

Hi Fellas.
I haven't been here for a while but have been keeping up from time to time anyways I wanted to introduce my new robot.
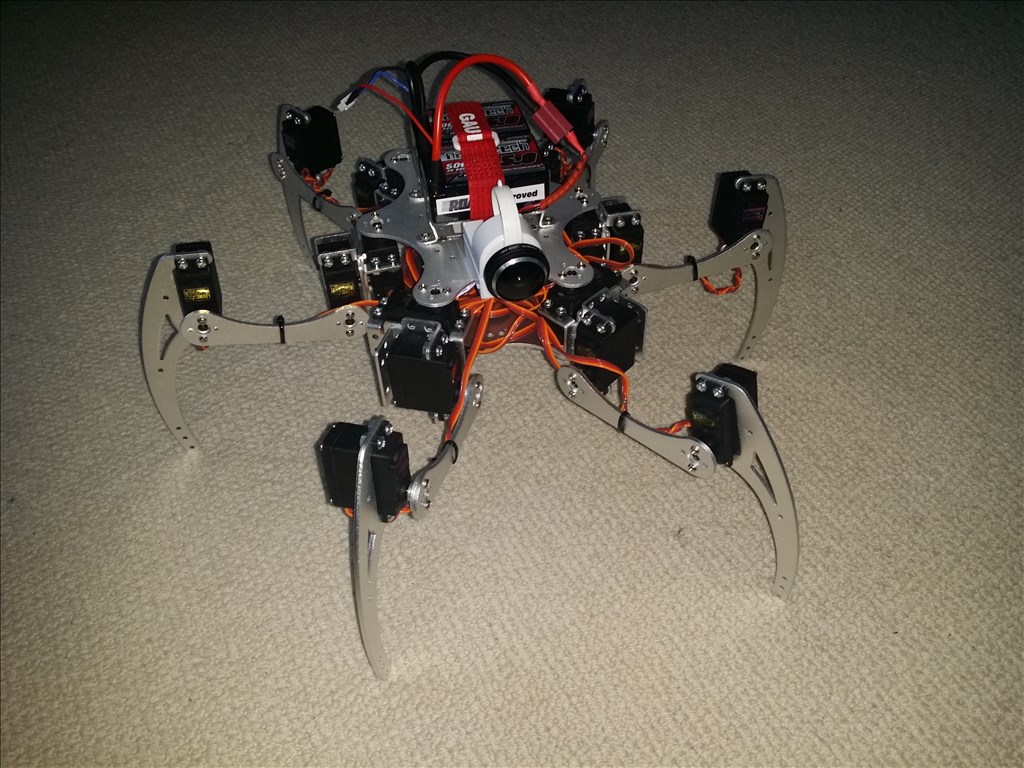
I wanted a nice Hex but I had issues with the Phoenix route so decided EZ-B was the way to go. So armed with a decent Chinese Aluminium Hex body I set to getting this thing built.
Today it took its first steps. I don't have a name yet but im sure it will come I put up some videos soon. ive just got to get it all connected again.
Im loving how easy it is to create programs with the ARC I had it walking in 2 hours
so here it is:

Im planning some sensors and maybe an attack Mode with fangs on another servo to chase the cats out of my garden.
thanks for reading. I hope the pictures are there this is my first upload...
Andre.
Discover more robots

Rich's Ez-Rover Mk I

Ezang's RGB Arduino, Python Code With ARC


Legren, I’m currently rebuilding my hexapod using the HDD Servos and EZB controller, as I complete disassembled it to using the Servos and EZB when I started my InMoov build. One of the major issues I had was because the framework was ALL metal and with the 20 Servos and 2 batteries the hexapod was extremely heavy and the Servos would buzz like mad in certain hold positions ( normal characteristics of MG996R and most other servos ).
With the HDD Servos there’s no buzzing at all, and are fantastic servos.
I’ll post pics and video once completed.
Chris.
Legren, your questions are correct. Simply connect up to 24 servos directly to the ezb and programming is fun, not compiling and stuff. Add camera and speech and joysticks. Even make a mobile app for your robot without having to compile etc.
Thank you both for the replies. My SIX is on it's way to me (I expect it to arrive day after tomorrow!) and based on your replies I'm excited and expect I'll be ordering an additional EZB as well. I have lots of extra stuff laying around I could put to use if the ezb is as I now expect! Again thank you both! Oh and does six require a ultra sonic distance sensor for true object tracking or is it only to improve tracking?
Distance sensor is for detecting distance - nothing to do with objects. For object tracking, the camera is used. You can find out more using the robot program. There's plenty of great activities at the robot program in the learn section.
Is there a program or script for a hexapod with 3dof for 18 servos controlling the legs? Or even for SIX with an extra servo per leg?
Not that I know of, but using the Auto-position control will make it easy to create your own brand new walking gait with 3dof per leg