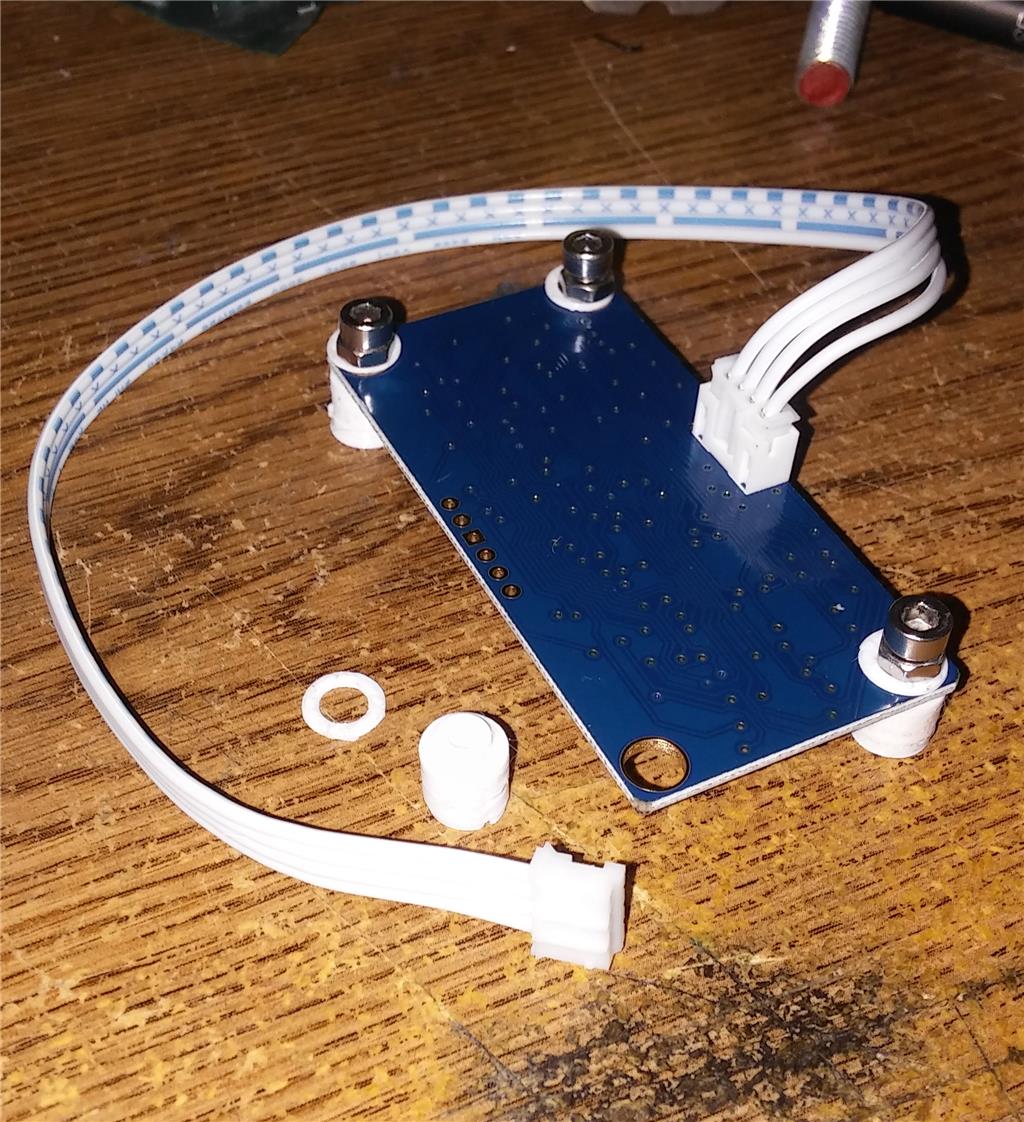
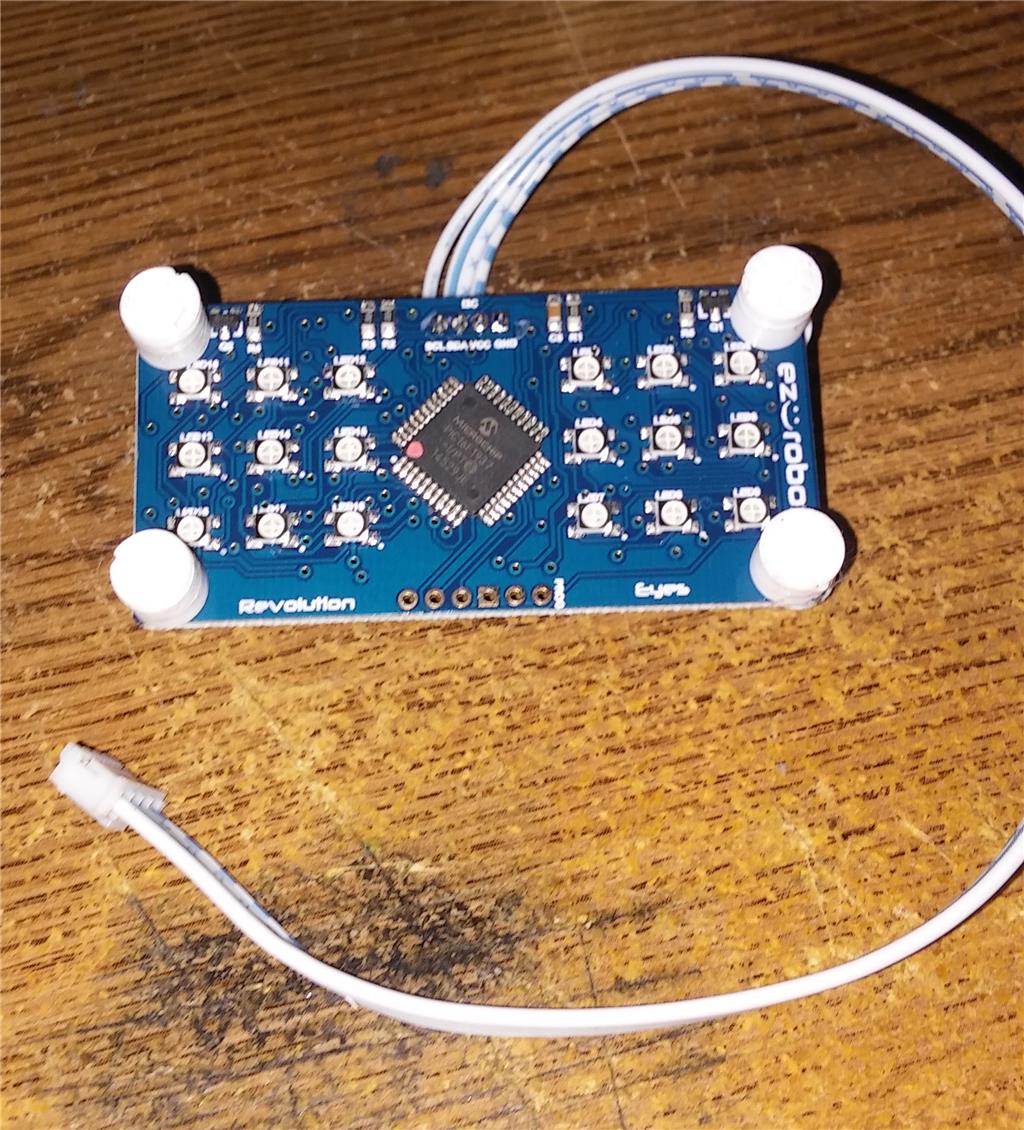
I just picked up the 18 RGB LED Block to use in the magic panel and it works good, since it's used for eyes, I'm missing a row of lights, if I put in a light diffuser, it might look better. I took it out of the case, printes some plugs that will glue to the inside of the dome to hold them in place.




And a video test of the lights
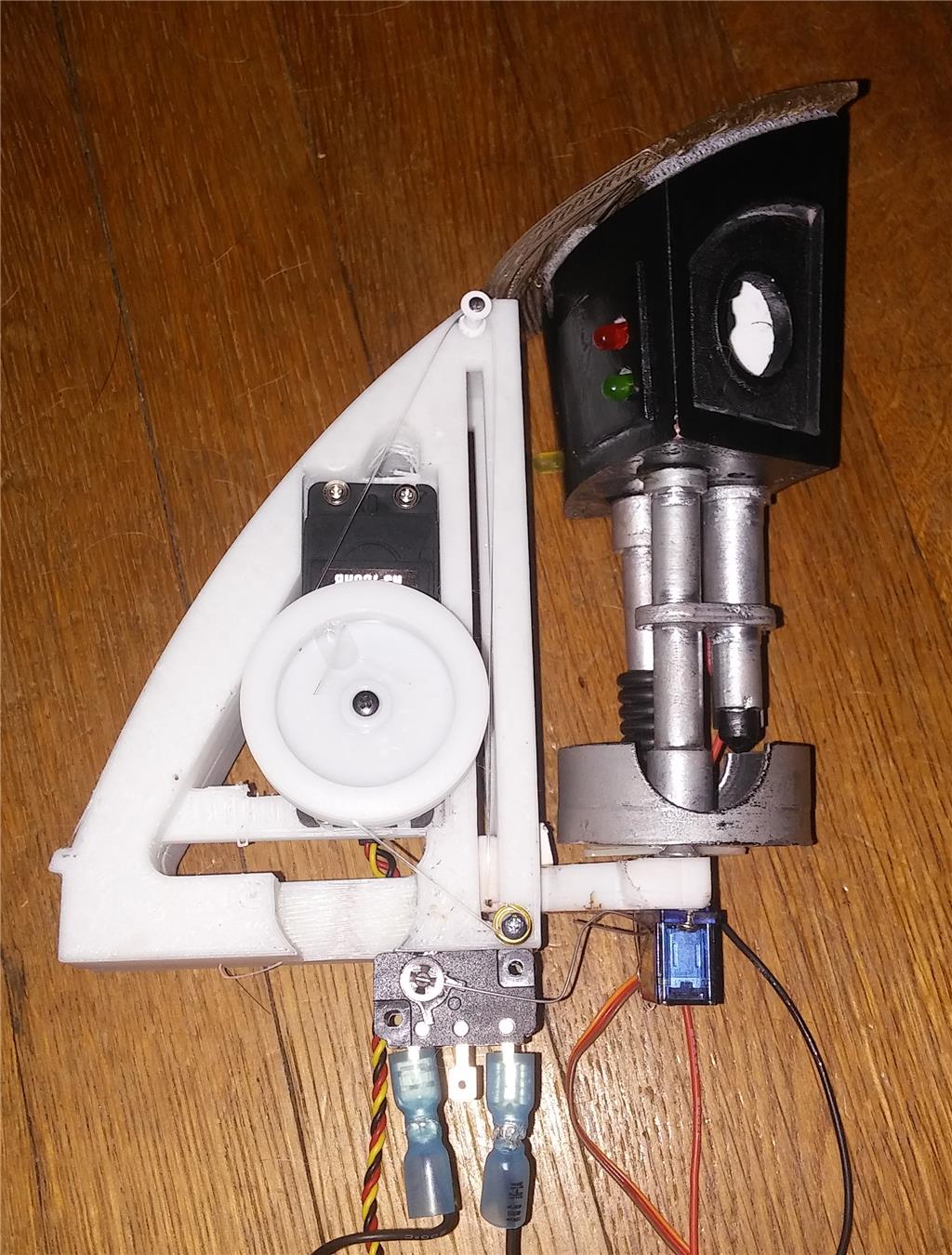
This droid has a canon in one of the panels, you might see part of it in the picture of the inside of the dome, I have a servo that moves it in and out , plus I have a script that opens the panel, the canon slides out, jerks back and makes a blaster sound. It's catching on the opening so I have to tweak it, then I'll have a video of it. I have a script of the holoprojectors randomly moving around and one of the droid making different random chirps and beeps.
I have scripts that open and close the different panels. And I have 3 different LEDs in the holoprojectors on three ports that turn on and off.
This is about how far I've gotten.
Discover more robots
Kazobond's Dude (Another Inmoov)
DJ's Master Blaster Robot


Nice work man! Great build... where did you get the STL's for R2?
Keep us posted
Nice build kashyyyk! The RGB animator has some cool efects. Have fun!
From MrBaddeley Some of his stuff is on Thingiverse.
Amazing build @kashyyyk !
I really like the creative elements you've added!
I love these R2 builds. Nice work on this one.
Wow, I have a lot done since I last posted. It is done body wise, I'm getting ready to purchase my sabertooth and change by battery for one with more amp hours, 2 12v SLA with 20AH in series to give me 24 v for the foot moters.
The dome spin was slipping so I changed it out for a toothed gear and the continuous spin servo.
I purchased Flthys holo light system, which has random servo movement built into it, which freed up 6 ports on the EZ-B, which was good, because now I only have 1 left.
JD recommended a winch servo for my periscope which gives me more turns then a 180 . The lights were turned on and off by the microswitch, but after I installed it I fried my pro-mini so I have a short in the periscope now.
I can control the gripper arm and Hyper drive probe. I just need to create some actions for them.
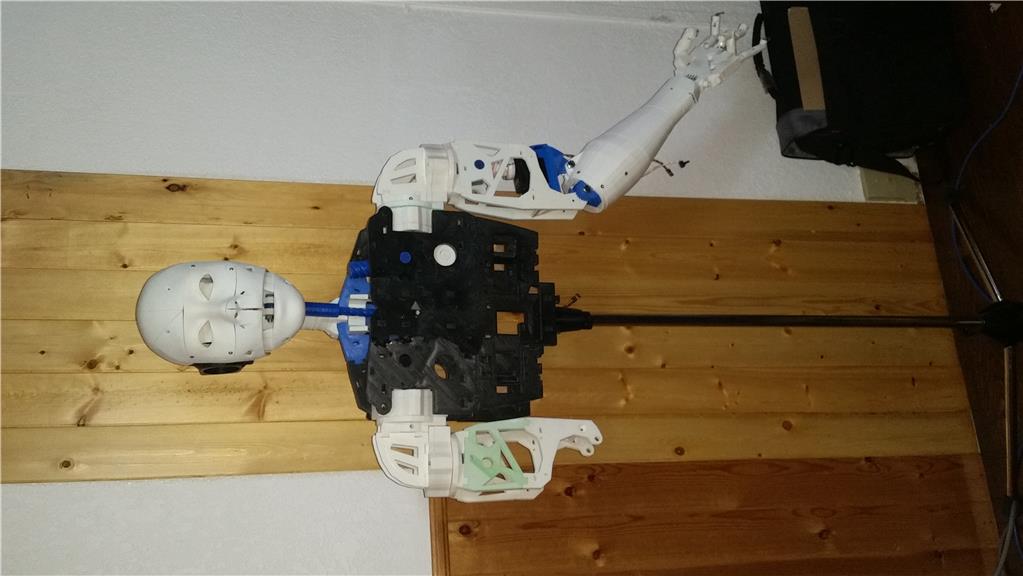
Here it is fully assembled.
Here is quick video, it doesn't show everything, I was doing some tests.
The hololights are connected by Ic2 and I have a bunch of scripts that change the colors. This is showing the sound servo motion and at the end there is a gap because I haven't created actions for it yet, I have the gripper arm come out.
I have about 20 audio clips of different R2 sounds set up through the personality generator, and I have the holo lights change with them.
In my start script for the EZ-B I have the sound servo paused. For the song to play I have it set up to turn off the personality generator, unpause the sound servo then plays the song, then it pauses the sound servo and unpauses the personality generator after song is finished.
That is impressive....I bet this was quiet a challenge but so worth it! Must be very rewarding in the end!