





























































































































Now I have the EZ-B kit and the Hearoid it's time to start my Showcase thread.
I still haven't decided on a name for him yet, all suggestions are welcome.
I won this robot on ebay weeks ago, for the past 2 weeks he has been waiting for me to collect him...

Today was the day, a road trip to pick him up and bring him back to his new home...

In his new home (with Omnibot and Wall-e in the background totally unaware they are next in line to be opened up)

It wasn't long before this happened...

Now waiting to go in the dishwasher to get nice and clean.
The plan is to make him autonomous, running 24/7 (except for when he knows to go charge himself up) but will also be adding in the various image tracking options.
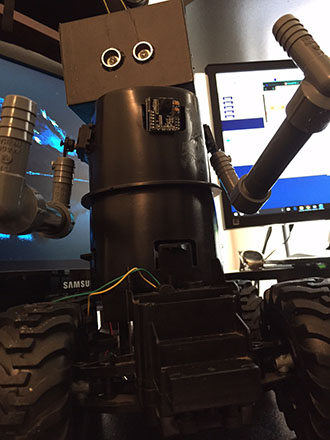
The only other slight modifications to be made to him are to convert the head to tilt & pan which will involve having to give him a small neck.
The head will include the camera. I haven't yet decided to fit it in one of his eyes or to make it his nose. The issue to overcome with this is the blue tint on the bubble head. The mouth will have a light or some lights in which flicker when he speaks.
The arms will be given some life with servos at the shoulder joints and the elbows provided I can get them to fit in there nicely.
Ultrasonic sensor will be in his chest, probably on a servo to give a wider view.
Original drive wheels and gearbox seem to be in very good shape so will plan to reuse those and just replace the existing motors for the modified servos if they can manage the task.
Speaker and microphone will be in the original positions - if it's not broke why fix it?
Not too big a project but enough to give me a test, help me learn and bring an old robot back to life.
Discover more robots

Dave's Bimbo The Clown

Toymaker's My Little Dewey (Drone 1) New Home

I am thinking not about ERREUL idea,but using it with other sensors to map a room for navigation.
So far you adding those sensors in the #1 of this page looks kinda good.
but would be good to have the same on the sides both IR and sonar and 2 at a angle in the front and small cone detection,main reason is to use for detecting wall corners
IF you dont like the idea on your project its great,.just a idea for others
I have no need to detect wall corners. There is no reason to add any sensors to the sides and doing so would go against the design spec of keeping it as stealth as possible.
Not to mention, I am using almost all digital ports already, plan to use all analogue ports and this project will only be rocking a single EZB so adding in any extra sensors is a no go. Also checking that many sensors at a usable speed would bog down and flood the communications between the EZB and the PC, increase the CPU usage and has a possibility of causing major slow down. Checking every 50ms for 8 IR sensors on the ADC ports would be 160 checks per second, when I ran the benchmark I believe (from memory, I will check again when I feel like it) it managed between 70 and 80 per second so would have to be dropped to 100ms between checks for starters and that doesn't take in to account the added stress on the CPU.
Might as well skip pages 15, 16 & 17... skip to page 18
Ok great only a idea,others looking at your build may need it,
Doesnt hurt or matter to me you dont use it,ONLY A IDEA to help you out.
i found ways to add more analog and digital ports without another EZB ,looking to post my design up in a few days and its under $1.00
Unless it also improves the communication between the EZB and the PC then it will be of little use. sleep
It will be the same communcation .only uses one chip with up to 16 analog and another chip up to 16 digitals using mostly one analog port and 3 digital ports for control lines ,so speed stays the same so you are looking at total of 23 analog ports ,with 3 address lines
I hear some using up to 3 ezb in one robot,thats a big waste of money each board is about $70 ,compare to a part thats $.50 PLUS A SMALL PCB FROM RADIO SHACK thats all s needed no other parts.
WOW for once we are not arguing ,thats a first
Yes, I was about to comment that you guys are acting civil. Congratulations, maybe you two can work together to make a super robot.