





























































































































Now I have the EZ-B kit and the Hearoid it's time to start my Showcase thread.
I still haven't decided on a name for him yet, all suggestions are welcome.
I won this robot on ebay weeks ago, for the past 2 weeks he has been waiting for me to collect him...

Today was the day, a road trip to pick him up and bring him back to his new home...

In his new home (with Omnibot and Wall-e in the background totally unaware they are next in line to be opened up)

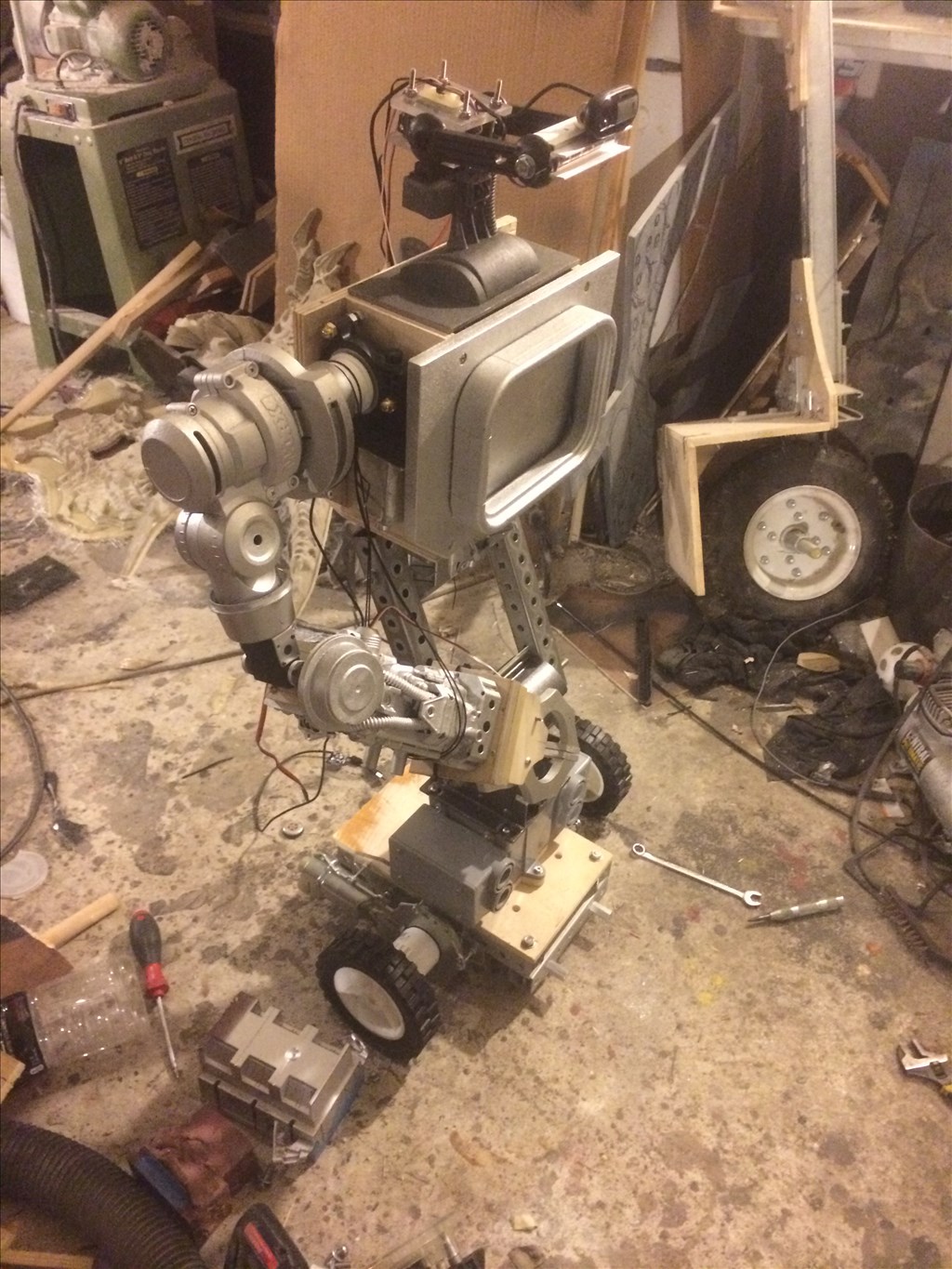
It wasn't long before this happened...

Now waiting to go in the dishwasher to get nice and clean.
The plan is to make him autonomous, running 24/7 (except for when he knows to go charge himself up) but will also be adding in the various image tracking options.
The only other slight modifications to be made to him are to convert the head to tilt & pan which will involve having to give him a small neck.
The head will include the camera. I haven't yet decided to fit it in one of his eyes or to make it his nose. The issue to overcome with this is the blue tint on the bubble head. The mouth will have a light or some lights in which flicker when he speaks.
The arms will be given some life with servos at the shoulder joints and the elbows provided I can get them to fit in there nicely.
Ultrasonic sensor will be in his chest, probably on a servo to give a wider view.
Original drive wheels and gearbox seem to be in very good shape so will plan to reuse those and just replace the existing motors for the modified servos if they can manage the task.
Speaker and microphone will be in the original positions - if it's not broke why fix it?
Not too big a project but enough to give me a test, help me learn and bring an old robot back to life.
Discover more robots
DJ's Jd's Friday The 13Th

DJ's Teddy Ruxpin Robot V1

waiting on the script tutorial you said you are putting out Last on analog was real good
Two blinkM are good enough to light it I think.
I order a few last week .they are very cool TROY
Do you have the code you used .
I will answer briefly because this isn't what Rich is going to use. I used the manual from ThingM and I believe the I2CWrite or SendI2C command to send the commands to the board. The current online manual on it says SendI2C. Of course, if you have more than one in the line you have to program a unique address in each using the before mentioned manual.
Dude! That is uber creepy! That brain with the lights is soooo cool.
THANKS TROY when i get back in 10 more days will try it,i miss building robots
I was playing a bit more last night, have a few TIP circuits hooked up to my other EZB just to do some random light patterns, it's like a disco in his head
There may be a solution being worked on for the head control via I2C which will save the need to install a second EZB so we will see how that pans out.
Still not much space for the camera, it certainly wont fit in below the eyes and I'd like to keep the mouth too. Reluctant to drill the brain to mount it too so kinda stumped at the moment on that one. The worst case scenario is it would be mounted on top of the helmet and disguised to look like part of the helmet - some of my best fibre glass working skills will need to come in to play for that one though unless Milliput can save me (not that I dislike fibre glass).
Since it's not going to ever look stock with this head I may end up changing the arms too. Something a little more flexible than the original ones but we will see, it all depends on cost and space on the arms. This may also push it over to needing 2 EZBs, so that may end up happening, we will see.
The LCD display is finally ordered now too so I can make a start on programming that to display voltage levels and other debug information. It is due in May though, so 6 week delivery... hopefully that's worst case and it'll actually turn up within a week.
RICH they make much smaller camera's ,but with the extra hardware and would need a on-board computer i guess for youur design it would be to hard.