





























































































































Now I have the EZ-B kit and the Hearoid it's time to start my Showcase thread.
I still haven't decided on a name for him yet, all suggestions are welcome.
I won this robot on ebay weeks ago, for the past 2 weeks he has been waiting for me to collect him...

Today was the day, a road trip to pick him up and bring him back to his new home...

In his new home (with Omnibot and Wall-e in the background totally unaware they are next in line to be opened up)

It wasn't long before this happened...

Now waiting to go in the dishwasher to get nice and clean.
The plan is to make him autonomous, running 24/7 (except for when he knows to go charge himself up) but will also be adding in the various image tracking options.
The only other slight modifications to be made to him are to convert the head to tilt & pan which will involve having to give him a small neck.
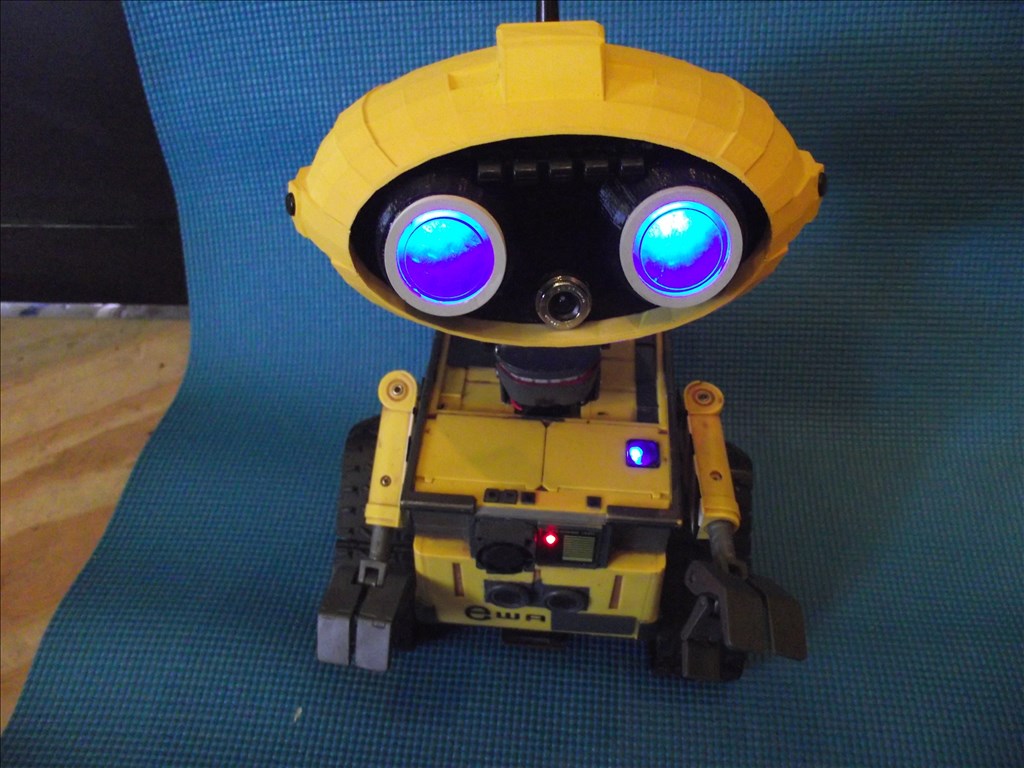
The head will include the camera. I haven't yet decided to fit it in one of his eyes or to make it his nose. The issue to overcome with this is the blue tint on the bubble head. The mouth will have a light or some lights in which flicker when he speaks.
The arms will be given some life with servos at the shoulder joints and the elbows provided I can get them to fit in there nicely.
Ultrasonic sensor will be in his chest, probably on a servo to give a wider view.
Original drive wheels and gearbox seem to be in very good shape so will plan to reuse those and just replace the existing motors for the modified servos if they can manage the task.
Speaker and microphone will be in the original positions - if it's not broke why fix it?
Not too big a project but enough to give me a test, help me learn and bring an old robot back to life.
Discover more robots
Rb550f's Meet Ewa

Nomad's Using Robosapien V2


GREAT idea TROY ,i like it too
O n my posts or my projects i love others giving me idea and popst a link a link to thier projects or designs it make the design a lot better to have others helping others build a better robots
IT shame some dont like to share or give ideas or if a idea is given THEY dont have to use the idea
ANY robot projects just like the one DJ made is for others to build that project or use part of it or make it better,
that what the showcase it partly about,like on roborad project i use part of his design and the first project i saw JOSH omnibot 2000 i use part of his ideas for mine
MORE of us need to work together ant not think its all about arguing ,i know i made a FEW mistakes in the past,BUT THATS in the past
my idea is only trying to give RICH idea ,but he takes it a different way
just like HIS PROJECT i lookingg at using some of his ideas too,and the scripts also for my builds.
My last post for a few days ,i need to work long hours this week and the next 3 weeks where i am at.
I KNOW this will make RICH happy
[Edit] Deleted. Post no longer relevant.
Not to take sides or anything, but the logic is not flawed. I mean you could just say that you built this and put it in your robot, then as Troy showed the thread link, link it to its own thread. Then your not only freeing up pages for just your robot but then people would get your information/ help a lot faster. I can't see the downside to it to be honest. Keeps it all organized to because you could just have something of a link history in your first post rather than just going through all the pages. Not telling you what to do, just stating the positives that I can find coming from using that system.
Don't worry about it Troy.
Erreul, the problem is despite informing on countless occasions that I will not be using an idea Fred seems to continue to post about it despite there being specific threads covering the topic where those ideas should be posted as described in an earlier post. And as witnessed, when explained why those ideas do not belong in this topic and the discussion of that idea is over he questions it in a childlike manner - the same happens when ideas are thrown out. Those posts are not welcomed in my topic and it is now a case of either I ignore him completely to avoid this crap happening constantly or I stop using this forum.
An idea is fine, constantly posting for 2 pages worth of back and forth crap about it is not welcomed. A perfect example is the LiPo monitor, there is another topic specifically for that which could be a better place to advise on how to do it with only one ADC port, I advised I have enough spare, no spare digital and that the idea is not good for my build and he continues to go on about it here, not in the other one where it belongs.
I hope that's the last on this and that the topic can get back to my robot build although I'm sure he will continue to post or act the victim despite stating that I will be ignoring him.
Rich i dont wont you to stop using this forum ,you are a really good programmer and we need your help and ideas.
only trying to post and explain my ideas for you and others thats all. JUST you take it a lilltle differently.
some idea's i gave you said you didnt like them and latter i see your are using it one very good example on about the 4 page you said adding the zener to your low battery not a good idea and now you are using it.
i posted many ideas to others builds ,some use and some dont ,BUT none say it doesnt belong in thier build only you
WELL LAST POST ON THIS topic or other topics for awhile dont worry not leaving ,only have very long work hours (12 hours) per day or more
Roger that. So what's next on the menu?
Well hopefully the 4mm bullet connectors turn up tonight so I can finally replace the old battery.
I have a new idea for the eyes too but need to find the right parts which are proving difficult but will be worth it if I can find them. But that's a secret at the moment (Always keep them wanting more and all that).
(Always keep them wanting more and all that).
Front panel still needs designing so may get on to that but struggling to source a serial LCD display or an I2C display that works.
Also need to fit a switch to disconnect the battery although it'll be seldom used once finished, also need it to disconnect the balance port too so 3 switches (6 if I use 2 batteries) or switch the ground which I prefer not to do (no reason, just prefer to have power isolated from the + side)
More schematics to work on too, I may throw some up although they are likely to change if the eyes happen.
And, of course the arms... maybe...
Well then, I'm sure you'll impress. Are arms really that difficult to do? Maybe not difficult, but menial.