






















-634700966886250000.jpg)
-634700967015000000.jpg)
-634700967157968750.jpg)










-634702814800312500.jpg)



-634702600865468750.jpg)
-634702601116718750.jpg)
-634702602252031250.jpg)
-634702602665625000.jpg)
-634702602851875000.jpg)



-634694134410000000.jpg)

-634693960892812500.jpg)
-634693961752343750.jpg)
-634693953179375000.jpg)
-634693953336093750.jpg)
-634693164809062500.jpg)
-634693165327500000.jpg)
-634693165925625000.jpg)
-634693166147343750.jpg)

-634786542943876953.jpg)

-634796120303593750.jpg)
-634796120470312500.jpg)
-634812479455986328.jpg)
-634812479726035156.jpg)
-634812480620283203.jpg)
-634812481334052734.jpg)
-634812482341699218.jpg)

-634822681001005859.jpg)
-634822681580644531.jpg)
-634822681777470703.jpg)
-634821106166250000.jpg)
-634821106572812500.jpg)
-634821106815625000.jpg)

-634814909605058593.jpg)
-634814909850224609.jpg)
-634814910193212890.jpg)
-634814910596445312.jpg)


-634820188048437500.jpg)
-634820188647187500.jpg)
-634820189032656250.jpg)
-634718079154687500.jpg)
-634718080622031250.jpg)
-634714909191250000.jpg)
-634714909644843750.jpg)
-634713078392031250.jpg)
-634713078781250000.jpg)

-634720009877968750.jpg)
-634749341545937500.jpg)
-634749341951406250.jpg)
-634732946203437500.jpg)

-634708797562402343.jpg)

-634706000248750000.jpg)

-634705927185312500.jpg)
-634705927626406250.jpg)
-634705928146250000.jpg)
-634705929045781250.jpg)
-634705929717812500.jpg)
-634705930336093750.jpg)
-634705930540468750.jpg)
-634705931037812500.jpg)



-634709695807265625.jpg)
-634709696076181640.jpg)

-634711364771718750.jpg)
-634711364485781250.jpg)
-634712172318906250.jpg)
-634771897291406250.jpg)
-634771897466093750.jpg)
-634771897849687500.jpg)
-634771898236093750.jpg)
-634771898712187500.jpg)
-634771899102656250.jpg)
-634771899822656250.jpg)
-634771900771562500.jpg)
-634771901301875000.jpg)

-634768466924746093.jpg)
-634768467383681640.jpg)

-634772580489218750.jpg)
-634772581075781250.jpg)
-634772581532343750.jpg)
-634772581721718750.jpg)


-634773400815625000.jpg)
-634773401032187500.jpg)
-634781365777988281.jpg)
-634781366040302734.jpg)
-634781366299042968.jpg)

-634766553798554687.jpg)
-634766556025839843.jpg)

-634759732245312500.jpg)
-634765021896093750.jpg)
-634765022115000000.jpg)
-634765022326562500.jpg)
-634765023386093750.jpg)
-634765855550937500.jpg)
-634765856533437500.jpg)
-634765856756250000.jpg)

-634845177217089843.jpg)
-634845177425585937.jpg)




-634857207521406250.jpg)
-634857208212500000.jpg)
-634857208786718750.jpg)





-634826982093593750.jpg)

-634838602835000000.jpg)
-634838603089687500.jpg)
-634838603585312500.jpg)

-634871181815468750.jpg)
-634871183099531250.jpg)
-634871128238750000.jpg)
-634870976497031250.jpg)
-634870976894687500.jpg)
-634880528374375000.jpg)
-634880528707656250.jpg)
-634880529073593750.jpg)

-634892824736386719.jpg)
-634892824903066406.jpg)
-634892825090117187.jpg)
-634892825255283203.jpg)
-634880812756406250.jpg)

-634870194470625000.jpg)
-634870194829687500.jpg)
-634865232676250000.jpg)
-634863402043750000.jpg)
-634863402351562500.jpg)
-634863402584218750.jpg)
-634863404238125000.jpg)
-634869405242656250.jpg)
-634869405424687500.jpg)
-634869405586562500.jpg)
-634869405943906250.jpg)
-634869406072656250.jpg)
-634869404353281250.jpg)
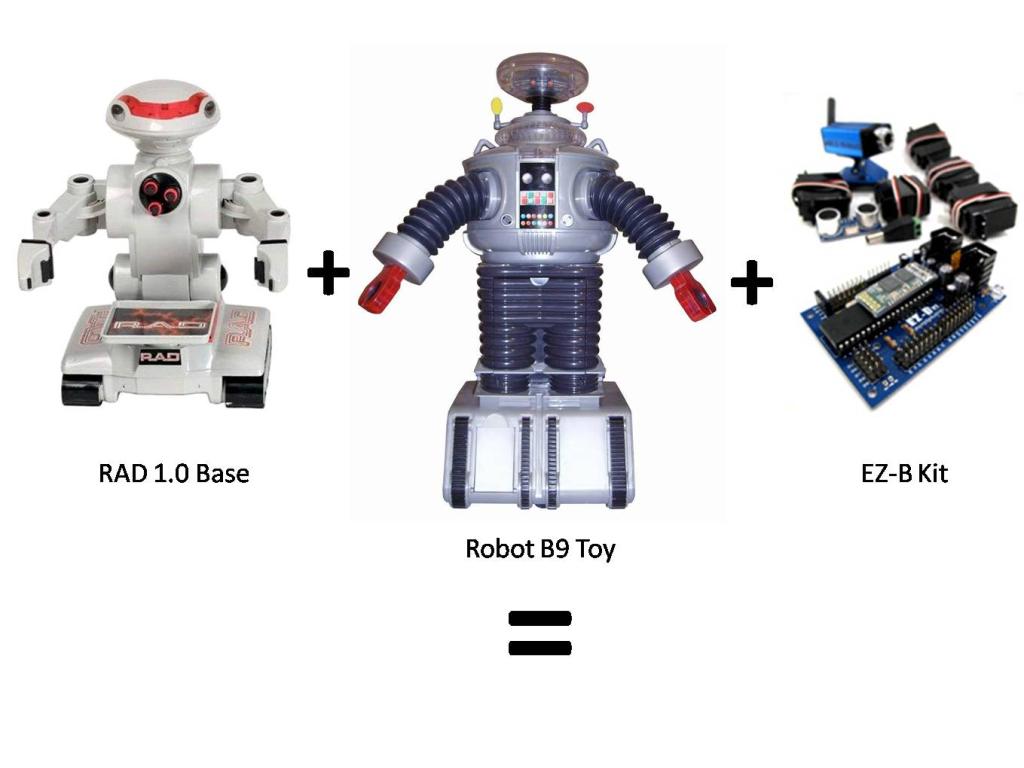
Now that I have finished B.O.B., my get your feet wet bot, I have begun my next hack. This next robot will bridge the gap between Bob and my ultimate big robot. I am starting with a remote controlled B9 toy from Trendmasters. It was very limited in what it did, and the drive section was pathetic, but it was B9!
Before Pics:


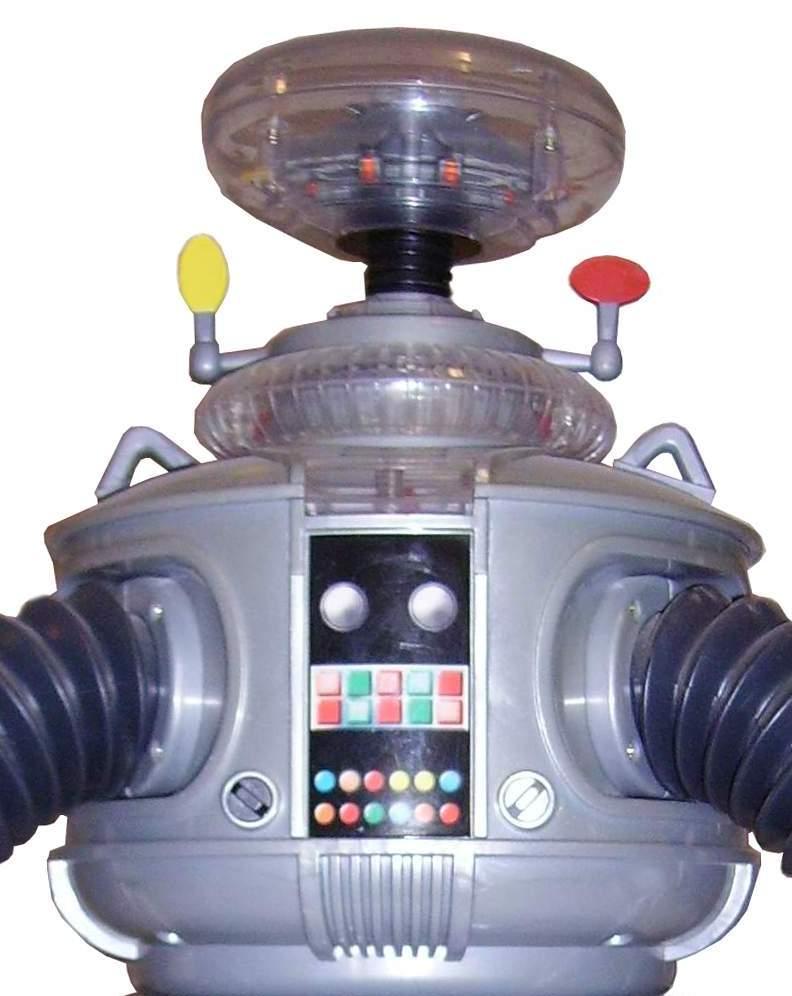
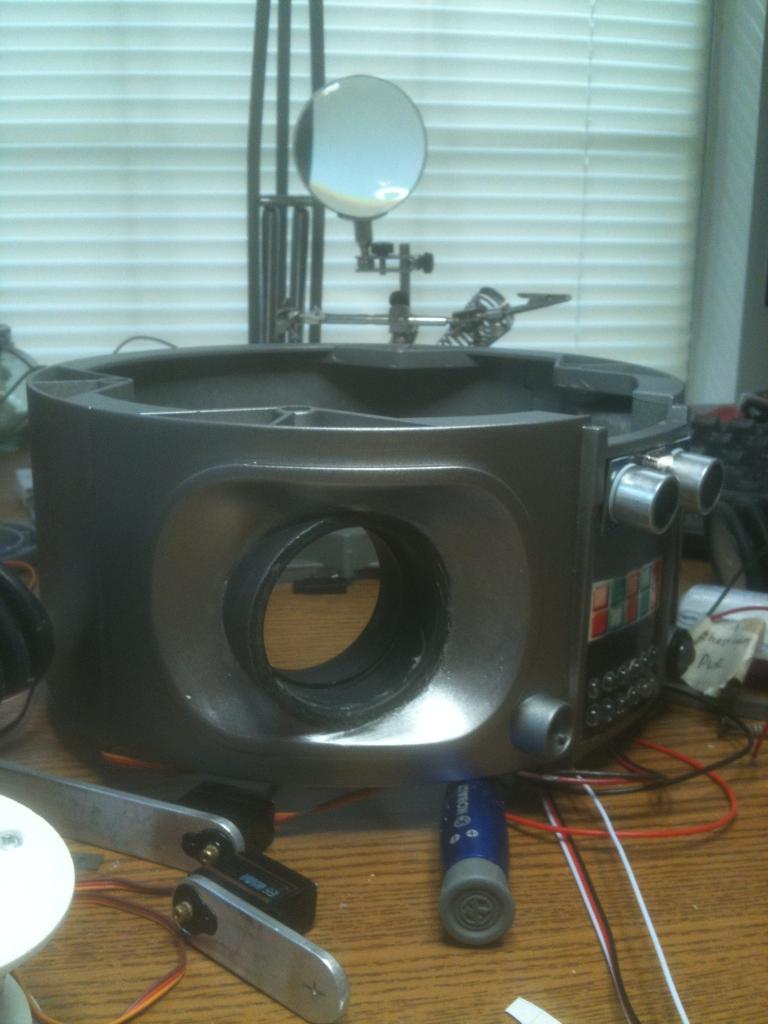
Here is what B9 looks like now:

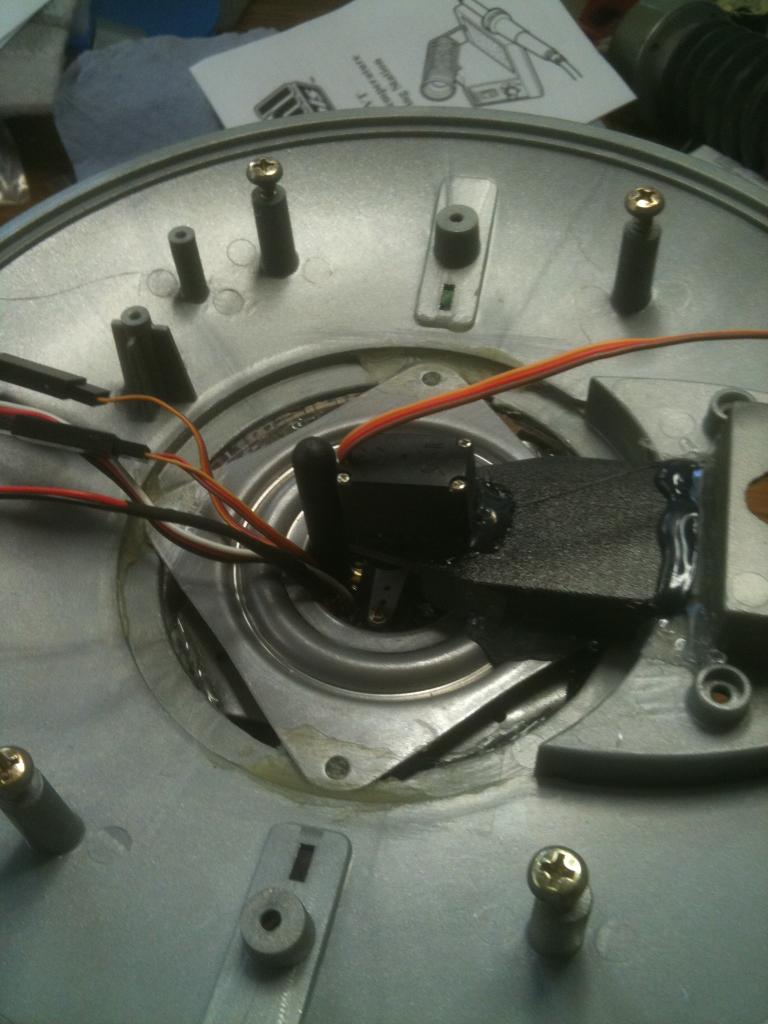
I have mounted clear LEDs in the appropriate colors in the chest at the bottom of the decal and have a flashing circuit that will blink them in the combination as seen on the series. Where the two large round circles are (white domes on the big guy) I will have my ping sensor. I have mounted pager motors in the antenna housings to turn the "sensors" as seen in the TV version. I have mounted red El Wire to his voice plate to emulate the original as well. I have also mounted a series of blinking LEDs to the "brain" section in the bubble.
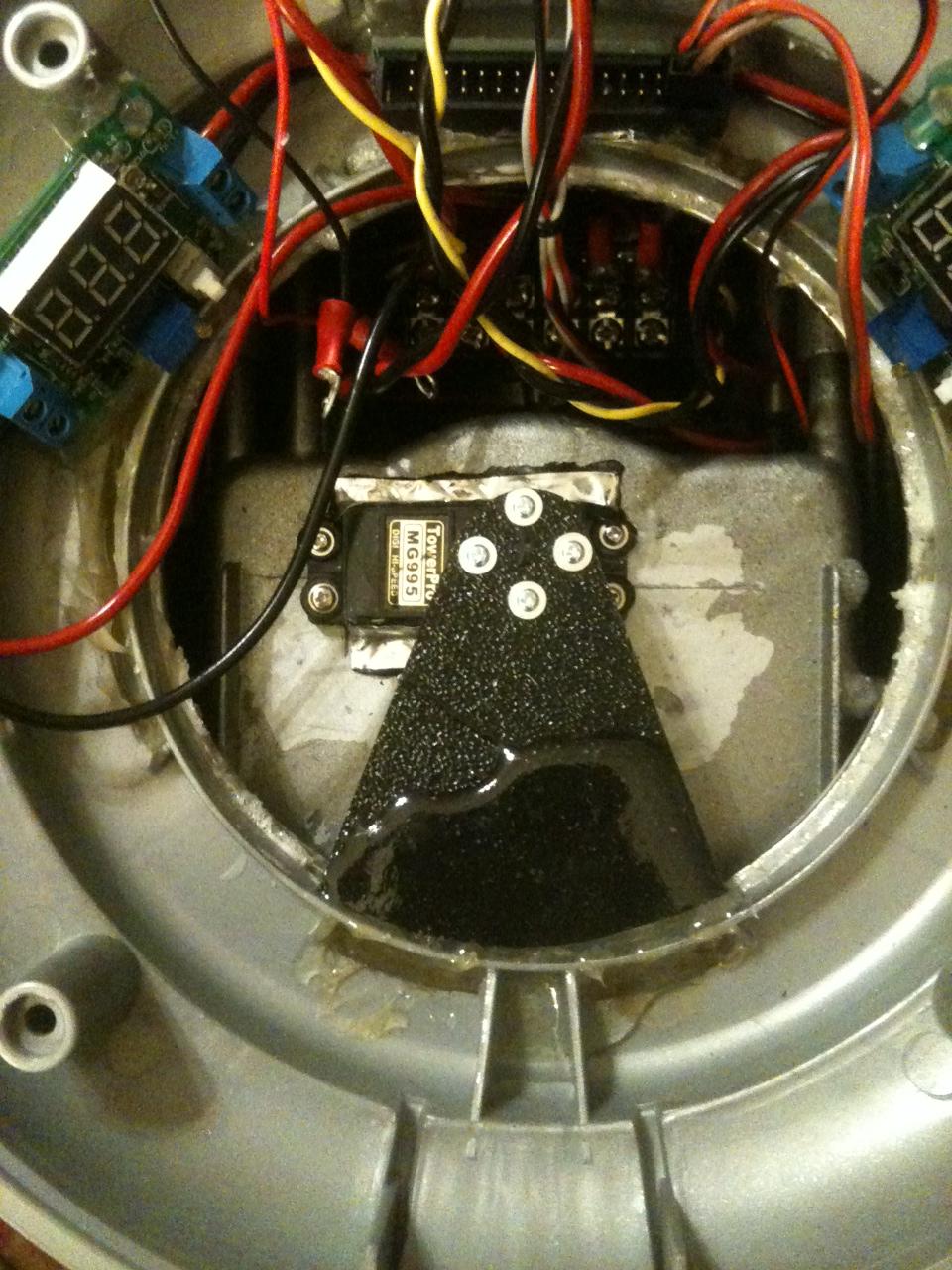
Next is to work on the rotation of the bubble and torso, articulate the arms and claws, and make a real functioning tread section. For the tread section I am adapting the base from my RAD robot. I will keep you posted with pics as I proceed.
Thanks,
Bret
Discover more robots
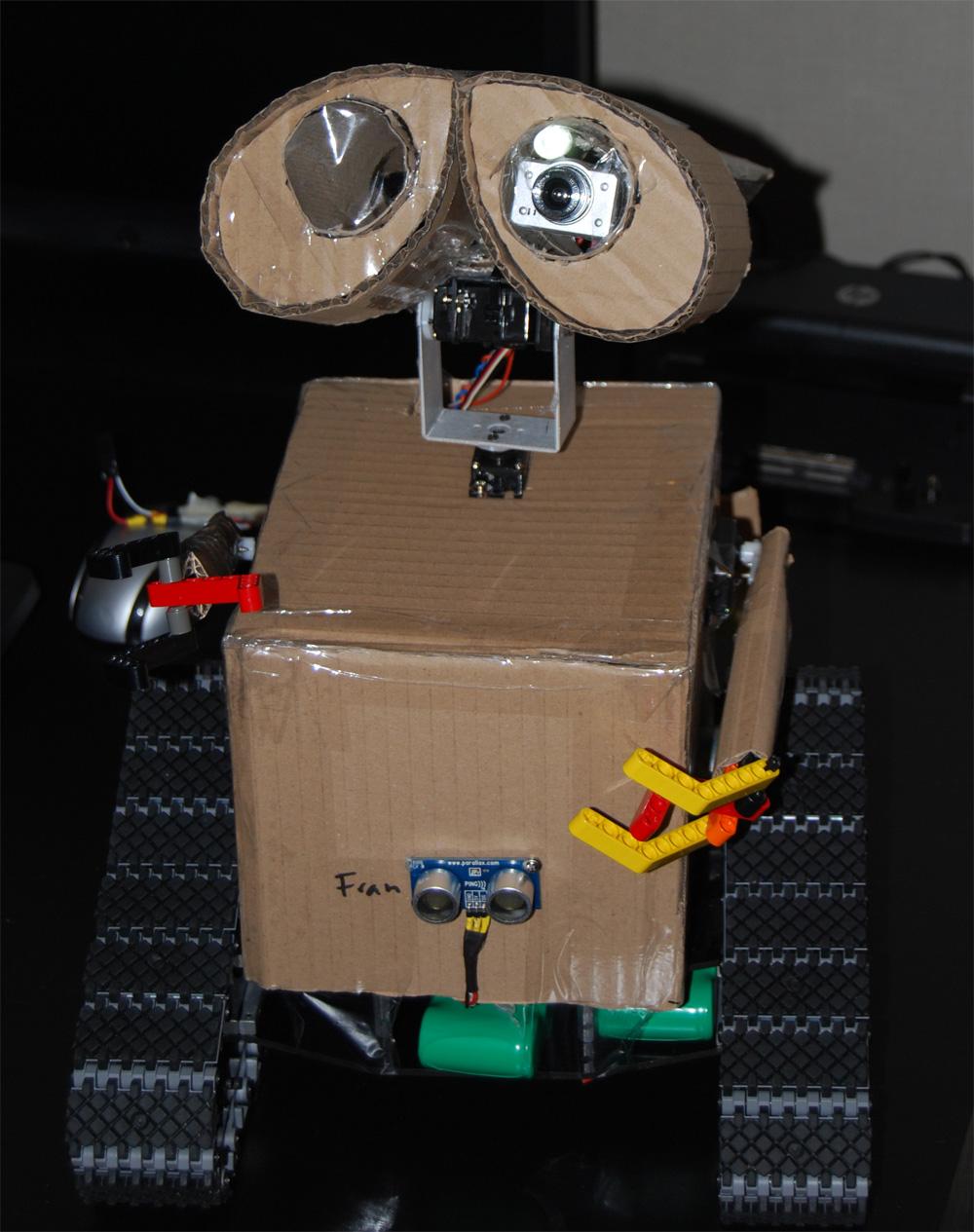
Henrik's Cardboard Wall-E!

Lizpoir's Omnibot 200 In Germany

Thanks guys! I just ran it direct from the battery and it ran great! Even with a lot of weight added to it. So I am thinking it is in the motor controller. Your thoughts?
Yes those motors are drawing a great deal more than the motor controller can.provide. so now you need to measure your current with bot fully loaded. Write that down , then measure current and purposely stall the motors , hold it in place on carpet or somthing , take note of the amperage it jumps to , this gives you end and max current draw , from there I can help you figure out what controller will work.
Well, as I have 12 amps available, I thought I would get one of those 10amp motor controllers like you have. What do you think? That should give me about as much as the motors can take, right?
Yeah more power is better than less , always the best way to go , if I guessed basses on what I have read your motors could draw 2.5 amp and stall at 4 , but that's only from what others posted. That's why I bought my controller , it was basically low cost but at 10a a motor they would always have the power they need. I bought some l298 controllers of eBay that are 2.5amp a channel , I bought 4. Measure your amps while the bot is running then stall it. If it looks like a l298 will work I will send you one
Okay, not the easiest thing to do and my meter is not the best. But, I read a draw of between 2 and 3 amps, and it stalls at like 5 amps. It was jumping around a lot, so it could be the numbers you said. Do you think the 2.5amp controller will work?
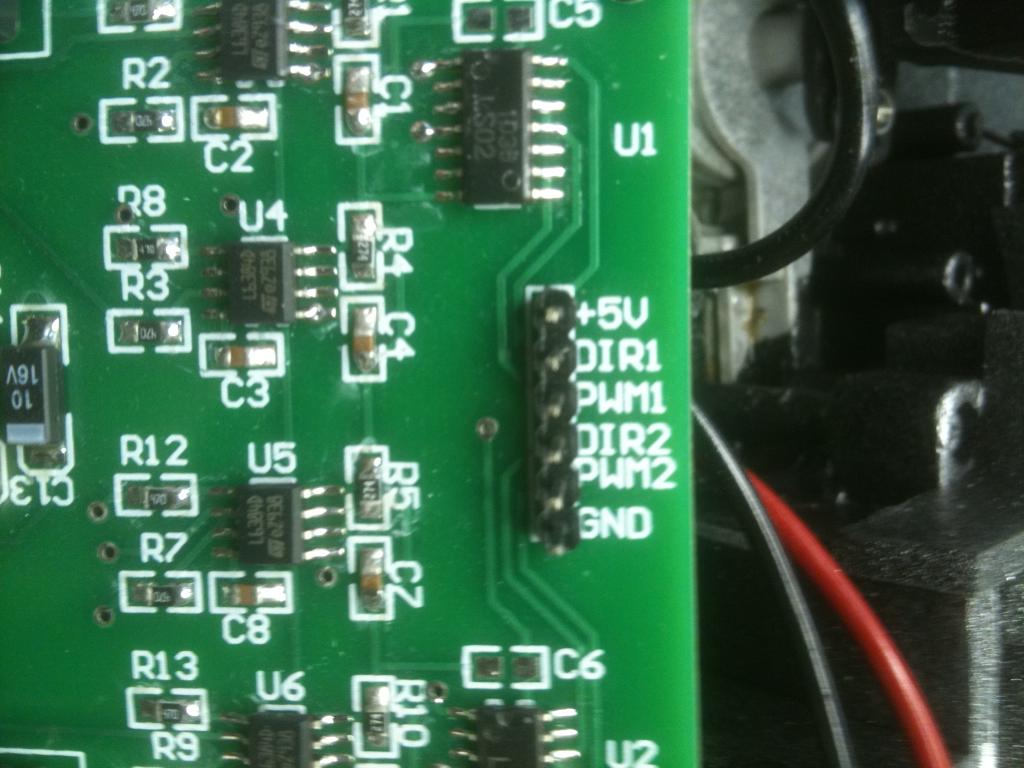
Looks like they went up 5 dollars , but still low https://www.ebay.com/itm/10A-H-bridge-Dual-DC-Motor-Driver-Controller-High-power-Strong-braking-/150800109180?pt=LH_DefaultDomain_0&hash=item231c630e7c
Take in mind this is about 3/4" longer than ezb , and with heatsinks wider too. I they claim 60amps peak , 10a continous so there's no way you could overload this ir damage it by stalling ect.
Hmmmm, this looks like the perfect solution. Does it come with those heat sinks? If not, where did you get them? I think I'll order this controller and while I'm waiting for it I can continue work on the torso and head.
These heatsinks I picked up at radioshack , 1.99 each , it doesn't come with them but I like things running cool.