




























































































































Now I have the EZ-B kit and the Hearoid it's time to start my Showcase thread.
I still haven't decided on a name for him yet, all suggestions are welcome.
I won this robot on ebay weeks ago, for the past 2 weeks he has been waiting for me to collect him...

Today was the day, a road trip to pick him up and bring him back to his new home...

In his new home (with Omnibot and Wall-e in the background totally unaware they are next in line to be opened up)

It wasn't long before this happened...

Now waiting to go in the dishwasher to get nice and clean.
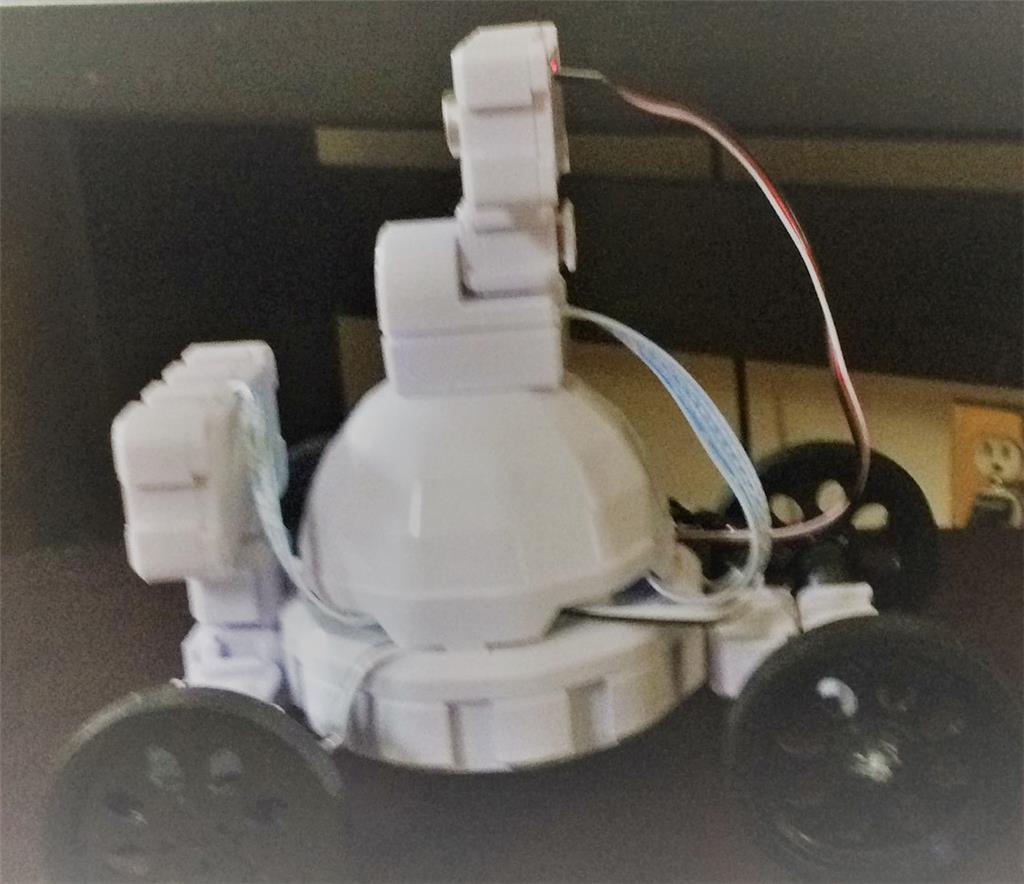
The plan is to make him autonomous, running 24/7 (except for when he knows to go charge himself up) but will also be adding in the various image tracking options.
The only other slight modifications to be made to him are to convert the head to tilt & pan which will involve having to give him a small neck.
The head will include the camera. I haven't yet decided to fit it in one of his eyes or to make it his nose. The issue to overcome with this is the blue tint on the bubble head. The mouth will have a light or some lights in which flicker when he speaks.
The arms will be given some life with servos at the shoulder joints and the elbows provided I can get them to fit in there nicely.
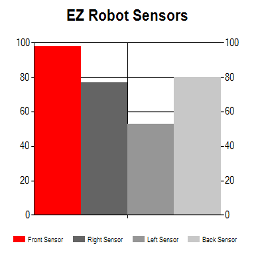
Ultrasonic sensor will be in his chest, probably on a servo to give a wider view.
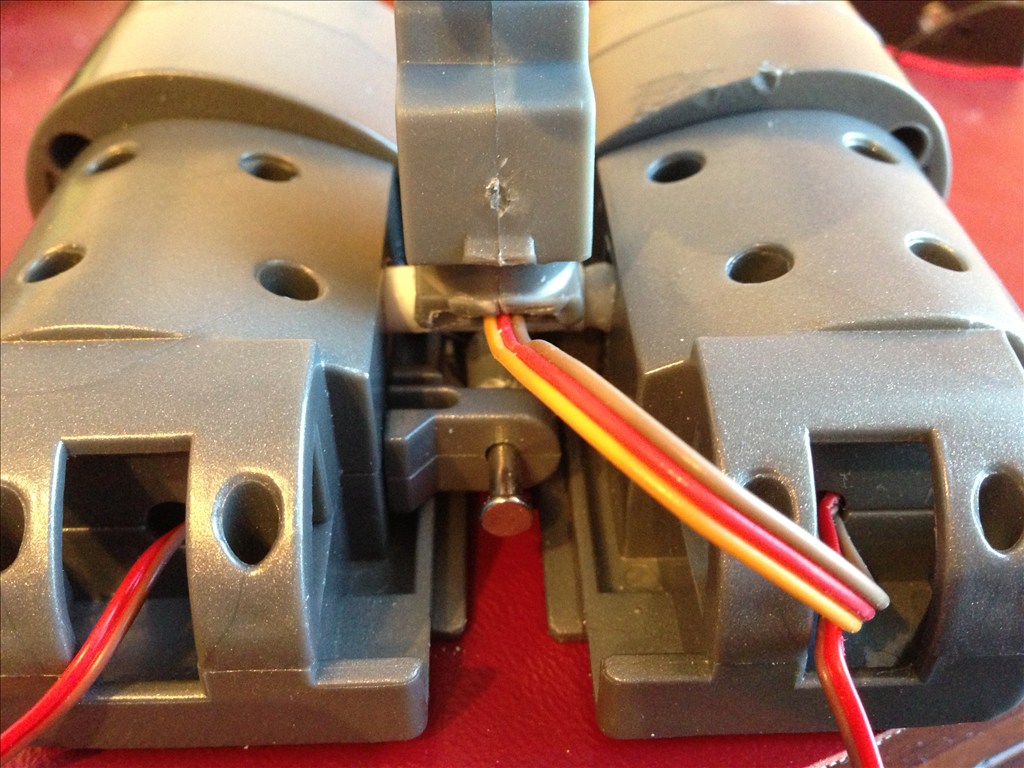
Original drive wheels and gearbox seem to be in very good shape so will plan to reuse those and just replace the existing motors for the modified servos if they can manage the task.
Speaker and microphone will be in the original positions - if it's not broke why fix it?
Not too big a project but enough to give me a test, help me learn and bring an old robot back to life.
Discover more robots
Ezang's Mymodifiedadventurebot

DJ's Snow Shovel Robot

it seems you may have on thats not great.ones i have dont fluctuates,maybe because i added a filter you said it not working,way the sensor work is distance and thats only to check it
One you have might have a long distance measurent,if you need to pick collision close you need to get another type
I use different IR sensors for different detecting this is witch one you need for 10 cm to 80 cm GP2Y0A21YK
The ones I have work fine for what they need to do. They are close range proxomity sensors.
I also got the details completely wrong, they are 4cm to 30cm so the factor is (30-4)/255 so 0.10196078431. I only need to detect a few inches at most, so around 10cm which is well within the range. I may have got the ADC value backwards too, I'm not sure without checking.
They only fluctuate over long distances and I assume that's down to the distance, light and probably a whole bunch of other factors.
The data sheet is here
The 10cm to 80cm aren't suitable, I need less than 10cm as a minimum.
@Rich Its interesting how humans "personify" inanimate objects( ships are a big example and sometimes computers/programming)... and yes I too liked Hearoid's sleepy posture, For those of us who have had children, it reminds me of my little ones falling asleep in their high chair!
I really like it Rich, when you present the " ooops's/errors" of your builds because two reasons , it shows how human you are with ego not in the way .....and ...we all learn from errors as well!
@robotmaker and yes I agree ,everyone like to have their own design (wait till you see mine) very much like a Zoo or peoples plates at a smorgasboard
and yes I too liked Hearoid's sleepy posture, For those of us who have had children, it reminds me of my little ones falling asleep in their high chair!
I really like it Rich, when you present the " ooops's/errors" of your builds because two reasons , it shows how human you are with ego not in the way .....and ...we all learn from errors as well!
@robotmaker and yes I agree ,everyone like to have their own design (wait till you see mine) very much like a Zoo or peoples plates at a smorgasboard Breakfast time ..I am getting hungry now!
Breakfast time ..I am getting hungry now!
ok you said you needed at near 80 cm you needed to detect thats the reason i bought it up and you said they wasent working and not stable
also i dont know if you know this but one thats analog is mostly for distance,not collision but still can be set as one ,digital ones mostly for collision
@irobot I will be honest, this forum is pretty much the only place my ego doesn't follow me, or at least I try to keep it in check but this is also probably the only place where I see people who are better than me.
@robotmaker, that wasn't what I was saying but the advise will be useful in the future. I've added the one you suggested to my shopping list for another project.
soon then i get my optical bench finish and to help others besides you will put info up on all types of IR'S plus how to make the very stable,they mostly need a simple rc filter.
Need to get parts in and mill them for holders for different sensors and materials.
Awesome contribution robotmaker! A data sheet for various sensors!